








●本日午前7時曇り 16.3℃ 寒い 少し晴れ間があります。 ③
16.3℃ 寒い 少し晴れ間があります。 ③
 【梅】青梅の季節になりました。梅干し漬け、梅酒、梅ジュース。塩で一夜漬けにしてカリカリ食べる方法もあります。「南高梅」という種類の梅を知人から10㎏いただきました。
【梅】青梅の季節になりました。梅干し漬け、梅酒、梅ジュース。塩で一夜漬けにしてカリカリ食べる方法もあります。「南高梅」という種類の梅を知人から10㎏いただきました。
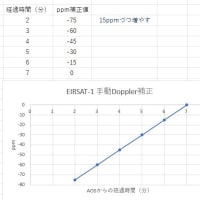
 【動作テスト】降ろしたローテーターをシャックに持ち込んで、ケーブルを窓から引っ張り入れて動作テスト。CALSAT32が表示しているAz、Elの数値とアンテナコントロールパネル(ローテーターが向いている数値)の数値が合いません。ピタリ合う方がおかしいのですが、仰角ローテーターで最大で4°∠ずれています。夕べかなりの時間を掛けてチェックしましたが、もう少しチェックと調整をして見る予定です。飛来している衛星を追尾して見ると、ローテーターというのもかなり面白い動きをしていることが分かります。その一つ、ずれが大きくなった場合、小刻みでなく連続で動く場合があるのです。それはすなわち最大仰角付近であり、つまり最大仰角付近では衛星の動きが見かけ上早いということの証拠です◆グリースの塗布は終わりました。かなり粘性の高いものです。塗布した後、円周の皿を逆さにしても球が落ちませんでした。本体はあらためて手元で見ると大きく頑丈です。仰角ローテーターの方が大きい感じ。
【動作テスト】降ろしたローテーターをシャックに持ち込んで、ケーブルを窓から引っ張り入れて動作テスト。CALSAT32が表示しているAz、Elの数値とアンテナコントロールパネル(ローテーターが向いている数値)の数値が合いません。ピタリ合う方がおかしいのですが、仰角ローテーターで最大で4°∠ずれています。夕べかなりの時間を掛けてチェックしましたが、もう少しチェックと調整をして見る予定です。飛来している衛星を追尾して見ると、ローテーターというのもかなり面白い動きをしていることが分かります。その一つ、ずれが大きくなった場合、小刻みでなく連続で動く場合があるのです。それはすなわち最大仰角付近であり、つまり最大仰角付近では衛星の動きが見かけ上早いということの証拠です◆グリースの塗布は終わりました。かなり粘性の高いものです。塗布した後、円周の皿を逆さにしても球が落ちませんでした。本体はあらためて手元で見ると大きく頑丈です。仰角ローテーターの方が大きい感じ。


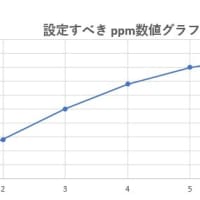
 【ローテーターの角度調整】テキストにその角度の電圧をプロットして、調整します。プロットか所が多いほど正確になるとは思っていますが、実際にピタリ合わせるのは無理があります。G-5500のマニュアルには次のように書いてあります。
【ローテーターの角度調整】テキストにその角度の電圧をプロットして、調整します。プロットか所が多いほど正確になるとは思っていますが、実際にピタリ合わせるのは無理があります。G-5500のマニュアルには次のように書いてあります。
◆ボリュームの抵抗値、ケーブルの抵抗値の原因で0Vからスタートさせることが出来ませんので、コンピュータ制御などでこの誤差が問題になる場合は、プログラムにより差し引いて下さい。
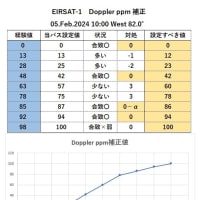
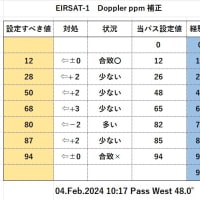
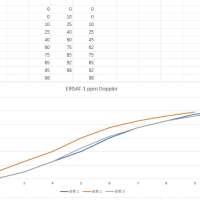
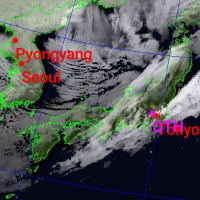
 【ローテーター制御の誤差と精度】JR1HUO相田さんのHPから引用◆↓これが最大のポイントだと思っています。特に下線部分◆画像は本日11日11:17のSO-50を机上で追ったもの。2.0~2.5度の誤差 これくらいでは許容範囲か
【ローテーター制御の誤差と精度】JR1HUO相田さんのHPから引用◆↓これが最大のポイントだと思っています。特に下線部分◆画像は本日11日11:17のSO-50を机上で追ったもの。2.0~2.5度の誤差 これくらいでは許容範囲か
CALSAT32でアンテナを自動制御した場合の誤差を考えるときには、いくつかの点について考慮しなくてはなりません。 ソフト的には制御誤差許容範囲を1度から9度まで1度単位で設定することができます。 通常、V・UHFではアンテナのビーム幅との関係から5度程度(初期設定値)に設定すればほとんどの場合で問題ありません。 1度程度に設定することもできますが、低軌道の衛星では衛星の動きが早いため、小刻みな制御が頻繁に発生します。 一方、高軌道の衛星では衛星の動きは多くの時間でゆっくりしているため、制御の頻度は少なくなりますが、高い周波数のビーム幅が狭いアンテナでは1度以下の制御誤差で制御したい場合もあります。 CALSAT32に使っているPICNICのA/Dコンバータは10bitの精度で、その入力電圧範囲は0~5Vです。 この入力電圧をフルに利用した場合0.3~0.4度の分解能が期待されます。 しかし、物理的なローテータの回転角度と電圧出力が直線的にすべての角度で一致するか。 角度を示す電圧値の安定度。 雑音などの影響。 ローテータのバックラッシュなども大きな誤差要因になります。 これらの影響をできるだけ取り除き、ローテータの回転速度が最適化された場合の制御限界はまだ見えていませんが、1度より小さい値も可能なのかもしれません。 しかし、観測点の位置設定。 時計のずれ。 軌道要素が古い等があると計算値そのものの精度が低下しますので、0.5度以下の精度を実現することは大変なことで、自動制御+手動による微調整が必要にな ると思います。










※コメント投稿者のブログIDはブログ作成者のみに通知されます