はい、今度は、Rescue Maze 2021年ルールの DRAFT 版を読んでみました。
(英語は読めないので、Google先生に頼って・・・もう、しつこいか 笑)
Rescue Line の2021年ルールと同じで、変更部分がわからない(これまでのように赤色になっていない)ので、2020年ルールからの変更点がどこなのかは、よくわかりません。
ということで、私が「んっ!?」と思った部分だけ書いてます。
さて・・・最初の Scenario の下のフィールドの絵ですが・・・これ、まちがいですよね!?
さてどんどん行きます!
Summary ですが・・・
The robot will be awarded 5, 10, or 30 points respectively
被災者の得点は、色の被災者(coloured victim)は 5点と15点があるので、15点の記載が抜けてます。
それから黄色と緑色の被災者は visual victim ではなく coloured victim ですよね。
誤記 10 points for a yellow visual victim → 10 points for a yellow coloured victim
誤記 No additional points for a green visual victim → No additional points for a green coloured victim
まあ、これくらいの誤記はかわいいもんです。(笑)
「黒のタイルには入ってはいけない」になりました。詳しい変更点は下の本文のほうに書きます。
2.1.3 All walls used to create the maze are at least 15 cm high from any floor or the peaks of stairs, 30 cm in length, and are mounted on the edges of the tiles.
迷路の壁の高さが15cmですが・・・傾斜路にも15cmの壁、階段にも(階段の一番上の面から)15cmの高さの壁を設置します。ということは、傾斜路や2階はともかく、階段を設置する場所の壁は15cmの高さではなく、もっと高い壁を設置することになります。コース変更の時に階段を設置する場所ごとに壁を入れ替えなければならないので面倒ですね。階段の壁は、(他の壁と同様に)15cm限定が(面倒くさくなくて)良いと思うのですが・・・(競技会のスタッフ側としては・・・)
2.2.3 b.Silver tiles will be placed randomly at the start of each game.
黒のタイルだけでなく、銀のタイルも最初はランダムに設置して、得点走行開始時に設置しなおすようになりました。
2.3.2 Black tiles will affect the determination of wall type (linear or floating), since they can be considered as virtual walls.
被災者の得点を決めるために、やっと、黒のタイルも壁と同じ扱いをすることが明記されました。(この下に描かれている説明の絵が素晴らしい!)
2.3.3 Teams must prepare for the pathways to be slightly smaller in dimension (±10% variation on the tile size) than a tile due to the nature of placing walls.
これは、2021年ではなく2020年ルールでの変更だと思いますが・・・タイルが30cmで、壁自体の厚さがあるから、必然的に通路(経路)の幅は30cmよりも狭くなるよね・・・という説明です。
さらに±10%ということで、幅27cmの通路でも文句は言えないようになりました。
これまで、「通路の幅が30cmより狭いと」何度文句を言われたことか・・・
2.5. Victims
被災者は、現状では3種類、細かく分けると7種類になりました。熱を出す被災者、文字の被災者(3種類)、色の被災者(3種類)です。
で、この被災者の章は、付け足し付け足ししてきたので、ここらで整理したらどうでしょうか。
今回のルールでは
2.5.1 被災者全体の説明
2.5.2 熱を出す被災者の説明
2.5.3 被災者全体の説明
2.5.4 熱を出す被災者の説明
2.5.5 熱を出す被災者の説明
2.5.6 文字の被災者の説明
2.5.7 色の被災者の説明
2.5.8 被災者全体の説明
と、なんとなくバラバラです。(特に2.5.2と2.5.3は逆がいいですね)
これ・・・
被災者全体の説明
熱を出す被災者の説明
文字の被災者の説明
色の被災者の説明
の順番にしたらスッキリすると思います。
さらに、
2.5.5 There may be objects that resemble heated victims in appearance but are not victims. Such objects should not be identified as victims by robots.
これ、ダミーの被災者ですが・・・今となっては、わざわざ熱を出す被災者のダミーを作らなくても、文字の被災者や色の被災者でダミーを作ったほうが楽で効果的だと思います。(例えば、「Vの文字の被災者」とか、「紫色の被災者」とか) だから、熱を出す被災者限定ではなく、被災者全体のルールにしたほうが良いと思います。
2.5.8 Victims will never be located on walls facing black tiles or tiles with obstacles.
被災者は黒のタイルと障害物のあるタイルには設置されませんが・・・やっぱり傾斜路には設置可能ということでしょうか? レスキューキットを置くのは難しそうですが・・・(バンプのあるタイルや、銀のタイルにも設置可能!? 階段にもOKなの!?)
2.6.6 Deployment of the rescue kit must be very clear to the referee.
レスキューキットの配布は審判に明確に・・・このルールは何を意図しているのでしょうか!? う~む、ちょっとわかりません。チームは、何をすればいいのでしょうか?
おそらく・・・このルールは、2019年以前は、レスキューキットの配布の成功/失敗をレスキューキットが最初に接地した場所で判断していました。ただ、ロボットの下に落としたり、実は落ちていなくてロボットに挟まっていたり、落ちた場所が判断し辛かったので、このルールがあったのだとではないかと思います。(だから、今は、もう不要かと・・・)
3.2.2 Robots may not have any sensors or devices that enables it to 'see' over the walls.
これ、今でも必要なのでしょうか? カメラとかを積んでいて「おっ、壁の向こう側の通路に被災者が居る」というのを検知してそちらに行く、とかを想定しているのでしょうかねぇ?
3.2.9 3.2.10 3.4.5 4.2.3 4.3.2 は Line に書いたのと同様です。
3.2.9 は Line の 3.2.7 と同様でロボットのハンドル(把手)の話
3.2.10 は Line の 3.2.8 と同様でバイナリスイッチの話
3.4.5 は Line の 3.4.5 と同様でビデオテープの話
4.2.3 は Line の 4.2.3 と同様で150cm離れなければならない話
4.3.2 は Line の 4.3.7 と同様でRunは8分間の競技なのか、得点走行なのか、の話
4.3.5 The position of the black tiles will not be revealed to the team until they are ready to start a scoring run (see 4.3.7).
得点走行の開始前後のことが列挙されていますが・・・得点走行が始まるまで正しい配置をしないのは「黒のタイル」だけでなくて、「黒のタイルと銀のタイル」ですよね。
得点走行を開始する前後の作業は・・・
(キャリブレーションが終わった) → チームは得点走行の準備OK → 審判がサイコロを振って黒のタイルと銀のタイルの位置を決める(決めるだけで、まだ置かない) → 必要であれば壁を変更する → 得点走行開始 → ロボット動き出す → 審判が(サイコロで決めた位置に)黒のタイルと銀のタイルを移動する。
こんな感じでしょうか!?
4.4.2 Any parts that the robot loses intentionally or unintentionally will be left in the field until the run is over. Team members and referees are not allowed to move or remove parts from the field during a scoring run.
ロボットが落とした部品(壊れた部品)はそのまま放置するのはわかります。じゃあ、意図して落とした部品はどうでしょうか? 過去に、スタートしたらすぐに色のついたカードを落とすロボットがありました。そのカードの色を検知したら、そこがスタート地点だからロボットを止めて脱出成功! という筋書きでした。 これはOK/NGのどちらなのでしょうか?
同様のアイディアとして、光を発する機器を落としたりして、スタートタイルを判別する場合はどうでしょうか? (これまでは、機能を有する部品をわざと落とすのは、ロボットの分離=ロボットが複数台になる ので 3.3.1に抵触すると考えられてきました)
そろそろ、白黒を明確にしてほしいなぁ と思います。
4.5.1 b. a robot visited the black tile.
これは、明確な変更点だと思います。「ロボットは黒のタイルに入ってはいけません」になりました。
「タイルに入る」は、4.4.4で定義されているように、ロボットの半分が入ることです。これは、審判としては判断がしやすくなったので、良いルール変更です。
4.6.1 To successfully identify a victim, the robot must stop within 15 cm a victim and blink an indicator which is visible to the referee for the full 5 seconds whilst being stationary.
2020年ルールでは、停止している5秒間、「音を鳴らす」が追加されたような・・・? でも、それは削除されたようです。
4.6.2
被災者発見の得点ですが・・・何故かマイナス点に見えてしまいます。(笑)
ハイフンの表示はやめてコロンにしましょうよ!
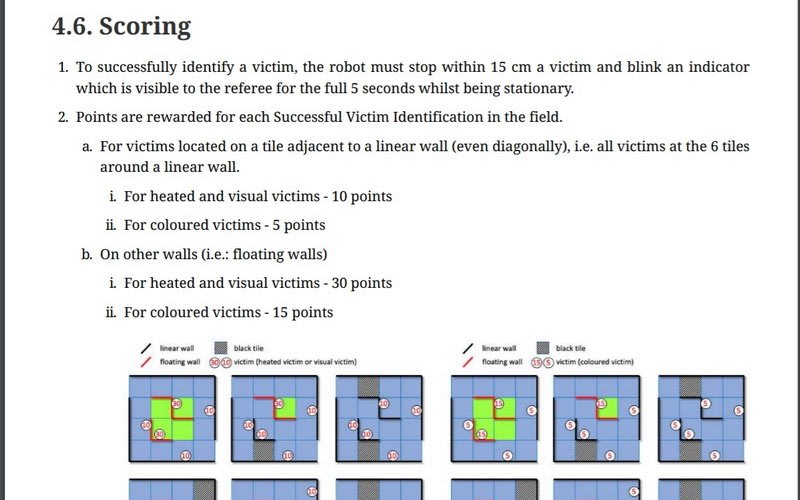
4.6.2の下の説明
The field designer must keep in mind this rule when deciding on the location of the black tiles
黒のタイルの位置のデザインについて、競技ごとの最大スコアが異ならないように(公平になるように)考えてね・・・という説明は良いのですが・・・同じように銀のタイルの場所もよく考えてほしいです。銀のタイルの設置場所によっては、再スタート時のロボットの方向を変えるだけで簡単に30点や15点がにとれてしまうことがありますので・・・
4.6.7 Successful Up or Down Ramp Negotiation. A robot is awarded 10 points for a successfully climbing up or down a ramp. The robot has successfully navigated through the ramp, when it moves from the bottom to the top tile (or vice versa), and is completely within the horizontal tile without toppling over.
傾斜路の上りと下りの得点ですが・・・同じ傾斜路は上りで下りでも一回通過したら得点(10点)で、それ以降は通過しても得点にならないと聞いたのですが・・・ルールの説明だとよくわかりません。
傾斜路は何度通過しても、最初の10点だけなのか? それとも、上りで10点、下りで10点の合計20点なのか?
もうちょっとはっきりして欲しいです。
4.6.8 Successful Stair Navigation. A robot is awarded 5 points for navigating a set of stairs in either direction. A successful navigation means the robot moves from the bottom tile to completely on the top tile of the stairs, then down to the bottom tile without assistance, reaching the subsequent tile after the stairs.
階段も、通過したら、5点なのか? 一番上の段にロボットが上って、また戻って別のタイルに入れば5点なのか? いまいちはっきりしません。
はい、こんなところでしょうか・・
続きの記事はこちら Rescue Line と Rescue Maze の 2021年ルール FINAL でたよ!






































