









以前もこの木馬について書かれたエッセイスト増田れい子さんの文を紹介したことがあります。そして加速度を測定してくれた仲間からもコメントを頂いて、改めてこの木馬が「名機」だと認識しています。もう一度この木馬がこの様なデザインになった必然性を少し詳しく説明したくなりました。

木馬を支える支柱の材料はガス管(65Aφ76.3mm)で溶接エルボウでリンクの支点を内側にシフトさせています。図で示した青いサークルの部分です。

位置エネルギーが一番小さい状態は図0で示します。平衡状態ですね。
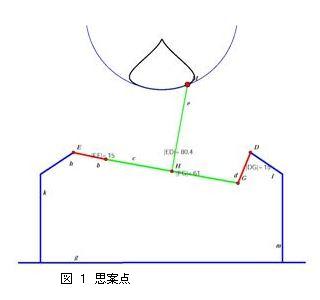
揺動節と連結節が一直線になった時、幾何学的に上下どちらの方向にも動くことが出来ます。この状態を機構学では「思案点」と呼びます。工学の用語なのに擬人的な表現ですが、ぴったりの用語で考案した人は素晴らしいです。エルボウを使うのはこの時にベアリングを貫通するシャフトを支柱と干渉させないためだったのです。

多くの機構学の本ではこの思案点を通過した後のリンクの挙動を扱っていません。しかし両テコ機構であってもすり抜けることが出来ればさらに複雑な動きをすることが幾何学的にも「木馬的にも」分かるのです。座面中央の点Mは思案点を過ぎた当りで大きな曲率(言い換えれば小さな曲率半径)で運動することが軌跡から分かります。これが「クイッ」と感じる運動の正体です。加速度のx成分とz成分を精査すると数値的に納得できるでしょう。

うまくすり抜けると最終的に平衡状態の鏡像になります。でもその経路は鏡像でないのが面白いと思っています。質量を載せずに高速度撮影した動画(300fps)で色んなことが分かるでしょう。
2年前から私がYouTubeに上げた動画がついに100本になりました。最近は16:9のアスペクト比に対応し、高画質でも観賞出来るようになりました。YouTubeガンバレ!
↓ポチッと応援お願いします!

木馬を支える支柱の材料はガス管(65Aφ76.3mm)で溶接エルボウでリンクの支点を内側にシフトさせています。図で示した青いサークルの部分です。
位置エネルギーが一番小さい状態は図0で示します。平衡状態ですね。
揺動節と連結節が一直線になった時、幾何学的に上下どちらの方向にも動くことが出来ます。この状態を機構学では「思案点」と呼びます。工学の用語なのに擬人的な表現ですが、ぴったりの用語で考案した人は素晴らしいです。エルボウを使うのはこの時にベアリングを貫通するシャフトを支柱と干渉させないためだったのです。
多くの機構学の本ではこの思案点を通過した後のリンクの挙動を扱っていません。しかし両テコ機構であってもすり抜けることが出来ればさらに複雑な動きをすることが幾何学的にも「木馬的にも」分かるのです。座面中央の点Mは思案点を過ぎた当りで大きな曲率(言い換えれば小さな曲率半径)で運動することが軌跡から分かります。これが「クイッ」と感じる運動の正体です。加速度のx成分とz成分を精査すると数値的に納得できるでしょう。
うまくすり抜けると最終的に平衡状態の鏡像になります。でもその経路は鏡像でないのが面白いと思っています。質量を載せずに高速度撮影した動画(300fps)で色んなことが分かるでしょう。
2年前から私がYouTubeに上げた動画がついに100本になりました。最近は16:9のアスペクト比に対応し、高画質でも観賞出来るようになりました。YouTubeガンバレ!
↓ポチッと応援お願いします!
















事故が起こると原因が究明され、最終的には誰かが責任を負います。しかし逆に事故が起こらない原因は言われてみれば不明のままです。これは危険学にとっても興味深い話です。畑村先生にも問うて見たいですね。
来週あたりからいよいよ失敗の本筋に入るつもりです。
この木馬、設計が古くて現在の安全規格を満たしていないという話を伺いました。事故を起こした事がないのでしょうか。事故に至らない小さなトラブルはあったでしょうか。
もしなかったとすれば、それはなぜなんでしょう。現在の安全規格を満たさない木馬が事故を起こさない理由。
事故が起きれば構造は研究され、改良されます。しかし事故が起きない理由を考えるのは難しいように思います。でも事故が起きた時の深刻さに較べて、「事故が起きない理由」の探求って、なんだか楽しいではありませんか。