









機械工学の中でも機構学は初等幾何学の香がして好きな分野です。古書店で見かけるとつい買ってしまいます。渡辺茂著の『機構学講義Ⅰ』(共立、1961年初版)は神田の明倫館書店で2009年3月に購入しました。本書の目次には『機構学講義Ⅱ』の目次も記載されていて、摩擦機械の章に繊維機械がありました。朝ドラ「カーネーション」が放映されていた頃、ミシンを含む繊維機械について知りたくてアマゾンの古書を求めました。期待していたとおり、ミシンのことも書いてあって図版を眺めるだけでも楽しめました。

昨日は朝早くに前橋を発って長野県の木祖村に行き、適度に危ない遊具「遊動円木」の改修作業のお手伝いをしました。長野に出かける前にこの遊具の機構(ロバーツの近似直線運動機構)についてもう一度考え直す必要を感じて開いたのが『機構学講義Ⅰ』です。リンクを複数個組み合わせて狙った動きをさせるためには特別な条件を満たす必要があります。
機構の動作が平面の上だけで為される場合、縦横2方向の併進運動と回転運動に限られますから、一つの機械要素(エレメント)の持つ自由度は3です。(空間ならば6自由度)これらのエレメントを拘束している二つのエレメントの組み合わせをペア(対偶)と呼びます。一方のエレメントを固定し、拘束条件に従って動かすときの自由度をペアの自由度と呼びます。自由度1のペアには回転ペア、往復ペア、ネジペアがあり、自由度2のペアには茶筒と蓋のような回転往復ペアがあります。
エレメントの数をE、自由度1のペアの数をP1、自由度2のペアの数をP2とすれば、要素を組み合わせて作った機構全体の自由度Fは以下のように表すことが出来ます。
F=3(E-1)ー2P1-P2
特に運動が一義的に決定される決定機構ではF=1でなければなりません。従って以下の関係が成り立ちます。
3E-2P1-P2=4
ロバーツの近似直線運動機構では全て回転ペアから構成されているので、P2=0で
3E-2P1=4
という関係が成り立っているはずです。この関係式から要素の数Eが偶数でなければならないことが分かります。また3と2は互いに素(最大公約数=1)ですから、上の方程式は整数の解を持ちます。
Eの最小解は4と分かっているので、0を含む自然数nを使って一般解を以下のように書くことが出来ます。
E =2n+4
P1=3n+4
n=2の時、E=8、P1=10となりますが、これが遊動円木の場合になります。このあたりの議論は初等整数論の香がしますね。
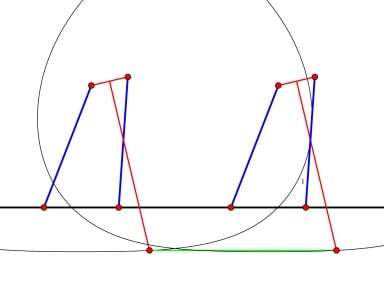
この絵はCinderella1.4で描きました。私は手先が不器用で簡単な模型製作にも苦労しますが、Cinderellaなら色んなリンクを試す事が出来ます。ただ一般的なCADと違うのは図形を描く順序が極めて重要で、図形の依存関係を考慮しないと図形を動かして軌跡を描かせることが出来ません。
↓ポチッと応援お願いします!

昨日は朝早くに前橋を発って長野県の木祖村に行き、適度に危ない遊具「遊動円木」の改修作業のお手伝いをしました。長野に出かける前にこの遊具の機構(ロバーツの近似直線運動機構)についてもう一度考え直す必要を感じて開いたのが『機構学講義Ⅰ』です。リンクを複数個組み合わせて狙った動きをさせるためには特別な条件を満たす必要があります。
機構の動作が平面の上だけで為される場合、縦横2方向の併進運動と回転運動に限られますから、一つの機械要素(エレメント)の持つ自由度は3です。(空間ならば6自由度)これらのエレメントを拘束している二つのエレメントの組み合わせをペア(対偶)と呼びます。一方のエレメントを固定し、拘束条件に従って動かすときの自由度をペアの自由度と呼びます。自由度1のペアには回転ペア、往復ペア、ネジペアがあり、自由度2のペアには茶筒と蓋のような回転往復ペアがあります。
エレメントの数をE、自由度1のペアの数をP1、自由度2のペアの数をP2とすれば、要素を組み合わせて作った機構全体の自由度Fは以下のように表すことが出来ます。
F=3(E-1)ー2P1-P2
特に運動が一義的に決定される決定機構ではF=1でなければなりません。従って以下の関係が成り立ちます。
3E-2P1-P2=4
ロバーツの近似直線運動機構では全て回転ペアから構成されているので、P2=0で
3E-2P1=4
という関係が成り立っているはずです。この関係式から要素の数Eが偶数でなければならないことが分かります。また3と2は互いに素(最大公約数=1)ですから、上の方程式は整数の解を持ちます。
Eの最小解は4と分かっているので、0を含む自然数nを使って一般解を以下のように書くことが出来ます。
E =2n+4
P1=3n+4
n=2の時、E=8、P1=10となりますが、これが遊動円木の場合になります。このあたりの議論は初等整数論の香がしますね。
この絵はCinderella1.4で描きました。私は手先が不器用で簡単な模型製作にも苦労しますが、Cinderellaなら色んなリンクを試す事が出来ます。ただ一般的なCADと違うのは図形を描く順序が極めて重要で、図形の依存関係を考慮しないと図形を動かして軌跡を描かせることが出来ません。
↓ポチッと応援お願いします!















