








ロボカップジュニアのレスキューB競技では、ロボットがスタートしたタイルに戻ってきて、そのタイルで競技を終了すると、Exit Bonus というボーナス得点が追加されます。
このボーナス得点ですが・・・
レスキューBの、長い(短い)歴史の中で何度か変わっています。
最初は・・・そんなボーナス得点はありませんでした。そもそも「スタート地点に戻る」という発想がありませんでした。フィールド内の被災者を全員発見したら終わり・・・
その次は、20点・・・そうたったの20点でした。まだ、その頃は「戻れるロボットなんて無いだろう」という感じだったのかしれません。
その後「発見した被災者の数×10点」になりました。だから7人発見した後にスタート地点に戻ると70点になります。逆に、一人も発見せずにスタート地点に戻ってもボ-ナス点は0点です。(せっかく戻れたのに、ねぇ・・・)
そして最近は、(ボーナス得点のルール変更ではありませんが)、スタートタイルは必ず銀タイル、という変更がなされたので、ちょっと難易度が下がりました。
前置きが長くなりましたが・・・
(私が見る限り・・・)世界大会でも競技でスタートタイルに戻れる実力のあるチームはごく少ないです。
それらのチームは、きちんとマッピングをしています。つまり、ロボットの中にフィールドの地図を描きながら(自分がその中のどこに居るのかを把握しながら)迷路を進みます。
だから、自分がスタートタイルに戻ってきたかどうかがちゃんと分かります。
じゃあ、マッピングをしていないと、Exit Bonus は得られないのか!?
これまで、いろんなチームが試行錯誤をして、なんとか (マッピングをせずに!?)Exit Bonus を得ようと努力をしてきました。それらを紹介したいと思います。
1.スタートタイルにマーカーを置く
スタート地点に何か(カードのようなもの)を落とし・・・迷路を探索中に床にそのカードの色を感知したら、そこをスタートタイルと判断してロボットを停止する。という作戦のロボットが、2013年のEindhoven世界大会に参加していました。しかし、これは「競技は1台のロボットでやる」というルールに抵触していると判断され、それ以降は使われなくなりました。(分離ロボットに当たると判断)
2.進んだ距離でスタートタイルを判断する
これも、2013年のEindhoven世界大会で、そういうロボットのチームがありました。このチームのロボットは、単純に右手法で進みました。右の壁に沿って進み、フィールドを一周してスタートタイルに戻った時に、ピタリと止まりました。そのとき、近くで見ていた私は、どういう仕組みでスタートタイルを判断して止まったのか、全く分からなかったのですが、あとでインタビューで確認してもらったら「進んだ距離で判断した」とのことでした。
なるほど、確かに理論的には可能だと思います。しかし、実現にフィールドのコ-スをぐるりと一周してきて、スタートタイルにピタッと止めるのは可能でしょうか!? 不可能ではないけど、難しいですよね。まず、ロボットが進んだ距離をそんなに正確に測れたのでしょうか!? 楊枝が撒かれていたり、バンプもありました。 実際の競技コースで走らせてみて、停止する距離を計測したのなら、まだ分かりますが・・・競技アリーナでは練習ができません。競技のコースを周りから見ただけで距離を計算(想定)しただけで、ぴったりと止めることができるでしょうか!?
私は、とっても怪しいと考えています。(つまり、何かしらのズルをしたのではないかと・・・) 事実、その一回の競技以降は全ての競技で Give up していました。(ロボットの走行中にリタイアした、ということ)
3.決め撃ち
あからさまにルール違反です。(苦笑)
でも、スタートして3タイル先の被災者を発見、3タイル戻ってロボットが停止・・・
これで「決め撃ちじゃない」というのなら、どういった釈明をするのか聞きたいです。
ということで、やっぱり真面目にマッピングをしないと Exit Bonus はやっぱり貰えないのでしょうか!?
ちょっと前までは、そう考えていました。
でも、最近マッピングをしなくても出来るんじゃないかと思っています。
例えばこんなコ-スで、

右手法で進んだとすると・・・
右前前前 これで被災者Aのタイルに到達します。
右右前右前前右左前 これで被災者Bのタイルに到達します。
前左前前左前右前 これで被災者Cのタイルに到達します。
右前右右前前前 これでスタートタイルに戻ります。
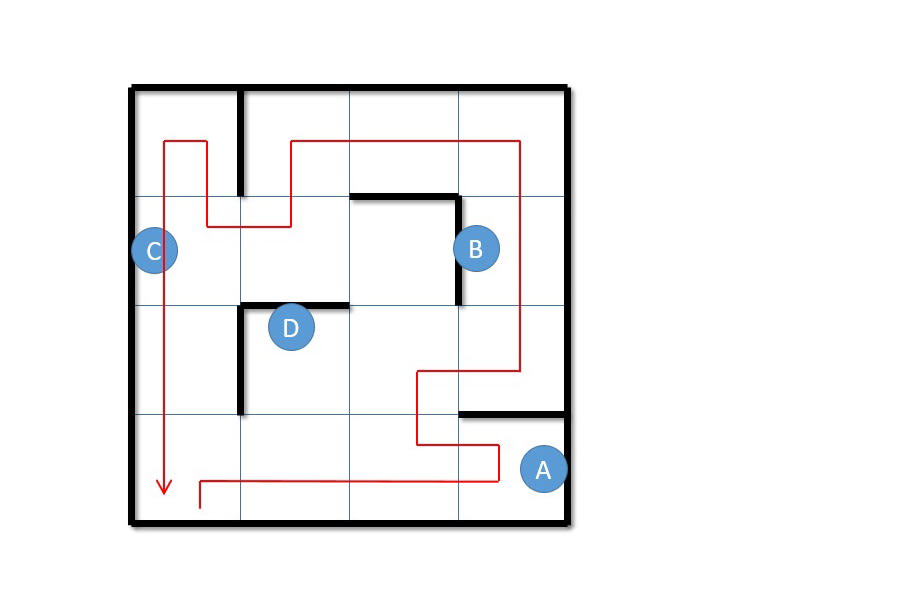
この経路では(右手法だけでは)、被災者Dは発見できませんが、それは仕方がありません。
この進んだ経路をもうちょっと分かりやすく整理します。
最初に向いていた方向を北だとして・・・
東東東 被災者A
西北東北 被災者B
北西西南西 被災者C
北南南南 スタートに戻る
こんな感じになりますよね。
東に進んだ回数と西に進んだ回数が同じ 北に進んだ回数と南に進んだ回数が同じ であれば、スタート地点に戻ったことが分かります。
ロボットがどちらの方角に何回進んだかを累積すれば、スタートタイルに戻ったかどうかを判断できますね。
まあ、「どちらの方角に何回進んだか」これを、確実に計測することが難しい・・・ですかねぇ。
それができるくらいなら、真っ当にマッピングをするよ・・・はい、ごもっとも















