前の記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その11
さて・・・ライントレースができて、ギャップが越えられるようになったら・・・次は、障害物の回避ですね。
障害物の回避は、LINK方式です。
「LINK」は、産技高専のチームで、M&Yが参加してた頃の、みんなの憧れのスタープレーヤーでした。(笑)
そのLINKのロボットが採用していた障害物回避の方法が「LINK方式」です。
(実際には、「LINK」の先輩の「P1」が編み出した方式らしいです・・・)
それは・・・障害物のまわりを回るのに、障害物から大きく離れないように回ります。
例えば障害物を右回りで回避する時には・・・障害物を認識したロボットは右に向きます。(そうするとロボットの左側に障害物がありますね) ロボットは右側の車輪だけを正回転(前進)します。(そうするとロボットは左前に進むので、いずれ左前が障害物にぶつかりますね) ロボットの左側が障害物に触れたら、ちょっとだけロボットを左に向けます。そしてまた、右車輪だけ正回転します・・・を繰り返して、障害物の周りを回って、その間に向こう側の黒線を探します。
これであれば、障害物が直線の上に置かれていようと、直角の上に置かれていようと、回避が可能です。
ただ、この「LINK方式」を実現するためには、ロボットのバンパーが前からのタッチだけでなく、横からのタッチも検知する必要があります。(勿論、M&Y zwei は、横からのタッチも検知するバンパーを装備しています)
ということで、LINK方式の障害物回避を組み込んで走らせてみました。
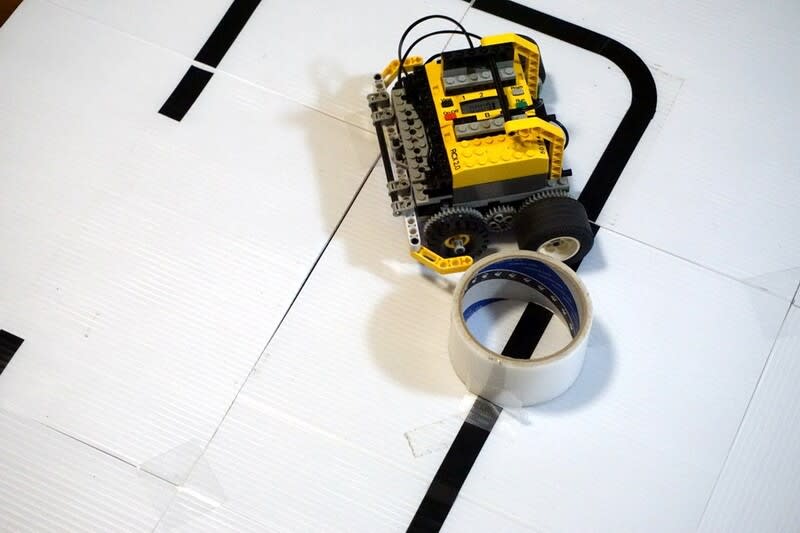

はい、障害物の回避もOKです。(笑)
これで、一通りのライントレースはこなせるようになりました。
以下動画です。
いまさらながらRCXを動かしてみるプロジェクト!? その12 障害物の回避
続きの記事はこちら いまさらながらRCXを動かしてみるプロジェクト!? その13