








2023年7月11日、国立研究開発法人宇宙航空研究開発機構 は月面着陸を目指して
X線分光撮像衛星(XRISM)および小型月着陸実証機(SLIM)の打ち上げすると発表しました。
X線分光撮像衛星(XRISM)および小型月着陸実証機(SLIM)は、H-IIAロケット47号機に搭載され
下記の予定で打ち上げられます。
SLIMはSmart Lander for Investigating Moonの略
記
打上げ予定日打上げ予定時刻打上げ予備期間打上げ場所
| : | 2023年8月26日(土) |
| : | 午前9時34分57秒(日本標準時) |
| : | 2023年8月27日(日)~2023年9月15日(金) |
| : | 種子島宇宙センター 大型ロケット発射場 |
2024年1月20日に追記
2023年9月7日に打ち上げられました。
2024年1月20日の未明(0時20分)にSLIMの着陸は成功
ただ、太陽光発電が機能せずピンポイント着陸が成功したか否かは約1か月後に判明する予定
日本の月面着陸へのトライアル
過去2回のトライアルは失敗に終わっています。
トライアル1
2022年11月22日未明にかけて計画していた月面着陸失敗 By JAXA。
日本初の月面着陸を目指す無人探査機「OMOTENASHI」(オモテナシ)について、JAXA=宇宙航空研究開発機構は、地上との通信が安定しない状況が改善されないことから2022年11月22日未明にかけて計画していた月面着陸への挑戦を断念したと発表しました。
米国の超大型ロケットSLS初号機に試験的に搭載された、JAXAの月面着陸機「OMOTENASHI(オモテナシ)」。10センチ角のキューブ6個分、スーツケース程度の大きさという超小型サイズながら、小さなエンジンの噴射で着陸時の加速を弱める"セミハードランディング"という方式を目指し、どこまで月の重力を制することができるかチャレンジした。しかし、残念ながらロケットからの分離の問題で、月の軌道までたどり着くことはできなかった。
過去2回のトライアルは失敗に終わっています。
トライアル1
2022年11月22日未明にかけて計画していた月面着陸失敗 By JAXA。
日本初の月面着陸を目指す無人探査機「OMOTENASHI」(オモテナシ)について、JAXA=宇宙航空研究開発機構は、地上との通信が安定しない状況が改善されないことから2022年11月22日未明にかけて計画していた月面着陸への挑戦を断念したと発表しました。
米国の超大型ロケットSLS初号機に試験的に搭載された、JAXAの月面着陸機「OMOTENASHI(オモテナシ)」。10センチ角のキューブ6個分、スーツケース程度の大きさという超小型サイズながら、小さなエンジンの噴射で着陸時の加速を弱める"セミハードランディング"という方式を目指し、どこまで月の重力を制することができるかチャレンジした。しかし、残念ながらロケットからの分離の問題で、月の軌道までたどり着くことはできなかった。
NHKの詳細報道にリンクさせていただきました。
「OMOTENASHI」日本初の無人探査機の月面着陸断念 JAXA | NHK | 宇宙
トライアル2
2023年4月26日、民間会社ispace(アイスペース)社がトライするも失敗。
2機目は記憶に新しい、日本初の民間月探査を目指すispace(アイスペース)の初着陸ミッションだ。こちらはメインとサブ、2種類のエンジンを逆噴射して月の重力による加速を制御しながら、まっすぐ月面に直立するように降りる方式だ。
4月26日に初着陸に挑戦したが、失敗。報告によれば、事前の飛行計画の中に、クレーターの内側に入った際の急激な高度の変化が織り込まれていなかったことが原因と考えられている。フライトコンピューターが高度情報を"誤っている"と結論づけてしまったため、実際よりも数km以上高いポイントからエンジン噴射を開始。余裕だったはずの推進剤も途中で尽きてしまい、ハードランディングしてしまったようだ。
トライアル2
2023年4月26日、民間会社ispace(アイスペース)社がトライするも失敗。
2機目は記憶に新しい、日本初の民間月探査を目指すispace(アイスペース)の初着陸ミッションだ。こちらはメインとサブ、2種類のエンジンを逆噴射して月の重力による加速を制御しながら、まっすぐ月面に直立するように降りる方式だ。
4月26日に初着陸に挑戦したが、失敗。報告によれば、事前の飛行計画の中に、クレーターの内側に入った際の急激な高度の変化が織り込まれていなかったことが原因と考えられている。フライトコンピューターが高度情報を"誤っている"と結論づけてしまったため、実際よりも数km以上高いポイントからエンジン噴射を開始。余裕だったはずの推進剤も途中で尽きてしまい、ハードランディングしてしまったようだ。

2023年4月26日NHKプラスで視聴 NHKニュース番組より(上の写真)
日本のベンチャー企業「ispace」開発の月着陸機
2023年4月27日の早朝のNHKテレビの時事公論(再放送)でispace社の失敗に対して
特集番組が放映されました。この中からいくつか紹介します。

番組では失敗はしたものの6年間で着陸寸前までこぎつけたベンチャー企業「ispace」に
好意的なコメントが寄せられた。

上の写真は最近の月面探査に関する米中の覇権争いを整理したパネル

上の写真は「月の資源は誰のもの」に関する説明パネル
次に、2023年7月23日(日)23:30からのNHKEテレ「サイエンスZERO」
探検!宇宙科学研究所#2 月着陸機 打ち上げ直前SPから上述のSLIMを中心として
写真紹介していきます。添付した写真はすべて上記番組からの引用です。
月探査の歴史

上の写真のように1959年旧ソビエトが世界初の月探査機ルナ1号を打ち上げ以降
アメリカが1969年アポロ11号が月面着陸を成功させています。
2019年には中国が月の裏側に着陸を成功させています。さらに中国は2020年に
月の土壌を持ち帰ることに成功しています。
これまで月面着陸に挑戦し、無事に着陸することができたのはソ連、米国、中国の3ヶ国だけ。
2019年にはイスラエルの探査機「べレシート」とインドの「チャンドラヤーン2」が
月着陸に挑んだが、成功しなかった。月の重力を制御して安全に着陸するということは、
決してたやすいことではない。
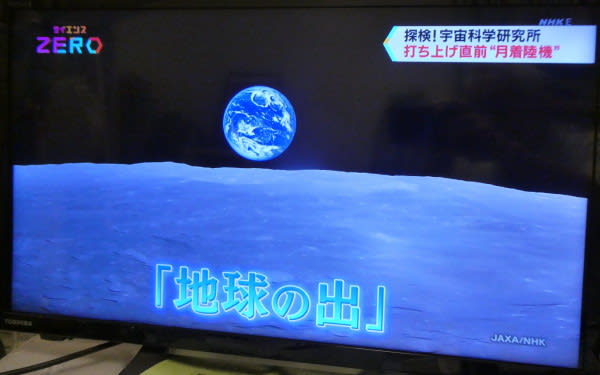
上の写真はJAXAが以前の探査ミッションで撮影した月における「地球の出」
地球は青かったが実感できる写真です。
SLIMの外観

上の写真は小型月着陸実証機(SLIM)のイメージ図

上の写真は宇宙科学研究所に展示の小型月着陸実証機(SLIM)の模型
小型月着陸実証機(SLIM)に関する詳細は下記サイトで確認できます。
月着陸の場所

上の写真は小型月着陸実証機(SLIM)の着陸地点です。神酒(みき)の海の近辺です。
この地点は過去の調査で月マントル(かんらん岩)が露出している場所で、月面着陸に
成功した場合、SLIMの分光カメラで成分分析が行われる予定になっています。
月が如何に誕生したか?の有力仮設である「巨大衝突仮設」を解明するのに貢献が期待される。
月のマントル成分と地球の成分とを比較することで、「月は地球から生まれたのか」それとも「まったく異なる成分で誕生して地球の衛星となったのか」を調査する。

上の写真はSLIMの分光カメラによるマントル成分の分析のイメージ図
SLIMに搭載の小型ロボット
LEVは Lunar Excursion Vehicle の略
REV-1


上の2枚の写真は小型プローブ(LEV-1)。着陸地点の硬さや温度などの情報を収集します。
「LEV-1」は月面を跳躍して(約3m飛ぶ)移動します。質量は約2.1Kg。
中央大学、和歌山大学、東京農工大学等の研究機関がJAXAの開発に協力
LEV-2



上の3枚の写真はLEV-2
超小型の月面ロボット「LEV-2」(SORA-Q:ソラキュー)の質量は約250g
LEV-2の愛称を「SORA-Q」と名付けられました。
タカラトミーの人気商品である変形ロボット「トランスフォーマー」の技術が活かされています。
LEV-2にはスマホで使用されているような小型カメラが搭載されています。
開発はタカラトミーの他JAXA、ソニーG、同志社大学らが担当

LEV-2の大切な役目としてSLIMの周辺状況の撮影が重要なミッションとなっています。
LEV-2(SORA-Q)を解説したYoutube動画にGooで共有させていただきました。
SORA-Q(ソラキュー)、JAXAとタカラトミー等の共同開発によって生まれた、超小型の変形型月面ロボットの映像です。
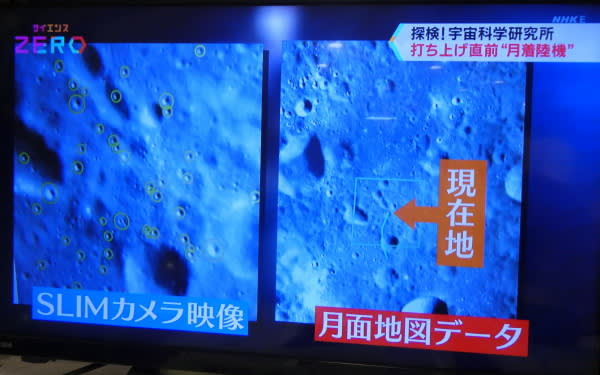
ピンポイント着陸技術

上の写真はSLIMに搭載のカメラ
「SLIM」は、月周回軌道から15kmまで高度を下げて着陸シーケンスに入り、その後20~30分で月面にピンポイントでの着陸を目指す。月周回軌道からの降下や着陸候補地点を認識するため、「SLIM」はカメラを使って月面を撮影し、クレーターの形状や位置から月のどのあたりを飛行中かの自位置の推定を行うしくみが取り入れられている。

上の2枚の写真はSLIMのピンポイント着陸のイメージ
















※コメント投稿者のブログIDはブログ作成者のみに通知されます