








先日の東東京ノード大会2020では、プレゼン審査員を「P1」「P2」と一緒にやりました。
午前中に、すべてのプレゼン評価を終えて、午後は、レスキュー(ライン)の競技を一緒に見ました。
やっぱり気になるのが、競技進行停止の多さ、です。
昔はxxだったよね・・・というのは、おじいさんが昔のことを美化して言うことですが・・・
昔は(競技進行停止が)こんなに多くなかったよね。
と、まじめに考えています。
で、「P1」「P2」と一緒に、昔の(2008年頃の)懐かしい話をしながら見ていて、はたと気が付きました。
この頃のレスキューライン競技で競技進行停止が多いのは、ロボットが退化しているせいではないかと・・・
2008年頃は、地面に張り付いた銀の被災者、緑の被災者を発見する競技でした。
それから、どんどんと(レスキューラインの)ルールが複雑化し、被災者が缶になり、その後には被災者が銀のボールになり、黒のボールが追加され、2020年ルールではレスキューキットまで追加されました。
被災者が缶になったころから、(アームと搭載するようになり)ロボットが巨大化しました。(それはしかたがないのですが・・・)
で、私が「退化」と言っているのは、ライントレースをする機構の部分です。
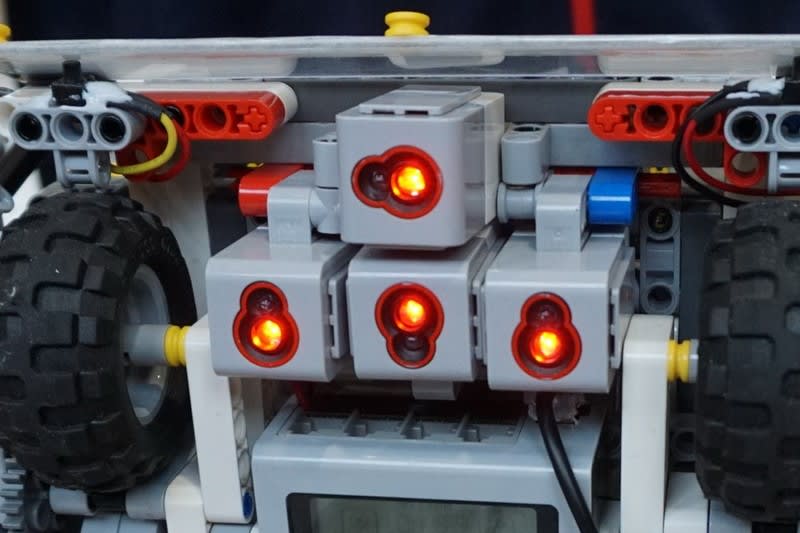
ライントレースするためには、ロボットの下に黒線を感知するための光センサー(現在はカラーセンサー?)を装備しますよね。
昔は光センサーを3つ並べていました。しかも、RCX用の小さな光センサーを並べていました。

こんな感じです。
これであれば、ロボットは、「現在ロボットが黒線の上にいるのか、黒線を外れているのか」を認識することができました。
基本的な動きとして
・真ん中の光センサーが黒線の上にあれば直進する。
・真ん中の光センサーが黒線の上になく、右の光センサーが黒線の上にあれば右に曲がる
・真ん中の光センサーが黒線の上になく、左の光センサーが黒線の上にあれば左に曲がる
・3つの光センサーが黒線の上に無い時は、黒線は外れたかギャップに入った
まあ、こんな感じですね。
で、ギャップに入った時には、前に進みながら左右に回転して先の黒線を探します。
単に黒線から外れた場合でも、ギャップと同様に左右に回転しながら進み黒線を探すので、黒線に復帰できる確率が高かったです。
で・・・近年は、LEGOのロボットはEV3になりました。(まだNXTを使用しているチームもありますね)
このライントレースするための光センサーが(RCX用に比べて)巨大化しました。
このためか、2つのセンサーでライントレースをするロボットがほとんどです。
たまに、3つのセンサーを並べているロボットもありますが、センサー自体が大きいので(センサー間の)間隔が広いです。
何が言いたいかというと・・・近年のLEGOロボットは、自分が黒線の上に居るのか、黒線を外れているのか の判断が付いていない(のではないか!?)ということです。
そもそも、2つの光センサーでライントレースするロボットは、ギャップをどのように検出するのでしょうか?
ということで、(あくまでも私の個人的な見解ですが)近年のLEGOロボットで競技進行停止がめちゃ多いのは、LEGOのEV3用やNXT用の光センサーを大きくしてしまったことが原因ではないかと・・・
RCX用位の大きさの光センサーを出せば売れると思うのですが・・・ねぇ。
それか、LEGOロボットも光センサーだけは、自作した方が良いかと・・・
ついでに・・・M&Y家族ではRCJ Rescue(現状ではLine)について勝手に
第1世代 P1 P2 LINK あたり
第1.5世代 M&Y RCXレスキュー隊 あたり
第2世代 3T-ROBOT Amalgam あたり
としています。
今は、何世代位でしょうか?
















