








先日の高専ロボコン2012関東甲信越大会では応援席や2階席から観戦していましたので、各校のマシンの詳細までは撮影することが出来ませんでした。TV局のカメラさんのように近づいて機構の詳細まで撮影したかった。
9月の校内テストランではA・B両マシンは4足歩行をしていましたし、本年度のルールブックでは以下のように記されています。
III- 3 ロボットの構造・足の制限
(1) ロボットの足
a) ロボットの足は2、4、6本のいずれかとする。
私の見たところでは、作りやすさ・重量・コストから多くは4足歩行であり、チェビシェフのリンクが使われていたようです。この機構については3年前の記事でも取り上げたことがあります。また私のブログのアクセス解析でもこの記事の閲覧回数が多いことが分かります。しかし昔の記事は今思うと少しツッコミが足りないように思われます。
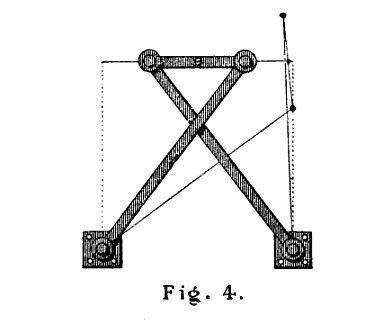
近似直線運動を実現するチェビシェフのリンクはロシアの数学者パフヌティ・チェビシェフ(Pafnuty Lvovich Chebyshev、1821-1894)によって考案されました。統計学でお馴染みのチェビシェフの不等式で数学史に名を残した方です。ワットが彼の発明した蒸気機関にリンク機構で近似直線運動を実現してから、当時の純粋数学者も機構学に興味を持ちました。見出しの画像は4色問題で知られたアルフレッド・ケンプの"How to draw a straight line; a lecture on linkages"にあるイラストです。ビクトリア朝の工学の本のイラストは味があって、私は好きです。この論文は名著の誉れ高く後の教科書に大きな影響を与えたらしい。今でもアマゾンで購入可能ですが、私はプロジェクト・グーテンベルグのお世話になりました。
ケンプの論文でも現行の教科書でもこのチェビシェフのリンクは軽く触れられているだけですが、この機構を詳しく論じた本を持っています。

John Bryantさん(手前)とChris Sangwinさんが書いた"How round is your circle?"ではワットの機構を論じた文に続いてこの機構の解説が書かれています。同書に従って私もチェビシェフのリンクの動画を作ってみました。
見栄えを良くするという作業を除けば、この程度のアニメーションを見るのに5分も必要としません。しかし一般的なてこクランク機構(lever crank mechanism)ではなく、両てこ機構(double lever mechanisim)の描く軌跡を描画し、切れ目のない動画を作れるCinderellaの設計の優秀さは「インタラクティブな幾何ソフトの問題点」の「動的問題」等を読むと良く分かります。
シンデレラのプログラムの数学的な部分はすべて複素数の計算を行っています。 ですから、見た目に交点がなくても、シンデレラはそれを特別な場合として場合分けするのではなく、交点の座標が実数でない、と判断して計算を進めるだけなのです。
JohnさんとChrisさんの著作を見ると、この機構が直角三角形の幾何学的性質を上手く利用していることが説明されています。

このリンクのプロポーションは
AD=4
AB=CD=5
CB=2(PはCBの中点)
です。図から明らかなように、アームABとDCが交差して対称形をなすとき、ベースラインADから点B・P・Cへの距離は正確に4になります。またアームAB・DCがベースラインに垂直になるときも点Pの高さは正確に4になる事は、辺の比が3:4:5の直角三角形が形作られることから明らかでしょう。では点Pがこれ以外の位置にある時は高さ4からどれ位離れるか、これを計算したのが以下のグラフです。

ADの長さを100mmとした時の最大の変位は僅か0.25mmです。0.5mmのシャープペンシルの幅以下ですね。さすがにCinderellaで数値計算するのは難しそうで、いずれMaximaで計算してみましょう。
さて辺の比が3:4:5の直角三角形で上手く近似直線運動が実現できたのだから、異なるプロポーションの直角三角形でも出来ないか、と思うのは人情でしょう。それで辺の比が全て整数となる20:21:29の直角三角形で試してみました。

それっぽくは描けましたが、仔細に見るとイマイチですね。この絵を描いてチェビシェフさんの実力に恐れ入りました。さすが「ロシアの数学の父」です。
このままではこのリンクは歩行そしてモーターで駆動するには不十分です。その話は次回。
↓ポチッと応援お願いします!

9月の校内テストランではA・B両マシンは4足歩行をしていましたし、本年度のルールブックでは以下のように記されています。
III- 3 ロボットの構造・足の制限
(1) ロボットの足
a) ロボットの足は2、4、6本のいずれかとする。
私の見たところでは、作りやすさ・重量・コストから多くは4足歩行であり、チェビシェフのリンクが使われていたようです。この機構については3年前の記事でも取り上げたことがあります。また私のブログのアクセス解析でもこの記事の閲覧回数が多いことが分かります。しかし昔の記事は今思うと少しツッコミが足りないように思われます。
近似直線運動を実現するチェビシェフのリンクはロシアの数学者パフヌティ・チェビシェフ(Pafnuty Lvovich Chebyshev、1821-1894)によって考案されました。統計学でお馴染みのチェビシェフの不等式で数学史に名を残した方です。ワットが彼の発明した蒸気機関にリンク機構で近似直線運動を実現してから、当時の純粋数学者も機構学に興味を持ちました。見出しの画像は4色問題で知られたアルフレッド・ケンプの"How to draw a straight line; a lecture on linkages"にあるイラストです。ビクトリア朝の工学の本のイラストは味があって、私は好きです。この論文は名著の誉れ高く後の教科書に大きな影響を与えたらしい。今でもアマゾンで購入可能ですが、私はプロジェクト・グーテンベルグのお世話になりました。
ケンプの論文でも現行の教科書でもこのチェビシェフのリンクは軽く触れられているだけですが、この機構を詳しく論じた本を持っています。
John Bryantさん(手前)とChris Sangwinさんが書いた"How round is your circle?"ではワットの機構を論じた文に続いてこの機構の解説が書かれています。同書に従って私もチェビシェフのリンクの動画を作ってみました。
見栄えを良くするという作業を除けば、この程度のアニメーションを見るのに5分も必要としません。しかし一般的なてこクランク機構(lever crank mechanism)ではなく、両てこ機構(double lever mechanisim)の描く軌跡を描画し、切れ目のない動画を作れるCinderellaの設計の優秀さは「インタラクティブな幾何ソフトの問題点」の「動的問題」等を読むと良く分かります。
シンデレラのプログラムの数学的な部分はすべて複素数の計算を行っています。 ですから、見た目に交点がなくても、シンデレラはそれを特別な場合として場合分けするのではなく、交点の座標が実数でない、と判断して計算を進めるだけなのです。
JohnさんとChrisさんの著作を見ると、この機構が直角三角形の幾何学的性質を上手く利用していることが説明されています。
このリンクのプロポーションは
AD=4
AB=CD=5
CB=2(PはCBの中点)
です。図から明らかなように、アームABとDCが交差して対称形をなすとき、ベースラインADから点B・P・Cへの距離は正確に4になります。またアームAB・DCがベースラインに垂直になるときも点Pの高さは正確に4になる事は、辺の比が3:4:5の直角三角形が形作られることから明らかでしょう。では点Pがこれ以外の位置にある時は高さ4からどれ位離れるか、これを計算したのが以下のグラフです。
ADの長さを100mmとした時の最大の変位は僅か0.25mmです。0.5mmのシャープペンシルの幅以下ですね。さすがにCinderellaで数値計算するのは難しそうで、いずれMaximaで計算してみましょう。
さて辺の比が3:4:5の直角三角形で上手く近似直線運動が実現できたのだから、異なるプロポーションの直角三角形でも出来ないか、と思うのは人情でしょう。それで辺の比が全て整数となる20:21:29の直角三角形で試してみました。
それっぽくは描けましたが、仔細に見るとイマイチですね。この絵を描いてチェビシェフさんの実力に恐れ入りました。さすが「ロシアの数学の父」です。
このままではこのリンクは歩行そしてモーターで駆動するには不十分です。その話は次回。
↓ポチッと応援お願いします!
















私は今高専2年生でロボコンに参加しており、offシーズンにチェビシェフ車輪の研究をするためインターネットを用いて調べていたら「271828の滑り台log」でのチェビシェフ車輪についての記事を見つけました。
とても参考になり分かりやすかったのですが、文の最後に歩行もしくはモーターで駆動するには不十分とあります。
その理由やチェビシェフ車輪でのメリットとデメリットなどを知っていたら教えていただけないでしょうか?