今回のお題は「得点」です。
3.5.1 Successful Victim Identification. Robots are rewarded points for each Successful Victim Identification in the arena:
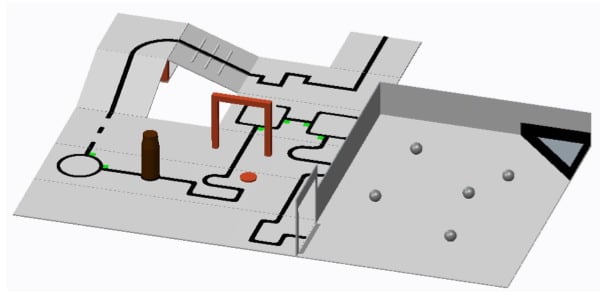
a) 10 points per "victim" located at a tile adjacent to a linear wall (even diagonally), i.e. all victims at the 6 tiles around a linear wall.
b) 25 points per "victim" at other walls.

In the above diagram, red lines mean floating walls while the green ones represent linear walls. Note that some of the victims on the floating walls are worth 10p, this is because the 10p victims are located in a tile near a linear wall. The colors on the diagram are just for illustrative purposes.
To identify a victim, a robot must stop within 15 cm of the victim while flashing a lamp on and off for five seconds, and/or release a Rescue Kit before moving on. When a robot completes both, it counts as one victim identification and one rescue kit deployment (see below).
3.5.2 Successful rescue kit deployment. Robot should drop a rescue kit on the tile where the victim is, and the deployment point needs to be within 15 cm proximity of the victim. The robot is awarded 10 points per successful rescue kit deployment. There are no extra points for multiple kit deployments per victim.
3.5.3 Reliability Bonus = the number of ‘successful victim'
identification" x 10 + the number of ‘successful rescue deployment’ x 10, minus the number of ‘Lack of Progress’ x 10. However, Reliability Bonus score can only be reduced down to the minimum of 0 points.
3.5.1 被災者の発見
ロボットがアリーナに設置された被災者を発見した場合に得点になります。
a) リニア壁に隣接する6枚のタイルにある被災者は10点の得点
b) 他の壁にある被災者は25点の得点
上記の図の中で、緑色がリニア壁、赤色がフローティング壁を表します。フローティング壁にある被災者のいくつかが10点の得点である点に注意してください。これら10点の被災者はリニア壁に隣接するタイル上に配置されているからです。(ただし図の色は説明用です。)ロボットが被災者の15cm以内に停止して5秒間ランプを点滅します、または動き出す前にレスキューキットを落とすと被災者の発見になります。ロボットが両方できれば、被災者の発見とレスキューキットの配布(下記参照)に成功したことになります。
3.5.2 レスキューキットの配布
ロボットがレスキューキットを被災者から15cm以内に落とすことができたらレスキューキットの配布が成功したことになり得点になります。レスキューキットの配布に成功したら10点の得点です。一つの被災者に複数のレスキューキットを配布しても追加得点にはなりません。
3.5.3 信頼性ボーナス。
信頼性ボーナスは、「発見した被災者の数」×10+「配布したレスキューキットの数」×10-「競技進行停止の数」×10 点です。
信頼性ボ-ナスは0点未満(マイナス点)にはなりません。
こんな感じでしょうかねぇ。
長いので、とりえあず2つに分けました。
ここは2015年ルールからの変更はありませんね。
ただ、3.5.1のb)の説明
b) 25 points per "victim" at other walls.
の最後は wall ではなく tile が正しいと思うのですが・・・
で・・・2015年ルールから変更が無いので、そのままなのですが・・・
この得点の部分が、あんまり明確でありません。
被災者の得点は以下の2つの場合です。
①ロボットが被災者からの距離が15cm以内に停止して、5秒間ランプを点滅した
②ロボットが被災者からの距離が15cm以内に停止して、レスキューキットを落とした
3.5.1に書かれている 「and/or」が、何と何を接続しているかというと
flashing a lamp on and off for five seconds と release a Rescue Kit を並べていると考えます。だから、 a robot must stop within 15 cm of the victim と before moving on は共通になりますね。
最初に、このルールを読んだ時に、①だけで良いじゃない、何で②が必要なの!? と質問したら、「ランプを装備していないロボットもあるから・・・」という回答でした。これがあるから、ルールが複雑怪奇になっていると思うのですが・・・
日本の大会に参加しているロボットは、①のロボットがほとんどだと思います。(それしか見たことがありません。)被災者を発見したら、「停止」「5秒間ランプを点滅」「レスキューキットを落とす」「探索再開」・・・「花鳥風月」のロボットは、こんな動きでした。でも、2014年と2015年の動きは微妙に変えていました。
2014年の動き
被災者を発見、「停止」「5秒間ランプを点滅」「45度回転」「レスキューキットを落とす」「45度回転」「探索再開」・・・
2015年の動き
被災者を発見、「停止」「45度回転」「5秒間ランプを点滅」「レスキューキットを落とす」「45度回転」「探索再開」・・・
違いが判りますでしょうか・・・ランプの点滅とレスキューキットを落とす間にロボットを動かなくしました。何故かというと ルールの before moving on が心配だったからです。被災者を発見して、発見の動作(アピール)をした後に、そのまま動かずにレスキューキットを落とせば、文句の付け様がないだろう・・・と考えました。(まあ単純に、停止して5秒間ランプを点滅すれば文句は言われないでしょう)
私が問題だと思うのは・・・
被災者発見、「停止」「ランプの点滅開始」「回転」「レスキューキットを落とす」「ランプの点滅終了」「探索再開」・・・
というように、ランプの5秒間の点滅の間にレスキューキットを落とすロボットがあることです。ロボットが動かずにレスキューキットを落とせるのであれば問題ありませんが、レスキューキットを落とすために回転をするのは、「5秒間の停止」が達成されません。だから、①での得点はできずに、②で得点することになりますね。
でも、どうも、ここら辺が、はっきりしていません。
さらに・・・
3.5.2 には、レスキューキットの配布の得点が記載されています・・・これまでは、被災者の発見が成功していなくても、レスキューキットの配布に成功したら、10点の得点が得られました。つまり、3.5.1 と 3.5.2 は独立して得点になりました。しかし、競技の運営者の中には、「被災者を発見したからこそ、レスキューキットを配布できる訳で、被災者を発見していないのにレスキューキットの得点が入るのはおかしい」という意見もあります。2016年ルールで追加された Summry で earn an additional 10 points と書かれているので、被災者発見に追加点が入る という解釈も成り立ちます。
ここらへんは、再度確認した方が良いのかなぁ・・・
きっと、こんな、面倒なことを考えるのは、日本人だけです・・・