先日金沢21世紀美術館で行われたワークショップで、参加者に「羽ばたき飛行の歴史」についてかんたんな説明をしたのだが、その中で「有人羽ばたき飛行の試みはまだ成功していない」と話してしまった。実はこれは正しくない。実用化されたり広く認知されていないだけで、人力/動力とも、有人飛行に成功した記録がある。インターネット上では最も充実した羽ばたき飛行機の専門サイトであるThe Ornithopter ZoneのWhat's Been Doneセクション、Manned Ornithopter Flights の項で、これまでに成功した有人羽ばたき飛行の記録について詳しく紹介されている(英文)。ここではその要約を掲載する。
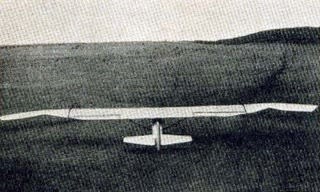
Alexander Lippischの人力羽ばたき機
Alexander Lippischは、20世紀前半に活躍したドイツの高名な航空工学者で、第二次大戦中に世界初の実用ロケット機Me-163の機体デザインを行ったことなどで知られている。
戦前、Lippischはエンジンなどの動力に拠らない人間の筋力による飛行(人力飛行機)の可能性に関心をもち、数々の実験を行った。彼が、人力を効果的に飛行のための推力に変換する方法として選んだのが羽ばたき翼であった。
1929年、Lippischは、彼の製作した実験機(グライダーのような大きな固定翼と、プロペラ代わりの小さな羽ばたき翼をもったハイブリッド・デザインだったとされる)に、若く体力のあるテストパイロットを乗せて、トウ・ランチ(牽引による発進)による飛行テストを行った。テストでは実験機は300メートル近くの距離を飛んだとされるが、当時の詳しい記録が残されていないため、これが真の羽ばたき飛行だったのか、それとも滑空の延長に過ぎなかったのか、判定が分かれて決着していない。

その後も、現代に至るまで人力による羽ばたき飛行の試みは散発的に行われているものの、じゅうぶんに成功したといえる例はまだない模様である。
戦後、人力飛行機の開発は大きく進展し、CADや新素材の活用により、数十キロメートルもの航続距離をもつ機体も出現しているが、これらは推進装置として羽ばたき翼ではなく、大型のプロペラを使用している。
Adalbert Schmidの動力羽ばたき機
Adalbert Schmidは、前述のLippischと同時期に活動したドイツの航空エンジニア。Lippisch同様の人力羽ばたき飛行から始めたが、次のステップとして、機体に小さなオートバイ用の内燃エンジンを取り付けて動力源とすることで、十数分に及ぶ定常飛行を成功させた(1942年)。彼の機体は、やはりLippisch同様、大きな固定翼と、小さな羽ばたき翼をもったハイブリッド・デザインだった。


戦争による中断の後、Schmidは1947年にも、市販のグライダーを改造した羽ばたき飛行機を製作したが、資金難のためその後の開発は途絶してしまった。
Vladimir Toporovの人力羽ばたき機
ロシアのVladimir Toporovと彼の研究グループは、1990年代中盤に、独自のデザインによる人力羽ばたき機の実験を行った。彼らの羽ばたき機もじゅうぶんな飛行距離を達成することはできなかったが、2枚ではなく4枚の翼を駆動することで、2枚翼の羽ばたき機にみられる振動の問題を改善していた。今後の有人機開発の参考になる成果である。

Yves Rousseauの人力羽ばたき機
フランスのYves Rousseauは、ウルトラライトプレーンの分野で数多くの世界記録をもち、自ら機体のの開発も行って成功したが、1995年以降、人力による羽ばたき飛行に取り組んだ。市販のウルトラライトプレーンを改造した機体で、2006年には64メートルの距離を飛行するに至ったが、不幸なことにRousseauはテスト中の事故で重傷を負い、その後の取り組みは中断してしまった。

トロント大学の動力羽ばたき機
カナダのトロント大学の航空工学研究所(UTIAS)のJames DeLaurier教授に率いられた研究チームは、2006年、推進補助用のジェットエンジンを備えた動力羽ばたき機UTIAS Ornithopter No.1を初飛行させた。機体は横風にあおられて大破してしまったが、飛行距離は約300メートル、滞空時間は14秒だった(YouTubeに動画あり)。

日本の人力羽ばたき機
鳥人間コンテストへの度々の出場で有名な京都大学鳥人間チームShooting StarsのOBが中心となり1993年に設立されたSilver Shooting Starsが製作した人力羽ばたき機「迦楼羅(かるら)」。残念ながら本格的な飛行テストを開始する前に開発が中断している(関連ホームページ)。

以上の例から、ライト兄弟による固定翼機による動力飛行成功後は、有人羽ばたき飛行の試みはそれほど多くはなく、また必ずしも大きな成功を収めていないことがわかる。大量・高速輸送などの商業的な応用が見込めず、財政的なサポートが得られにくいことも背景にあると思われる。一方、スポーツ航空の分野ではまだ見込みがありそうなので、今後あらたな取り組みが期待される。
また、上記の例のうち最も成功したと思われるAdalbert Schmidの機体は、大きな固定翼を兼ね備えたハイブリッド・デザインであり、純粋な羽ばたき機といえるのかという議論もある。これに対しては、自然界には鞘翅目の昆虫(いわゆる甲虫類)のように、飛行中、湾曲した甲羅のような前翅(鞘翅)を拡げ、あたかも固定翼のように使用している例もあるという事実が、反例としてあげられるかと思う。

ひとことで羽ばたき飛行といっても、さまざまなバリエーションがあり、有人飛行のためにはどの方式が最適なのか、まだまだ研究が必要かと思われる。
参考:
The Ornithopter Zone 「Manned Ornithopter Flights」(http://www.ornithopter.org/manned.shtml)
Wikipedia「Ornithopter」
(http://en.wikipedia.org/wiki/Ornithopter)
Academic dictionaries and encyclopedias「Ornithopter」
(http://en.academic.ru/dic.nsf/enwiki/197131)