








今週末の12月1日(土)、2日(日)に東京お台場の日本科学未来館で開催されるMaker Faire Tokyo 2012に、当工房も出展します(ブースA-5・A-6)。
イベント初日である12月1日(土)の12:30より、会場3階のサイエンスライブラリーにて、参加者のトップをきって約20分間のプレゼンテーション・デモンストレーションを行います。そのプレゼン資料ができあがりましたので、ティーザー予告として表紙だけアップ。初日にご来場の節は、ぜひ当方ブースおよびプレゼンにお立ち寄りください。

今週末の12月1日(土)、2日(日)に東京お台場の日本科学未来館で開催されるMaker Faire Tokyo 2012に、当工房も出展します(ブースA-5・A-6)。
イベント初日である12月1日(土)の12:30より、会場3階のサイエンスライブラリーにて、参加者のトップをきって約20分間のプレゼンテーション・デモンストレーションを行います。そのプレゼン資料ができあがりましたので、ティーザー予告として表紙だけアップ。初日にご来場の節は、ぜひ当方ブースおよびプレゼンにお立ち寄りください。
Make: Tokyo Meeting改めMaker Faire Tokyo 2012の開催がいよいよ来週12月1日(土)に迫りました。会場は東京お台場の日本科学未来館です。
当工房も、お仲間の超小型飛行体研究所さんと仲良く机を並べて出展します。出展位置は会場1階企画展示ゾーンのA-5・A-6です(下記レイアウト図参照):
また、初日開幕直後の12:30より、会場3階のサイエンスライブラリーにて、参加者のトップをきって約20分間のプレゼンテーション・デモンストレーションを行います。当日ご来場の節はぜひご聴講いただけましたら幸いです。
展示およびプレゼンコンテンツについては、目下鋭意準備中です。お楽しみに!

3週間後に迫ったMaker Faire Tokyo 2012に向け、会場で展示予定の新作機の調整のため、雨をついて11/11のIAC-ASOに参加してきました。

当日の全体の感じは、例会の主催者である超小型飛行体研究所さんのブログと動画でうまく要約されていますのでぜひどうぞ。本当に何年かぶりといってもいい羽ばたき飛行機だらけの飛行会でした。
当方のカメラで撮った映像もFLAPPINGWINGのYouTubeチャンネルにアップしていますので合わせてご覧ください。
新作機であるFlying CrawlerとFlaptterの動画はこちらです:
Flying Crawler(画像クリックで動画にジャンプ):
Flaptter(画像クリックで動画にジャンプ):
小型羽ばたき飛行機の開発に関して、当工房では、思いつくまま楽しみながらを旨としてマイペースで取り組んでいるが、海外、とくに北米では、政府の支援も得ながら、大学等の研究機関で組織的な取り組みが進んでいる。とくに目に付くプロジェクトを紹介:

ハーバード大学ではさまざまな形状のマイクロロボットが研究されているが、数年前から、RoboBeesと称する昆虫型の極小羽ばたき機の開発が続けられている。
これまでのところは、外部給電によるテザード・フライトのステージにとどまっているようだが、最終的には、数ミリメータサイズの機体に各種センサ・プロセッサを搭載して自律飛行可能な機体を実現しようとしている模様。
Harvard Microrobotics LabのYouTubeチャンネル
その2:Robot Dragonfly by TechJect Inc.


今週のgizmagの記事で詳しく紹介されている、筆者的には目下一番注目のプロジェクト。その名の通りトンボのような4枚翅を自在に羽ばたかせ、空中停止や宙返りなどの機動を行える、手のひらに載るサイズのハイテク飛行ロボット。ジョージア工科大学のメンバーにより、米空軍からの百万ドルの資金援助も得ながら4年間にわたって開発が進められてきた。すでに開発と量産化のためのベンチャー企業TechJect Inc.が設立されており、今流行りのクラウド・ファンディングによって量産化資金も確保したうえで、各種の量産型機体を2013年中に発売予定とのこと!(予約受付中^^)
実は当工房でも、ほぼ同様のデザインの機体の開発に着手しようとしていた矢先のことで、完全に先を越された感じ。脱帽!
新作FLYING CRAWLER(フライング・クローラ)の屋外フライトの映像をアップ。
撮影途中で機材に不具合が生じたため、短時間の映像ですがあしからず~
(画像クリックで動画にジャンプ):

来月開催のMaker Faire Tokyo 2012に向けた新作。
一見すると近作のフライング・モビルによく似ていて、多数の羽ばたき翅が縦に並んでいるが、フライング・モビルでは左右の翅がリジッドに結合しており各翅が交互にツイスト運動を行っていたのに対し、このフライング・クローラは、左右の翅が各々独立したヒンジをもっており、だいたい左右対称に羽ばたく。
ここであえて「だいたい」と書いたのは、各翅の羽ばたきが常に左右対称ではなく、左右別々のモータにより羽ばたきレートを独立にコントロールでき、これにより左右の操向を行う仕組みになっているから。




2モータによる羽ばたき飛行は、当工房でも数年前に試作を行ったことがあるが、その後発展することもなくお蔵入りしていた。最近になって、超小型飛行体研究所のとしちゃんが、タンデム配置の多葉羽ばたき機を2モータ制御で安定飛行させるのに見事に成功したのを知り、がぜん興味が盛り返して、追試というか発展形として取り急ぎ製作したのがこのフライング・クローラということになる。
としちゃんの機体は当初6枚翅(2X3WING)、次いで中間の2枚を除いた4枚翅デザイン(6ー2=BUG)だったが、フライング・クローラは、180°位相で交互に羽ばたく4連8枚の翅を、同形だが羽ばたかない前後の固定翅ではさんでいるので、計6連12枚翅ということになる。なお、動翼は機軸方向に横並びに配置した左右2本の長いクランク・シャフトで駆動している。



肝心の飛行性能については、まだ広い場所でのテスト・フライトを行えていないが、室内での予備試験では大変安定して飛びそうな感触。研究所ブログで報告されている画期的な発見、2モータ羽ばたき機の共振効果(下記)は、この機体でも見事に発現している。
「羽ばたき飛行機の左右の羽の羽ばたき周波数を変えることで、旋回しているわけですが、左右の羽ばたきタイミングのシンクロは共振により自然と行われ、飛行姿勢が暴れることはありません。
実際直進時も左右の羽ばたきを電子的にシンクロしているのではなく、機体全体の共振により、自然と左右の羽ばたきがシンクロするので飛行姿勢が乱れることがありません。」(超小型飛行体研究所ブログ2012年10月15日記事より抜粋)
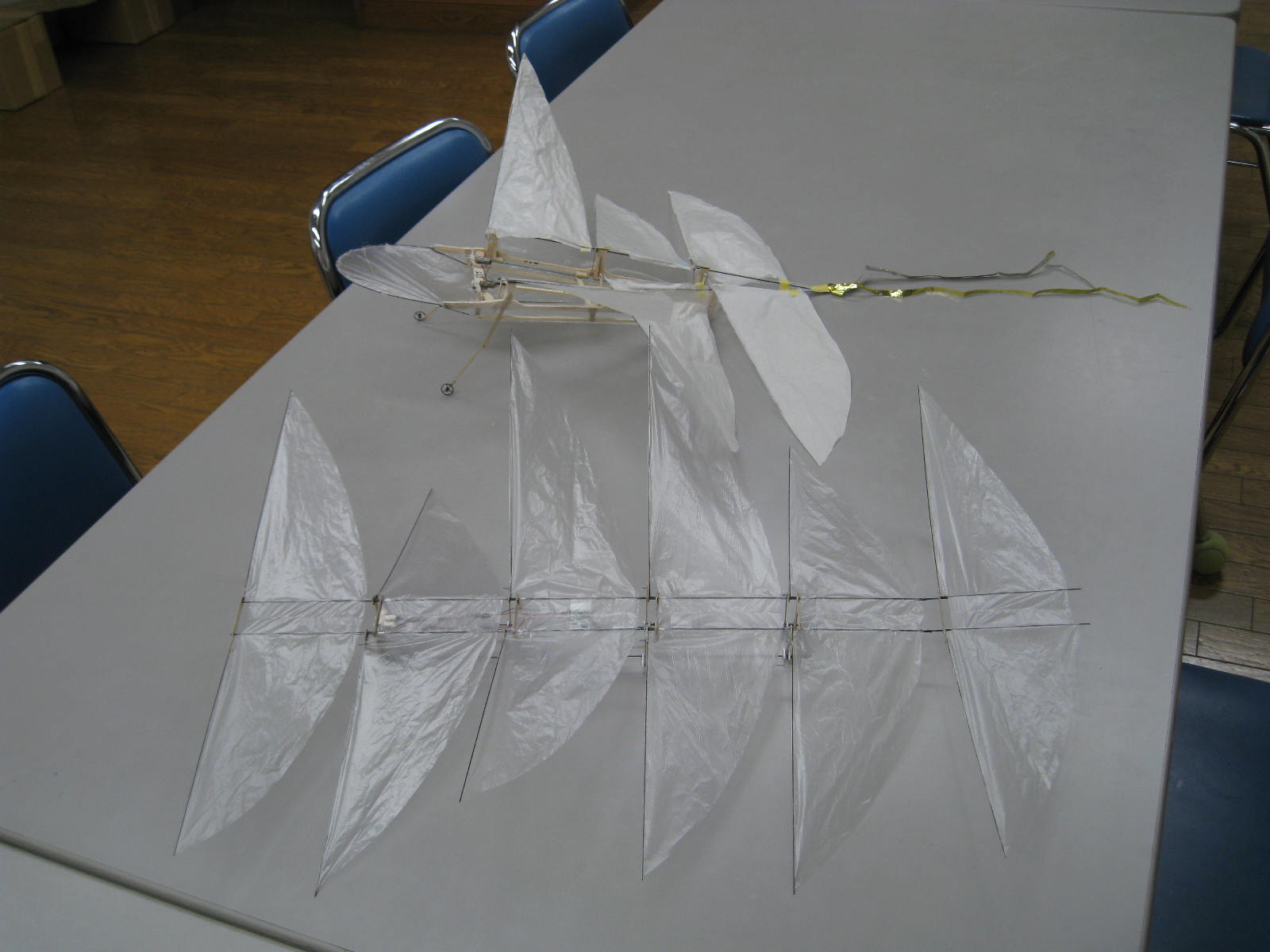
以下の写真は翼面を張る前のスケルトン状態のショット。機体構造がよくわかる。



近日中に飛行会に持ち込んで十分なテストを行いたい。
ちなみに当機のネーミングは、工事車両や戦車などに見られる無限軌道(トラックもしくはクローラ。本機同様、左右の軌道の回転差によって操向を行う。しばしばキャタピラと称されるが、これは同名の企業の商標)に由来している。
| 機体スペック |
| 全幅 430mm |
| 全長 600mm |
| 飛行重量 17.8g |
| (50mAhLi-po電池含む) |
|
製作年月 2012年11月 |
2012/11/05追記:
室内で天井から吊り下げて羽ばたき動作の様子を撮影した動画をアップ
(下の画像クリックで動画にジャンプ):
