








めっきり涼しくなりました。
katoさんのおかげで、財布は年末に向けてすっからかん(^^;)
ですから…レイアウトを完成ににと思いつつ…、仕事が終わらない!
週末は持ち帰りの仕事と家の用事でつぶれました。
でも先は少し見えたかな…。
さて少しの時間で、常点灯の検証を行いました。
一番の問題点は、
「KATOコアレスモーターは常点灯停止が出来るのか?」
ということです。
その前に、常点灯を少し説明します?
常点灯コントローラは、パルス波にて制御しています。
パルス波は、矩形波ともいいます。
下図に例を示します。


ご覧の通りモーターが動くか動かないかは、パルスの幅で決まります。
そのパルス幅と周期の比を「デューティ比」といいます。

つまりデューティ比が、
小さいとき :常点灯
中くらいのとき :低速
大きいとき :高速
と極論できますね。
小生の自作コントローラは、このデューティ比を可変させています。
そして、katoのコアレスと他のモーターで起こっている現象は下図のイメージです。
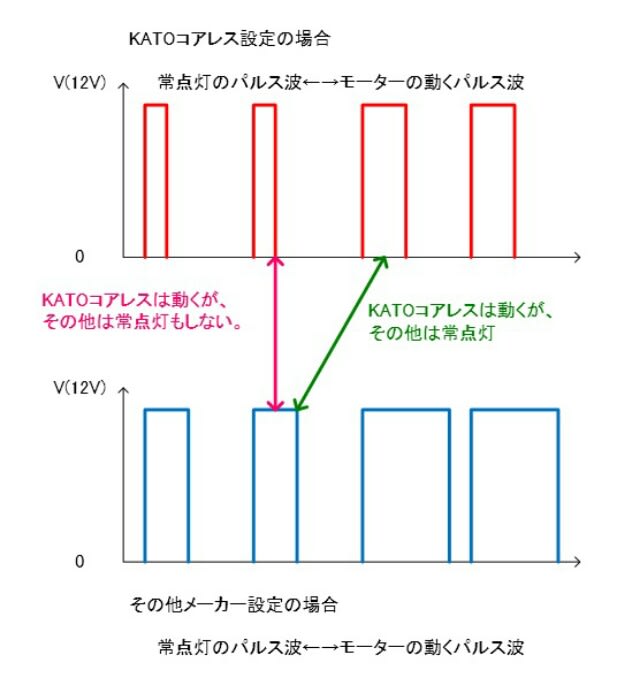
つまり、
・katoのコアレスの起動デューティが小さいため、他社のモーター基準のセッティングでは常点灯停止どころか普通に走る。
・逆にkatoコアレスでセッティングすると他社のモーターは起動しない。
という訳なのです。
それで低デューティをコントロールできるセッティングに回路を改造しました。
※混乱を避けるため、回路図は最終的に公開します。
デューティ比はオシロスコープなどがないと見えませんので、電圧で代用して可視化します。
つまり電圧が、
小さいとき :常点灯
中くらいのとき :低速
大きいとき :高速
というわけです。
ではkatoのコアレスがどれほどすごいかというと…。


常点灯停止時は、0.3V!
同じ条件でマイクロとTOMIXは、

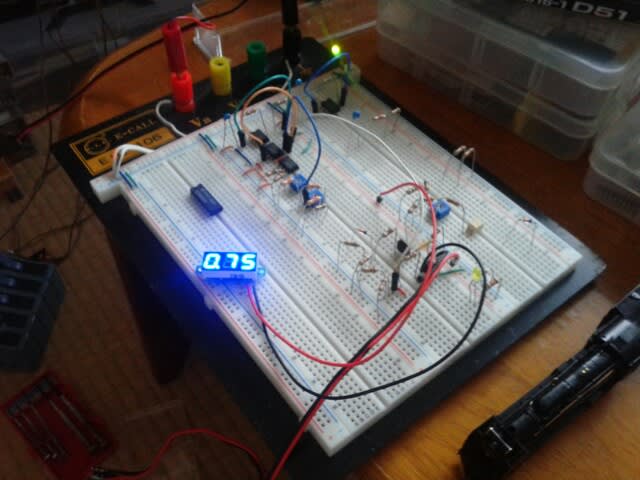


うんともすんともいいません。
でもこの同じ状態で、基板の青いVRを上げると、katoコアレスは高速走行しますが、他社は起動すらしませんでした。
では、概念的にはご理解いただけたでしょうか。
この実験結果が意味するところは、
・同じコントローラ(セッティング)では制御不可能。
という訳です。
じゃどうやってセッティングを切り換えるのか?
ここを今後考えていきたいと思います。

にほんブログ村

katoさんのおかげで、財布は年末に向けてすっからかん(^^;)
ですから…レイアウトを完成ににと思いつつ…、仕事が終わらない!
週末は持ち帰りの仕事と家の用事でつぶれました。
でも先は少し見えたかな…。
さて少しの時間で、常点灯の検証を行いました。
一番の問題点は、
「KATOコアレスモーターは常点灯停止が出来るのか?」
ということです。
その前に、常点灯を少し説明します?
常点灯コントローラは、パルス波にて制御しています。
パルス波は、矩形波ともいいます。
下図に例を示します。
ご覧の通りモーターが動くか動かないかは、パルスの幅で決まります。
そのパルス幅と周期の比を「デューティ比」といいます。
つまりデューティ比が、
小さいとき :常点灯
中くらいのとき :低速
大きいとき :高速
と極論できますね。
小生の自作コントローラは、このデューティ比を可変させています。
そして、katoのコアレスと他のモーターで起こっている現象は下図のイメージです。
つまり、
・katoのコアレスの起動デューティが小さいため、他社のモーター基準のセッティングでは常点灯停止どころか普通に走る。
・逆にkatoコアレスでセッティングすると他社のモーターは起動しない。
という訳なのです。
それで低デューティをコントロールできるセッティングに回路を改造しました。
※混乱を避けるため、回路図は最終的に公開します。
デューティ比はオシロスコープなどがないと見えませんので、電圧で代用して可視化します。
つまり電圧が、
小さいとき :常点灯
中くらいのとき :低速
大きいとき :高速
というわけです。
ではkatoのコアレスがどれほどすごいかというと…。
常点灯停止時は、0.3V!
同じ条件でマイクロとTOMIXは、
うんともすんともいいません。
でもこの同じ状態で、基板の青いVRを上げると、katoコアレスは高速走行しますが、他社は起動すらしませんでした。
では、概念的にはご理解いただけたでしょうか。
この実験結果が意味するところは、
・同じコントローラ(セッティング)では制御不可能。
という訳です。
じゃどうやってセッティングを切り換えるのか?
ここを今後考えていきたいと思います。
にほんブログ村

















常点灯が原因ということでしょうか? それとも自動加減速が問題なのでしょうか? 常点灯回路ってよく知らないのですが パルス式とか何とかと言う方式があるようですが TOMIXのコントロール方式ってなんなのでしょうかね? TOMIXコントローラーとかは常点灯でも後ろのライトはチラつく程度ですが ぼち吉鉄道さんのコントローラーは完全に両点灯してしまいますね 観察すると前後では微妙に明るさが違いますけれどチラつく程度ではなく完璧に点灯してしまいます これの原理ってなんなのでしょうかね~ 今後購入する動力車には必ずスナバ回路が必要ってことになりますね。
それと今回お借りしている回路のノッチ運転でのスムースな繋がりはなくノッチを上げると一気に速度があがります そう、放物線を描かないんです これって正常なのでしょうか?
ノッチ式では当方でもMAさんのは動きませんし ノッチを全開して さらにVRを一杯近く回すと動き出しますが TOMIXのコントローラーでは それほど大きくVRを回さなくても動き出してくれます この辺になにかトラップがあるのでは?って感じたりしています それとやはり原因はコアレスモーターなのでしょうか? いずれも電気音痴の言うことではありませんね~失礼致しました(^^; 以上報告まで・・・・・・
おはようございます。
コメントありがとうございます。
質問に解答する前に…。
常点灯と自動加減速は別物です。
常点灯は、パルス制御(PWM制御)のコントロール(VRの操作)でできるものです。
自動加減速は、言うなればコントロールを自動化しているだけです。
VRを自動的にゆっくり回したり早く回したりしているという方が分かりやすいでしょうか?
ですから、PWM回路と常点灯回路は全く同じです。
実際、常点灯と言っていますが正確には「常点灯停止」というのが正しい表現ですね。
つまり、モーターは動かないけどLEDは点灯するいや「点灯している用に見える」だけです。
話が少しそれますが、LEDと電球では点灯部分の構造が全く違います。
電球:フィラメント
LED:発光半導体
電球は、昔ながらです。そう、点滅に弱いです。焼け切れるからです。
LEDは、違います。
適性電流であれば、半永久的に使えます。点滅しても、発光体は痛みません。逆に点灯寿命が延びます。
これがポイントでして…。
「人間の目には1秒間に30回以上点滅すると、点灯にしか見えない」のです。
つまり、30回オンオフを繰り返すことにより省エネ効果を産んでいるのです。
ですから、「常点灯停止も、LEDは点滅しています。」
人間の目には見えないだけです。
それで…常点灯停止状態とは。
LED点灯>常点灯パルス波(デューティ比)>モーター起動
ここのバランスを保っているのが、常点灯停止です。
モーターを回さないために、昨日の記事に書きました「低デューティ比」で常点灯停止出来るパルス波を出しています。
ここをご理解いただけるでしょうか?
では、以下に解答をお書きします。
・TOMIXのコントロール方式ってなんなのでしょうね?
→PWM制御です。周波数は、22kHzくらいとネットにでてますね。
・TOMIXコントローラーとかは常点灯でも後ろのライトはチラつく程度ですが ぼち吉鉄道さんのコントローラーは完全に両点灯してしまいますね 観察すると前後では微妙に明るさが違いますけれどチラつく程度ではなく完璧に点灯してしまいます
→これが自作とメーカー製の差かもしれません。
ここは、小生の研究課題なんです。
・今回お借りしている回路のノッチ運転でのスムースな繋がりはなくノッチを上げると一気に速度があがります …。
→抵抗のセッティングが合わないのかもしれません。
小生宅ではいい感じだったのですが…。
正直、すごく単純な回路なのでこんなに現象が起こる事が不思議なんです(^^;
・コアレスモーターなのでしょうか?
→これに関しては、ご迷惑をおかけしています 。
開発時は、ヤード牽引を兼ねていましたのである程度車両を繋げて実験してました。
単機のkatoコアレスの実験を怠っていました。
尚先日の実験で、同じ回路ではkatoコアレスはコントロールできない事が分かりました。
ここは、開発要素です。
以上で、ご理解いただけるでしょうか?
ここが分からない等、再コメントください。
よろしくお願いします。
1.これから走らせる車両をレールに乗せると、コントローラーの自動選別機能でメーカー名がLEDに表示されます。
2.車両が常点灯しない場合は、調整ボリュームで常点灯させます。
3.後は、走行用のボリュームを右に回すと走り出します。
すみません、勝手な妄想です。
でも、車両の下側にバーコードでも付けてくれれば、
読み取って車両の選別も可能ではないかな?
Nでは辛いけど、HOサイズなら、出来そうな気がする。
こんばんわ。
コメントありがとうございます。
こりゃまた無謀なご提案で(^^;
PICのコントローラを開発して、バーコード読み取り機能は…。
やはり、かなり高度ですよ!
数年かけて開発する内容ですね(^^;