Rescue Line の方はルールを一通り確認しました。
じゃあ、肝心の Rescue Maze は・・・ほとんど変更がありません。
ですので、変更がある部分を見ていきたいと思います。
まず、最初の絵・・・やっと、変わりました。これまでは、一体いつの時代のルールの絵だよ、という感じでした。黒のタイルが行き止まりにしか無いし、シルバータイルも描かれていない・・・(苦笑)
じゃあ、それ以降の変更を見てみます。
1.4.1 Speed bumps are maximum height of 1cm. They are white and fixed at any angle to the floor.
床に設置されるスピードバンプは、どんな角度で設置されるかはわからないよ、通路に直角かもしれないし、平行かもしれないし、斜めかもしれない・・・
2.3.3 Students will participate in ONLY ONE (1) of the three (3) divisions: Primary Rescue Line, Secondary Rescue Line or Rescue Maze.
2.3.4 Eligibility for each division is:
・Primary Rescue Line: Open to students aged 14 years old and under. Age is calculated as of July 1 for the international RCJ event each year.
・Secondary Rescue Line: Open to students of any age up to and including 19 years of age. Team members may compete in Secondary Rescue twice at most (2 international events). After competing twice they must move to Rescue Maze.
・Rescue Maze: Open to students of any age up to and including 19 years of age.
2.3.6 Every team member can be registered in only one team, and every team can compete in only one RoboCupJunior league and division.
これは、Rescue Line のルールと同じです。
一つの競技にしか参加できないことと、Rescue Line のセンカンダリとして2回国際大会に参加したチームメンバーはその後は Rescue Maze に参加することになります。
2.4.2 It is highly unlikely that a team will be able to legally use a robot identical to another team’s robot from previous years, or use a robot that is identical to another team’s robot.
2.4.6 All teams must fill a web form that will be provided once the team is officially registered, and should be submitted at least one week prior to the competition. The purpose of this document is to allow judges to be better prepared for the interviews. For sample documentation, please refer to the "Description of Materials Template" at the official RCJ website under Rescue rules. Information about how to submit your document will be announced prior to the competition to the teams.
ここも、Rescue Line のルールと同じです。(過去を含めて)他のチームと同じロボットでは参加できません。それから、事前に提出する資料が有る場合は、ちゃんとやってね、ということです。
3.5.1 Successful Victim Identification. Robots are rewarded points for each Successful Victim Identification in the arena:
a) 10 points per "victim" located at a tile adjacent to a linear wall (even diagonally), i.e. all victims at the 6 tiles around a linear wall.
b) 25 points per "victim" at other walls.
In the above diagram, red lines mean floating walls while the green ones represent linear walls. Note that some of the victims on the floating walls are worth 10p, this is because the 10p victims are located in a tile near a linear wall. The colors on the diagram are just for illustrative purposes.
To identify a victim, a robot must stop within 15 cm of the victim while flashing a lamp on and off for five seconds, and/or release a Rescue Kit before moving on. When a robot completes both, it counts as one victim identification and one rescue kit deployment (see below).
やっと、変更らしい変更がでてきました。
被災者の得点です。これまで、25点の被災者の考え方(判別の仕方)が良くなかったのですが、やっと是正されました。
a) 外壁に接続する壁(linear wall)に(斜めも含めて)隣接しているタイルの被災者を発見すると10点の得点になります。それは外壁に接続する壁の周りの6つのタイルに当たります。
b) その他の場所の被災者を発見すると25点の得点になります。

上の図の中で、緑色は外壁に接続する壁(Linear wall)を、赤い線は外壁に接続しない壁(floating walls)を意味します。 外壁に接続しない壁の被災者のいくつかは 10点の得点であることに注意してください。これは10点の被災者が外壁に接続する壁に隣接するタイルにあるからです。 図の色は、ちょうど説明用です。
まあ、こんな感じでしょうかねぇ。
長い(短い)レスキューBの歴史の中で・・・最初は迷路の経路自体が1本しかありませんでした。だから片手法で進むだけで被災者を全員発見することが可能でした。しかし、だんだんとルールが高度化して、経路が複数になり、迷路の中に浮島ができるようになりました。こうなると、片手法で進むだけでは浮島の中の被災者は発見することができません。発見することが難しい被災者は高得点にしよう、ということで10点と25点に分かれました。
しかし、2014年ルールでは、きちんと整理されておらず、「片手法で行ける場所なのに25点」というサービス被災者が存在しました。2015年ルールではやっとそれが是正されました。
ルールの表現は分かりにくいですが、「片手法で見つかる被災者は10点、片手法で見つからない被災者は25点」ということです。
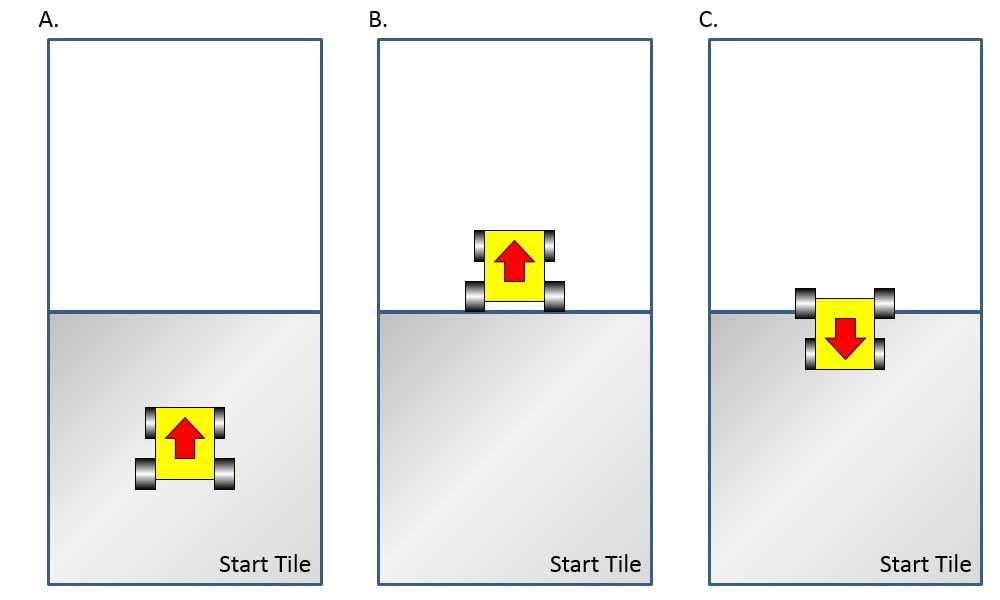
3.5.5 Successful Up Ramp Negotiation. A robot is awarded 20 points for a successful climb of the ramp. To successfully climb up the ramp, a robot needs to move from the bottom horizontal tile before the ramp to the top horizontal tile after the ramp.
上りの傾斜路の得点です。下の踊場から上の踊場にロボットが進めれば得点です。表現をより明確にしただけで、実質的には変わりません。
3.5.6 Successful Down Ramp Negotiation. A robot is awarded 10 points for successfully landing at the bottom of the ramp. A robot needs to move from the top horizontal tile of the ramp to the bottom horizontal tile of the ramp. A successful landing means that the robot can leave the tile without assistance.
こちらは、下りの傾斜路の得点です。表現の明確化は上と同じですが・・・最後の文章が追加されました。これまでは、ロボットが「上の踊場から下の踊場に移動できれば得点」でした。だから、ロボットが転がり落ちても、下の傾斜路に半分以上入れば得点になりました。しかし、2015年ルールでは、(転がり落ちても良いとは思いますが・・・)下の踊場のタイルを自力で抜けられる状態で無いと得点になりません。(早い話、ちゃんと走って下らないとダメ)
leave the tile の tile は下の踊場のことを指すと思うのですが・・・ちゃんとロボットが走ってしたの踊場までは進めたが、そこで下の踊場から出られない状態になった場合、得点は入るの入らないの!? 下の踊場まで走ってくれば「得点」ですよね。
4章以降も変更は Rescue Line と同様のようなので省略します。