前輪の変形は、何となく形が見えてきたので、現在可動用の試作品を造って位置取りや可動域をチェックしています
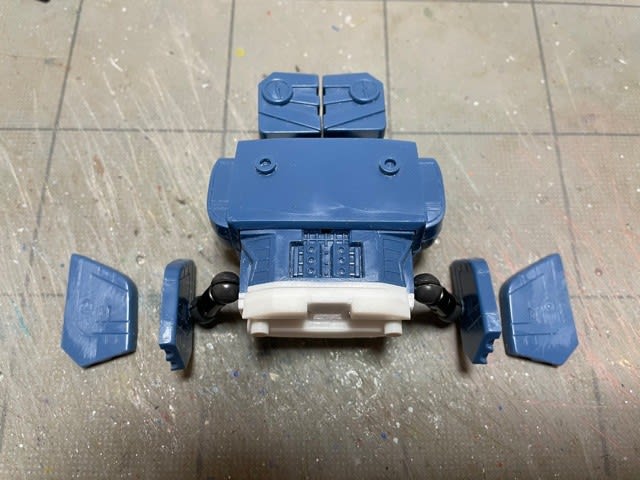
後輪は大体の形が決まりましたので、取り付けて状態を確認しています
 スキッパーの後輪としての位置から、合体時の腰の位置まで移動させるとなると、結構な距離と可変が必要になります
スキッパーの後輪としての位置から、合体時の腰の位置まで移動させるとなると、結構な距離と可変が必要になります
可動用の軸を隠すとなると、サイドアーマーや腰の可動を止める事になるので、どうしても外側に配置する事になってしまいます。
出来れば合体シーケンスの再現も考えて、腰の回転時は胴体から離したいので、多関節が必要になってきます。
 取付位置は、回転用に造った腰パーツの上のブロックになっています
取付位置は、回転用に造った腰パーツの上のブロックになっています
二つの可動軸を、長めのポリパーツで繋いでいますので、どの位置へでもフレキシブルに動きます。
後輪ブロックへの接続は、キットの軸位置を使用せずに、車輪の回転軸の位置に新たに設けました。
 これがスキッパーの車両形態の時の位置になる予定ですが、前輪が決定するまでは仮の位置になります
これがスキッパーの車両形態の時の位置になる予定ですが、前輪が決定するまでは仮の位置になります
先に後輪を造ったのは、多重関節で造る予定だったので、後で前輪に合わせるのが容易だと考えたからです。
この段階で気が付いたのですが、可動用のポリパーツの直径と、車輪の軸の直径が近かった為、車輪の回転時に軸が破損しそうなので、車輪は固定にする予定でいます。
 こちらが飛行形態時の位置になりますが、これも前輪決定時に再調整します
こちらが飛行形態時の位置になりますが、これも前輪決定時に再調整します
ここまで見て分かると思いますが、後輪ブロックの移動位置と角度変化が、結構大変なので、可動軸を現状から変更する事は無いと考えています。
当初プラ棒と真鍮線で、試作品を造って可動させてみたのですが、2~3回可動させて位置確認をした段階で緩み始めたので、どの位置でも安定するように大型化しました。