着陸のたびにペラが折れるちびFOX。
主翼の上にモーターを移して、プッシャータイプに改造しようかと思っていたところ、Y.Mitaさんと旅ねこさんから「プロペラアダプター(セーバー)を使えばよい」とのコメントをいただきました。
プロペラアダプター?
私の頭の中では、モーターシャフト径とペラの穴が異なる場合に使用するパーツという認識だったため「???」状態でした。
「もしかして、破損防止の働きもあるの?」と、旅ねこさんの動画を拝見してみました・・・
「あわわわわ・・・」
こんなに素晴らしい働きをするなんて・・・知らなかった・・・・
そして恥ずかしいことなのですが・・・

持ってました(バカでーす!)
以前、ちびFOX用のペラを買った際に、注文していないのに送られてきたものです。
まじめにショップにその旨連絡したところ、「手違いで混ざってしまったようです。返品しなくて結構ですので、どうぞご使用ください。」とのこと。
その時は「アダプターいらないな・・・」と思っていたのですが、今日になって感謝感謝です。
では早速。
このように取り付けていたものを

プロペラセーバーに変えました。
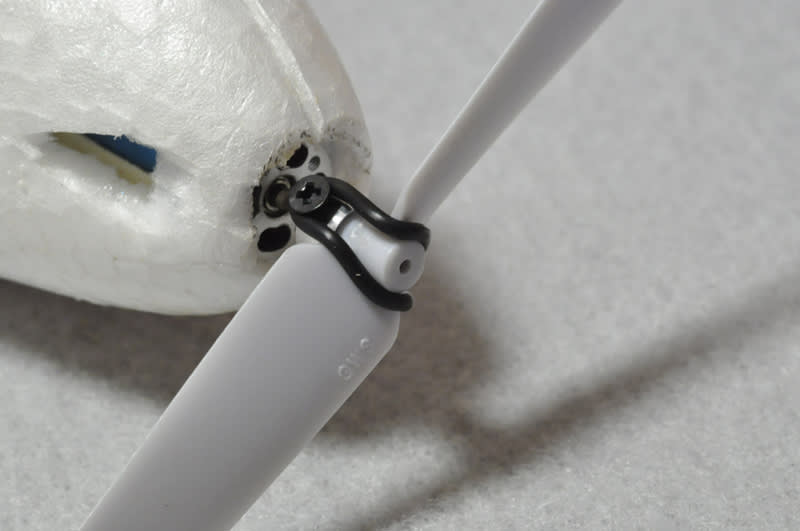
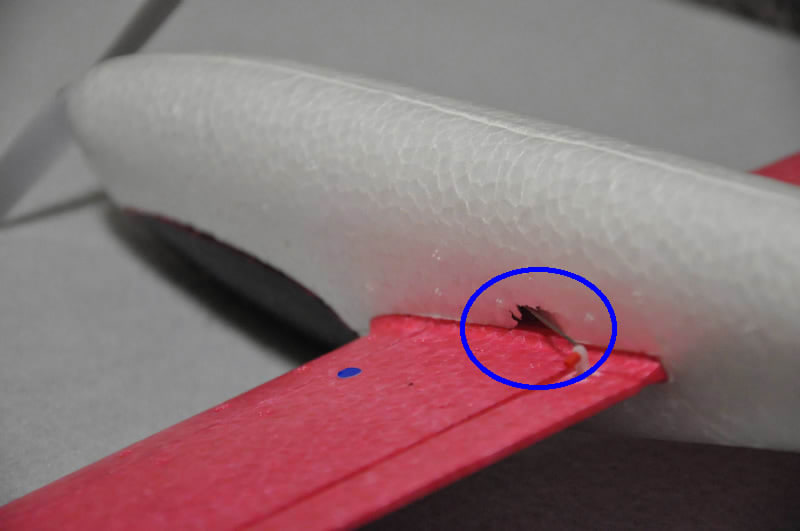
これにより、着陸時にペラがこんな状態になっていても

外れるだけで折れない(折れにくい)ということ。

いやあ、すばらしい!
そして恥ずかしい・・・
Y.Mitaさん、旅ねこさん、ありがとうございました!!
主翼の上にモーターを移して、プッシャータイプに改造しようかと思っていたところ、Y.Mitaさんと旅ねこさんから「プロペラアダプター(セーバー)を使えばよい」とのコメントをいただきました。
プロペラアダプター?
私の頭の中では、モーターシャフト径とペラの穴が異なる場合に使用するパーツという認識だったため「???」状態でした。
「もしかして、破損防止の働きもあるの?」と、旅ねこさんの動画を拝見してみました・・・
「あわわわわ・・・」
こんなに素晴らしい働きをするなんて・・・知らなかった・・・・
そして恥ずかしいことなのですが・・・
持ってました(バカでーす!)
以前、ちびFOX用のペラを買った際に、注文していないのに送られてきたものです。
まじめにショップにその旨連絡したところ、「手違いで混ざってしまったようです。返品しなくて結構ですので、どうぞご使用ください。」とのこと。
その時は「アダプターいらないな・・・」と思っていたのですが、今日になって感謝感謝です。
では早速。
このように取り付けていたものを
プロペラセーバーに変えました。
これにより、着陸時にペラがこんな状態になっていても
外れるだけで折れない(折れにくい)ということ。
いやあ、すばらしい!
そして恥ずかしい・・・
Y.Mitaさん、旅ねこさん、ありがとうございました!!