









一つ前の記事「揺動遊具の耐久試験」で取り上げたリンク機構について模式図を交えながら説明したいと思います。リンクを支える支柱が2本の製品の動きは動画で見ると良く分かります。
そして座面中央の軌跡は下の図の点Mの動きで示されています。
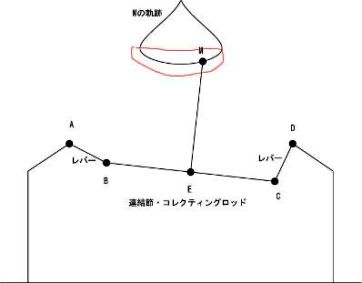
特徴的なことは何らかの機械的なストッパーを設けることなく運動が制御されていることです。これはこの機構が持つ最も優れた点です。しかしどうしてもボディが大きくなり、リンク全体を覆うことは困難でした。赤い線で示した範囲の動きを小型化したリンクで実現したのが以下の動画で示すロッキング遊具です。
リンクのジオメトリを変更すると同じ両テコ機構でありながら以下のようになることを避けることが出来ません。

リンク機構の干渉を考えずに純幾何学的に座面中央の点の軌跡を求めると以下の図が得られます。

この軌跡を数値的に求めることは連立の2元2次方程式を解くことに帰着します。しかし綺麗な曲線を求めようとすれば複素数の解も考慮する必要があるのです。そしてこの曲線の形から分かるように何らかの機械的な緩衝装置が欠かせません。「特願2008-183554」そのものです。
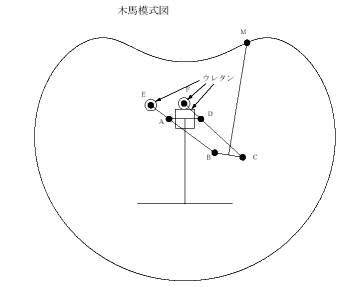
これを解決したのが左右の揺動節を延長して、ここにウレタンゴムの緩衝材(パイプ)を取り付け、支柱の中央に同じくウレタンゴムのブロックを配置したリンクです。このレイアウトの利点は二つあります。一つは緩衝材に長い素材を使えるのでゴムの歪を低く抑えることが出来、耐久性が向上します。もう一つは中央の支柱の「頭を抑える」動作になるので振動を少なくさせることが出来るのです。これは乗ってみて実感しました。
↓ポチッと応援お願いします!

そして座面中央の軌跡は下の図の点Mの動きで示されています。
特徴的なことは何らかの機械的なストッパーを設けることなく運動が制御されていることです。これはこの機構が持つ最も優れた点です。しかしどうしてもボディが大きくなり、リンク全体を覆うことは困難でした。赤い線で示した範囲の動きを小型化したリンクで実現したのが以下の動画で示すロッキング遊具です。
リンクのジオメトリを変更すると同じ両テコ機構でありながら以下のようになることを避けることが出来ません。
リンク機構の干渉を考えずに純幾何学的に座面中央の点の軌跡を求めると以下の図が得られます。
この軌跡を数値的に求めることは連立の2元2次方程式を解くことに帰着します。しかし綺麗な曲線を求めようとすれば複素数の解も考慮する必要があるのです。そしてこの曲線の形から分かるように何らかの機械的な緩衝装置が欠かせません。「特願2008-183554」そのものです。
これを解決したのが左右の揺動節を延長して、ここにウレタンゴムの緩衝材(パイプ)を取り付け、支柱の中央に同じくウレタンゴムのブロックを配置したリンクです。このレイアウトの利点は二つあります。一つは緩衝材に長い素材を使えるのでゴムの歪を低く抑えることが出来、耐久性が向上します。もう一つは中央の支柱の「頭を抑える」動作になるので振動を少なくさせることが出来るのです。これは乗ってみて実感しました。
↓ポチッと応援お願いします!















