








前の記事はこちら EV3ねた その21 ev3devのC言語
ev3dev の C言語
サンプルプログラムが動かなかったり・・・でも、動くものもあったり・・・良く分からない状態です。
こんなページがありました。
これに従って、ソースの編集から実行までをやってみます。
ホームディレクトリを /home/robot/ev3dev-c として・・・(pwd で、現在のディレクトリが表示されます)
mkdir c-demo
cd c-demo
新しく c-demo というディレクトリを作成して、そこに移ります。
nano main.c
nano というスクリーンエディタで、main.c を編集します。(今回は新規作成します)
#include
int main()
{
printf("Hello world!\n");
return 0;
}
これを入力したら Ctrl+o で書き込み、Ctrl+x で nano を終了します。
これで、main.c にサンプルプログラムが書き込まれました。
次に Makefile を作成します。
nano Makefile
再びスクリーンエディタを使って、Makefileを作成します。
all: main.o
gcc main.o -o bin
main.o: main.c
gcc -I . -c main.c
clean:
rm -rf *.o
rm bin
(↑ TABが消えて分かりにくいですね。)
作成した Makefile を使用してコンパイルするには
make
と入力します。
gcc -I . -c main.c
gcc main.o -o bin
と表示されて、プロンプトに戻ります。
プログラムの実行は・・・
./bin
で・・・
画面に「Hello world!」が表示されます。
ということで、基本は、なんとなく分かりました。
それから・・・
PCからプログラムを実行するのではなく、EV3単体で実行する方法が分かりました。
EV3に表示されているメニューの一番上の「File Browser」を選択すると、現在のディレクトリと、そのディレクトリにあるファイルの一覧が表示されます。(表示できる行数が少ないので、分かりにくいですが・・・)
そこで、実行したいオブジェクトファイル(コンパイルして作成したファイル)のあるディレクトリに移って、実行したいファイルを選択するとプログラムが動作します。
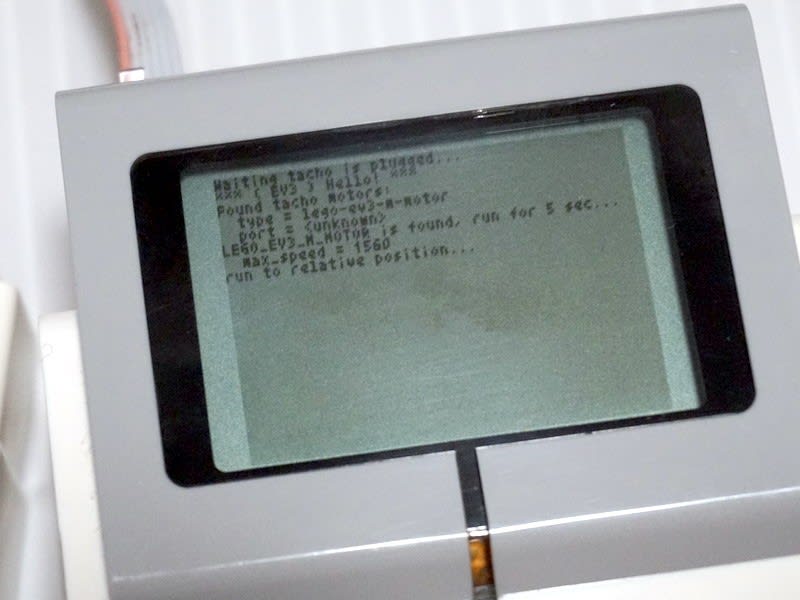
サンプルプログラムにある tacho を実行すると、EV3のディスプレイに細かい文字でズラズラっと表示されます。(プログラムが終了すると、メニュー表示に戻ります。)
さて、単純なプログラム作成方法は分かったのですが・・・次は、肝心のセンサーやモーターの使い方の研究ですね。
続きの記事はこちら EV3ねた その23 ev3devのPythonに挑戦!?





