








2007年5月5日
 本日は、ロボカップジャパンオープン大阪の最終日で、ジュニアレスキューでは、上位6チームの決勝が行われます。 「M&Y」は予選3位で通過して、決勝への進出を果たしました。 早速、朝から調整ですが・・・決勝のコースは超難しいです。 1つ目の部屋の最初の被災者がきついカーブの上のあり、そこでどうしても外れてしまいます。 また、ギャップが2つあり、鋭角のカーブもあります。 最後のレッドゾーンには障害物が2個も置かれています。
本日は、ロボカップジャパンオープン大阪の最終日で、ジュニアレスキューでは、上位6チームの決勝が行われます。 「M&Y」は予選3位で通過して、決勝への進出を果たしました。 早速、朝から調整ですが・・・決勝のコースは超難しいです。 1つ目の部屋の最初の被災者がきついカーブの上のあり、そこでどうしても外れてしまいます。 また、ギャップが2つあり、鋭角のカーブもあります。 最後のレッドゾーンには障害物が2個も置かれています。

 本日は、予選4位の「飯田橋Re:Q」とマルチチームを組みます。 「飯田橋Re:Q」は、2階のレッドゾーンをランダム走行するため、「M&Y」が先に出て、先にゴールして、残りの時間は相手チームが最後まで使うことになりました。 いよいよ「M&Y」と「飯田橋Re:Q」のマルチチームの順番になりました。 「M&Y」がスタートし、途中までは順調でした・・・ところが、3つめの部屋のギャップで黒線から外れて、反対側の壁にぶつかったときにレッドゾーン用のプログラムが発動してしまいました。 これではもうどうすることも出来ないと判断したMは「リタイヤ」を宣言しました。 私も家内も、「これでアトランタ(世界大会)は無くなった。」と思い、競技台を離れました。
本日は、予選4位の「飯田橋Re:Q」とマルチチームを組みます。 「飯田橋Re:Q」は、2階のレッドゾーンをランダム走行するため、「M&Y」が先に出て、先にゴールして、残りの時間は相手チームが最後まで使うことになりました。 いよいよ「M&Y」と「飯田橋Re:Q」のマルチチームの順番になりました。 「M&Y」がスタートし、途中までは順調でした・・・ところが、3つめの部屋のギャップで黒線から外れて、反対側の壁にぶつかったときにレッドゾーン用のプログラムが発動してしまいました。 これではもうどうすることも出来ないと判断したMは「リタイヤ」を宣言しました。 私も家内も、「これでアトランタ(世界大会)は無くなった。」と思い、競技台を離れました。
 この後、「P2」も、1階でレッドゾーンプログラムが誤発動し、誤発見をしまくる場面がありました。 Mは自分の(プログラムの)未熟さを悔やんで泣きました、Yも悔しくて?2人で机に伏していました。(その後、Yは気持ちよく寝てしまったそうです) その2人から離れて、同じように頭を抱えている「P2」が居て、(不謹慎ですが・・・)ちょっとおもしろかったです。
この後、「P2」も、1階でレッドゾーンプログラムが誤発動し、誤発見をしまくる場面がありました。 Mは自分の(プログラムの)未熟さを悔やんで泣きました、Yも悔しくて?2人で机に伏していました。(その後、Yは気持ちよく寝てしまったそうです) その2人から離れて、同じように頭を抱えている「P2」が居て、(不謹慎ですが・・・)ちょっとおもしろかったです。
1回目の競技が終わった時点で86点で、6チーム中の4位でした。(「M&Y」を含めて2チームが途中リタイヤし、5位も1点差でした) 3位は同じチームの「飯田橋Re:Q」で107点でした。

 午後になり、2回目の競技では、ギャップも超えて普通に進みました。 無事に2階に入りレッドゾーンプログラムも作動して、順調に被災者を発見していきます。 最後に障害物をすり抜けてゴールに行く・・・はずだったのですが、前のマルチチームのロボットの1台が障害物を押してしまい、位置がずれていました。 その微妙な障害物のズレが災いして、「M&Y」のロボットは障害物に乗り上げてひっくり返りそうになりました。
午後になり、2回目の競技では、ギャップも超えて普通に進みました。 無事に2階に入りレッドゾーンプログラムも作動して、順調に被災者を発見していきます。 最後に障害物をすり抜けてゴールに行く・・・はずだったのですが、前のマルチチームのロボットの1台が障害物を押してしまい、位置がずれていました。 その微妙な障害物のズレが災いして、「M&Y」のロボットは障害物に乗り上げてひっくり返りそうになりました。 (東京ノード大会の悪夢再来か!) すかさず、Mは「リタイヤ」を宣言しました。 競技が終わり、「飯田橋Re:Q」とお互いの点数を交換すると、やっぱり3点差くら いで、相手チームの方が上のようです。 残念ですがどうしようもありません。 昨日のパートナーの「龍」が義理堅く応援に来てくれていたのですが・・・
(東京ノード大会の悪夢再来か!) すかさず、Mは「リタイヤ」を宣言しました。 競技が終わり、「飯田橋Re:Q」とお互いの点数を交換すると、やっぱり3点差くら いで、相手チームの方が上のようです。 残念ですがどうしようもありません。 昨日のパートナーの「龍」が義理堅く応援に来てくれていたのですが・・・
とりあえず、セカンダリの競技を見て、昨日仲良しになった「あめふらし☆」の家族と一緒に遅い昼食を食べに外に出ました。 入ったのがトンカツ屋で、Mはトンカツを食べました。 このときにカツ(勝つ?)パワーが、注入されたかは分かりませんが・・・16:00からの表彰式に間に合わなくなりそうだったので、Mと「あめふらし☆」は走って会場に戻りました。(食べたすぐ後に走ったので、Mは気持ち悪くなったそうです。)


私たちが戻ると、表彰式が始まっていましたが、レスキューの表彰はまだまだ先のようです。 MとYは「あめふらし☆」につれられて、ダンスチームの友達のところで遊んでいました。 レスキューの表彰になったときに奇跡?が起きました。 3位に「M&Y」が呼ばれたのです。 もちろん親の私たちもびっくりしました。


MもYもびっくりしました。 急いで、ステージに上がり、 満面の笑みで表彰を受けました。 後で審判に確認したら、4位とは同点でタイム差での勝ちとのことでした。 恐るべしMのカツパワー! (逆に「飯田橋Re:Q」は、がっかりしたと思います。 どうも、Mが審判から聞いた点数を間違って覚えていたようです)
というわけで、「M&Y」は幸運にも「アトランタへの切符」を手に入れました。
プライマリ成績 1位「THE LATEST」 2位「RCXレスキュー隊」 3位「M&Y」
セカンダリ成績 1位「レスキューへの道」 2位「LINK」 3位「Antares」
競技結果は→
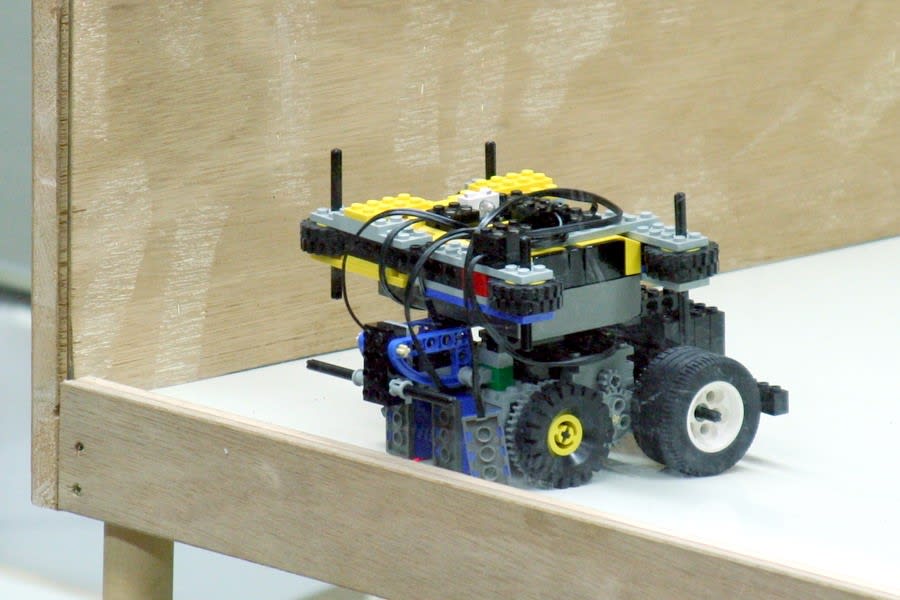
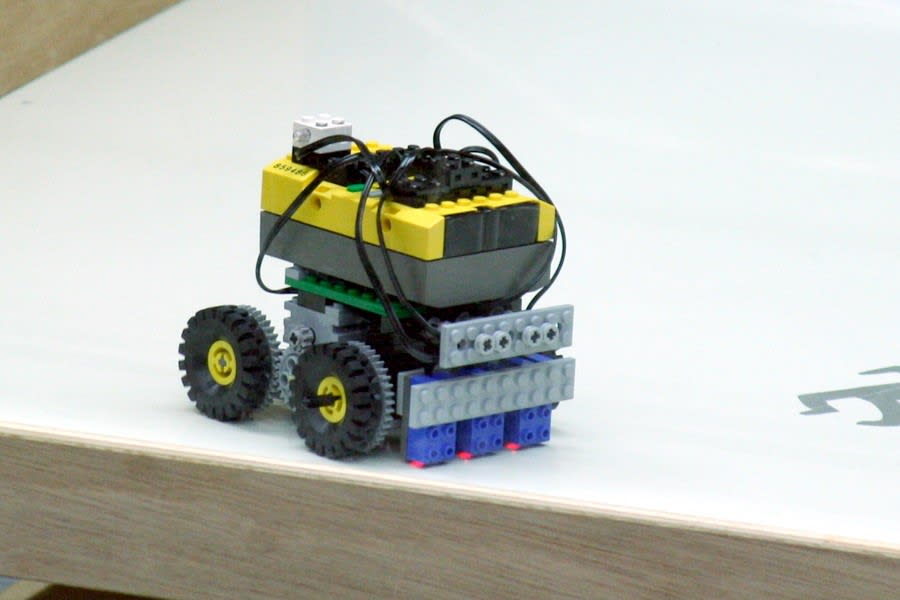
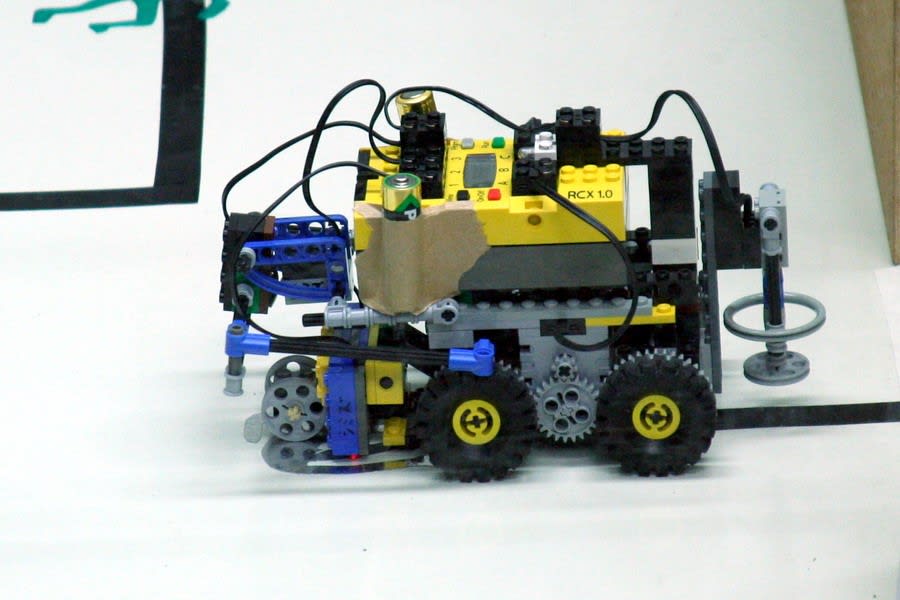
 仕方なく発行ダイオードと抵抗でランプもどきを作成しました。 どうせ作るなら・・・2色の発行ダイオードを使って、発見した被災者によって光らせる色を変えよう、ということになり、銀色の被災者を発見したら「白色」が、緑色の被災者を発見したら「緑色」が光るようになっています。 そして、3個付いている真ん中の光センサーがやっと役に立つことができました。 ライントレースは相変わらず左右の2個でやってますが、直角などのきついカーブで誤発見になる確率が高かったので、「左右のセンサーが黒の時にちょっと前進して、3つのセンサーが白になったらただのカーブ、1つでも黒なら緑の被災者」というプログラムをYが組み込みました。 これで直角カーブも怖くないぞ!
仕方なく発行ダイオードと抵抗でランプもどきを作成しました。 どうせ作るなら・・・2色の発行ダイオードを使って、発見した被災者によって光らせる色を変えよう、ということになり、銀色の被災者を発見したら「白色」が、緑色の被災者を発見したら「緑色」が光るようになっています。 そして、3個付いている真ん中の光センサーがやっと役に立つことができました。 ライントレースは相変わらず左右の2個でやってますが、直角などのきついカーブで誤発見になる確率が高かったので、「左右のセンサーが黒の時にちょっと前進して、3つのセンサーが白になったらただのカーブ、1つでも黒なら緑の被災者」というプログラムをYが組み込みました。 これで直角カーブも怖くないぞ!
光センサーも3個しか持っていなかったので、予備が欲しいと常々考えておりました。 東京ノード長の富永先生に通販のサイトを教えていただき、無事に購入できました。 このときにROBOLAB2.9も購入したのですが・・・どうもファームにバグがあるらしく、元のROBOLAB2.5.4に戻してしまいました。
「M&Y」は、光センサーを3個持っていましたので、とりあえず足りてはいたのですが・・・ 万が一のため、予備機(ロボット)を持っていきました。 この予備機の光センサー3個は、杉並区の科学館からの借り物でした。
追補 昨日のMへのミッションですが・・・「LINK」への挨拶と名刺をもらうのが残されていました。 Mは、このミッションを昼休み(決勝の1回目と2回目の間)に、 「P1」と「LINK」が話をしている最中に実行したそうです。 Mが話すと、「LINK」はわざわざ自分の席に名刺を取りに行ってくれたようでした。 ・・・自分の目的のために、場の空気を読めない娘ですみませんでした。

















































{kind=link}