








めっきり涼しくなりました。
katoさんのおかげで、財布は年末に向けてすっからかん(^^;)
ですから…レイアウトを完成ににと思いつつ…、仕事が終わらない!
週末は持ち帰りの仕事と家の用事でつぶれました。
でも先は少し見えたかな…。
さて少しの時間で、常点灯の検証を行いました。
一番の問題点は、
「KATOコアレスモーターは常点灯停止が出来るのか?」
ということです。
その前に、常点灯を少し説明します?
常点灯コントローラは、パルス波にて制御しています。
パルス波は、矩形波ともいいます。
下図に例を示します。


ご覧の通りモーターが動くか動かないかは、パルスの幅で決まります。
そのパルス幅と周期の比を「デューティ比」といいます。

つまりデューティ比が、
小さいとき :常点灯
中くらいのとき :低速
大きいとき :高速
と極論できますね。
小生の自作コントローラは、このデューティ比を可変させています。
そして、katoのコアレスと他のモーターで起こっている現象は下図のイメージです。
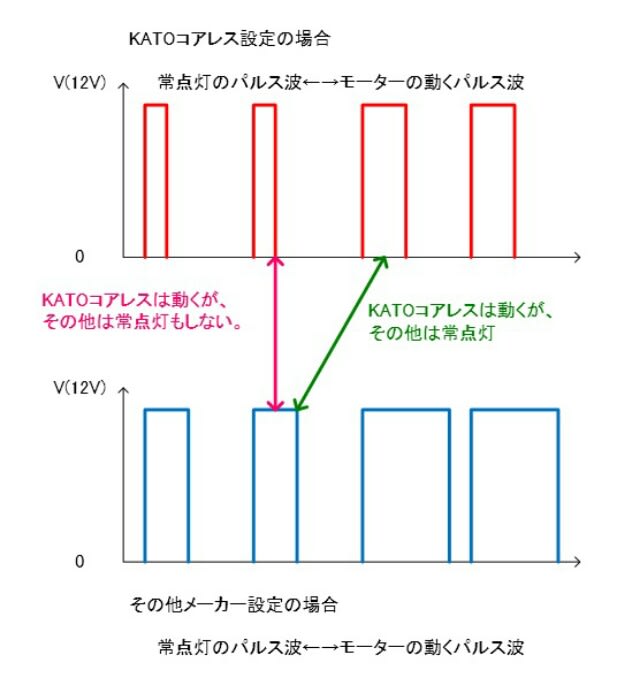
つまり、
・katoのコアレスの起動デューティが小さいため、他社のモーター基準のセッティングでは常点灯停止どころか普通に走る。
・逆にkatoコアレスでセッティングすると他社のモーターは起動しない。
という訳なのです。
それで低デューティをコントロールできるセッティングに回路を改造しました。
※混乱を避けるため、回路図は最終的に公開します。
デューティ比はオシロスコープなどがないと見えませんので、電圧で代用して可視化します。
つまり電圧が、
小さいとき :常点灯
中くらいのとき :低速
大きいとき :高速
というわけです。
ではkatoのコアレスがどれほどすごいかというと…。


常点灯停止時は、0.3V!
同じ条件でマイクロとTOMIXは、

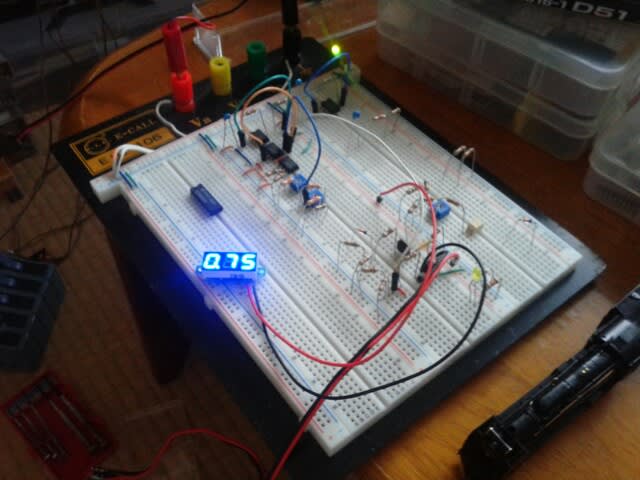


うんともすんともいいません。
でもこの同じ状態で、基板の青いVRを上げると、katoコアレスは高速走行しますが、他社は起動すらしませんでした。
では、概念的にはご理解いただけたでしょうか。
この実験結果が意味するところは、
・同じコントローラ(セッティング)では制御不可能。
という訳です。
じゃどうやってセッティングを切り換えるのか?
ここを今後考えていきたいと思います。

にほんブログ村

katoさんのおかげで、財布は年末に向けてすっからかん(^^;)
ですから…レイアウトを完成ににと思いつつ…、仕事が終わらない!
週末は持ち帰りの仕事と家の用事でつぶれました。
でも先は少し見えたかな…。
さて少しの時間で、常点灯の検証を行いました。
一番の問題点は、
「KATOコアレスモーターは常点灯停止が出来るのか?」
ということです。
その前に、常点灯を少し説明します?
常点灯コントローラは、パルス波にて制御しています。
パルス波は、矩形波ともいいます。
下図に例を示します。
ご覧の通りモーターが動くか動かないかは、パルスの幅で決まります。
そのパルス幅と周期の比を「デューティ比」といいます。
つまりデューティ比が、
小さいとき :常点灯
中くらいのとき :低速
大きいとき :高速
と極論できますね。
小生の自作コントローラは、このデューティ比を可変させています。
そして、katoのコアレスと他のモーターで起こっている現象は下図のイメージです。
つまり、
・katoのコアレスの起動デューティが小さいため、他社のモーター基準のセッティングでは常点灯停止どころか普通に走る。
・逆にkatoコアレスでセッティングすると他社のモーターは起動しない。
という訳なのです。
それで低デューティをコントロールできるセッティングに回路を改造しました。
※混乱を避けるため、回路図は最終的に公開します。
デューティ比はオシロスコープなどがないと見えませんので、電圧で代用して可視化します。
つまり電圧が、
小さいとき :常点灯
中くらいのとき :低速
大きいとき :高速
というわけです。
ではkatoのコアレスがどれほどすごいかというと…。
常点灯停止時は、0.3V!
同じ条件でマイクロとTOMIXは、
うんともすんともいいません。
でもこの同じ状態で、基板の青いVRを上げると、katoコアレスは高速走行しますが、他社は起動すらしませんでした。
では、概念的にはご理解いただけたでしょうか。
この実験結果が意味するところは、
・同じコントローラ(セッティング)では制御不可能。
という訳です。
じゃどうやってセッティングを切り換えるのか?
ここを今後考えていきたいと思います。
にほんブログ村






