









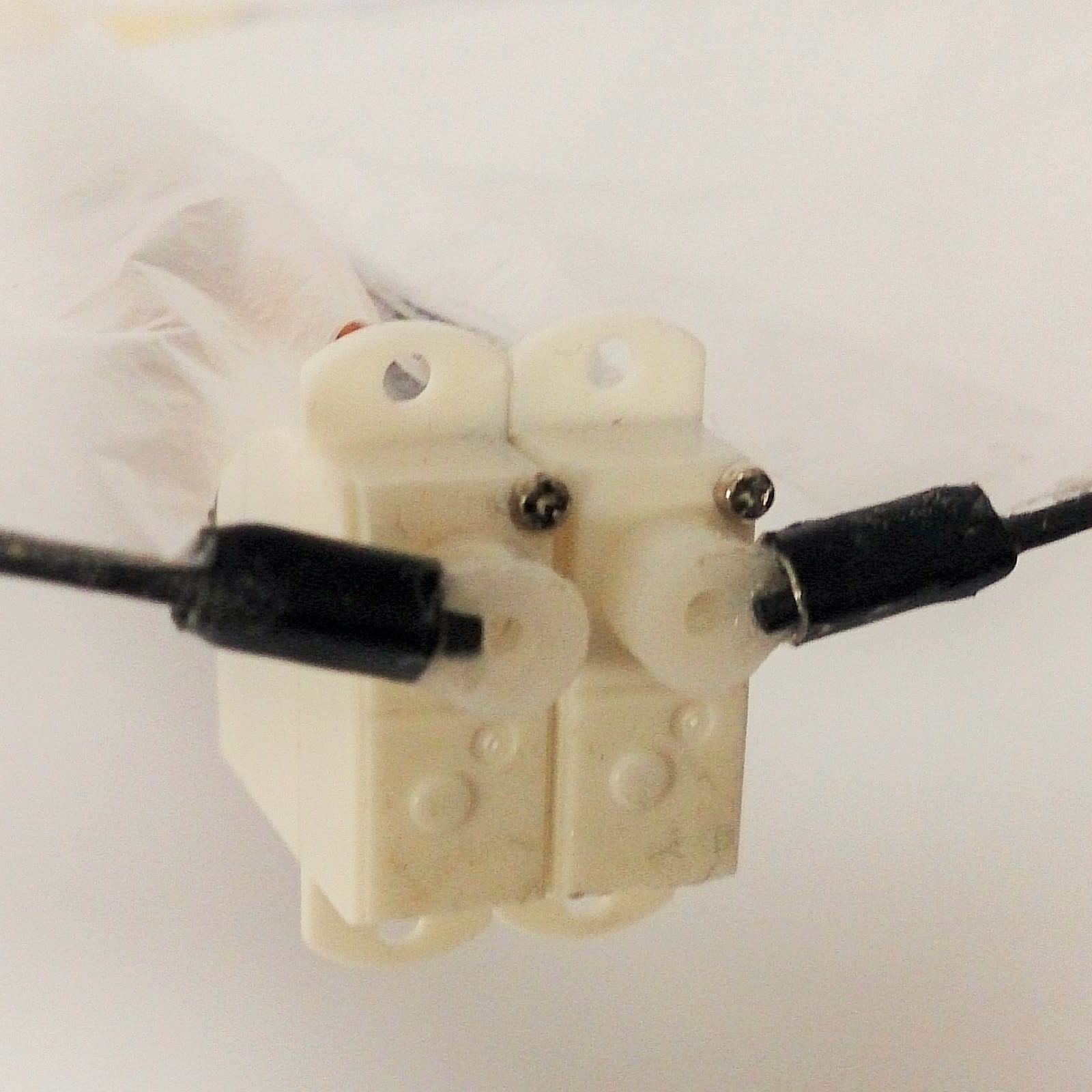
試してみたいとかねがね思っていたサーボダイレクトドライブ型羽ばたきメカにトライしてみました。
この方式は、海外でいくつかの前例があります。
とくに、当ブログの3月の記事でも紹介したFESTO社のeMotionButterfliesは、羽ばたき機構だけでなく群れを組んでの自律飛行などさまざまな新機軸を盛り込んでおり、目をみはらされます。
今回はコンセプト実証ということで、試作対象を羽ばたき機構のみにしぼりました。その代り当工房の流儀に従い、上記の先輩機達に比べ大幅な軽量化をはかりました(飛行重量9グラム)。
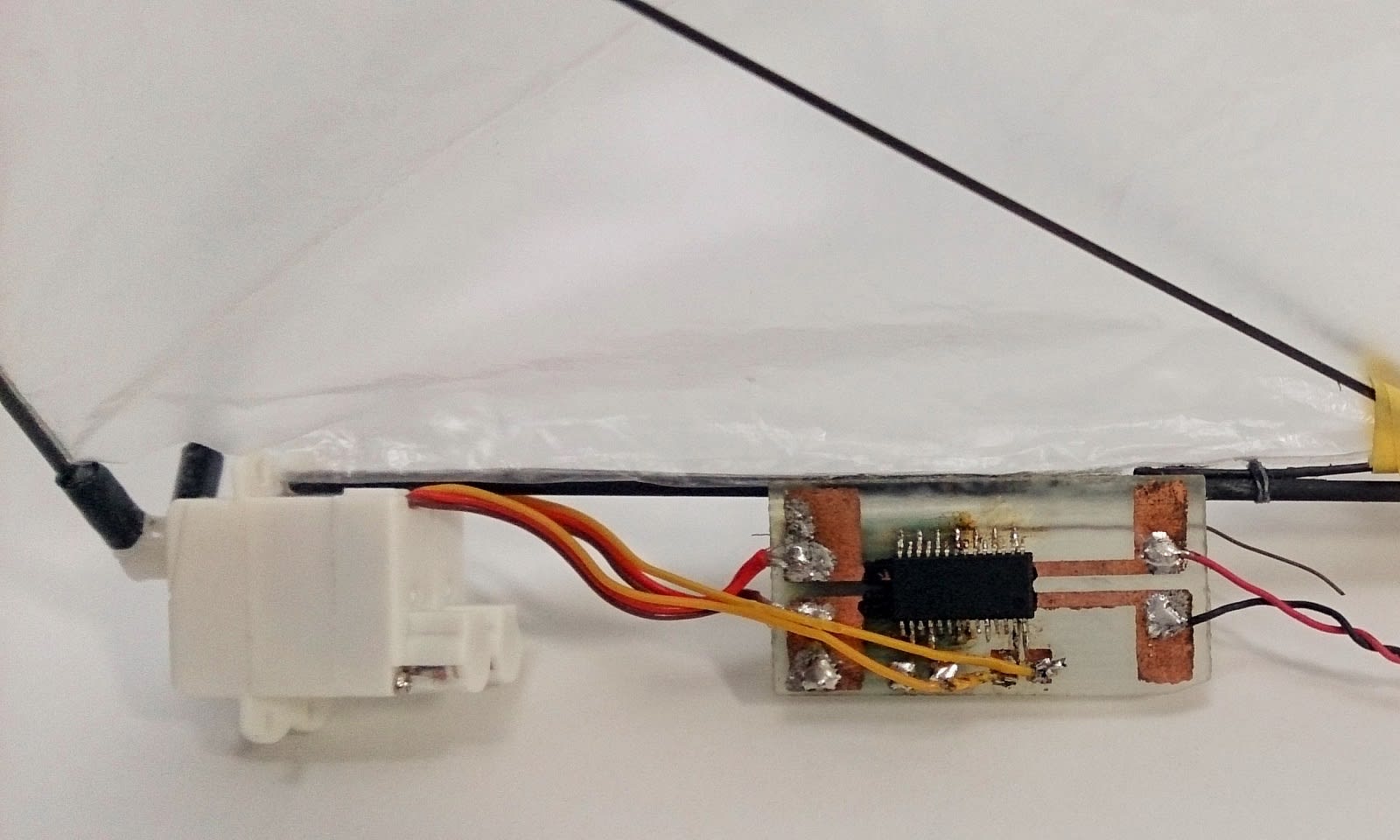
実は最初の試作で使ったサーボがアンダーパワーだったので、よりトルクの大きいサーボに換装して飛べるようになりました。飛行テストの映像は追い追いアップします。
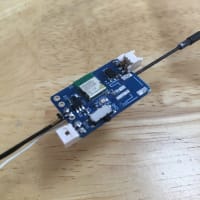
キーとなる制御システムはmbedを利用して開発。使用しているのは高性能の32ビットマイコンARM Cortex M0シリーズです。開発にあたっては、筆者が所属しているFablab北加賀屋の電子工作上級者のみなさんに大変お世話になりました。
コンセプトの有効性が実証できたので、これからさまざまなデザインに応用していきたいと思っています。
| 機体スペック |
| 全幅 550mm |
| 全長 200mm |
| 飛行重量 9.2g |
| (70mAhLi-po電池含む) |
|
製作年月 2015年5月 |









mbedプログラミングはびっくりするほど簡単です。先日北加賀屋で入門ワークショップやりました。最後の方でServo.h使ってネギ振りやってます。ご参考になれば。
(Slideshareで、Flappingwing mbedで検索してね)