









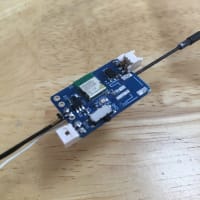
ピッチ方向の姿勢制御に問題のあったスカイ・フィッシュを、3CH仕様に改良。 元々方向制御をテールロータで行っているが、今度はエレベータの機能をもつロータを機首に追加した。 使用しているIRX3受信機は、ラダー出力は40オーム以上なのでテールロータ用のMK04-40モータを直接駆動できるが、エレベータ出力は60オーム以上指定なので、そのままではモータを回せない。そこで、電子回路に詳しい永野さんやIRX3の設計者tokoさんにアドバイスを仰ぎ、エレベータ出力の先にFETをつないで、抵抗値の小さいモータを駆動できるようにした。ここでは十分なパワーが欲しいので、MK04-10モータをつないでいる。減速比はテールローターと同じ9:60。ローター直径は140mm。 本来この仕様でロータの正逆転を可能にするにはHブリッジ回路が必要だが、今回は機首下げからの回復ができればいいのでエレベータアップ方向のみ作動するようにした。これならFETは1個で済む。 さっそくテストしてみたところ、追加した機首ローターの効きはバツグン。旋回時、機首下げ気味になったときすばやくエレベータスティックを引くと、ぐわっという感じで姿勢が上向きに回復する。調子こいてそのまま引きっぱなしにするとたちまち機体が棒立ちになって失速するので、操作はホドホドにしておく必要がある^^; この改良により、全備重量は11.8gに増加(50mAhLi-po電池含む)。また、前後のロータの回転面を含む全長は900mmに達する。巨大!
| 機体スペック |
| 全幅 280mm |
| 全長 900mm |
| 飛行重量 約11.8g |
| (50mAhLi-po電池含む) |
| 製作年月 2007年3月 |









{kind=link}
※コメント投稿者のブログIDはブログ作成者のみに通知されます