








イーケイジャパン製のキットの中でも組み立てに時間がかかる
ロボットアームに挑戦してみましょう
ニッパーと足の長いドライバーを用意します

こんなきれいな箱に入っています

ふたを開けると、、、

二重になっていて、その下は、、
こんな感じです

このキットはロボットアームですから物をつかみ回し持ち上げたりします
まずつかむ先の方から順に組んでいくことになります
部品は必要なものだけ外していくようにします
決して最初から全部バラバラにしないことです

つかむところを左右組み立てます

必要なモーター部を切り離します


ピッタリかみ合うように組み付けます

ちゃんと動くか、電池をつないでテストしましょう

今度は回転させます

部品をはめ込んで

タッピングビスで止めます
ひっかかりますが、そのままねじ込みます

クラッチを組み込んで専用モーターセットを取り付けます
パイロットランプも所定のところへはめ込みます
小さなピンが出ているので溝にうまくはめ込みます
ピンが合ってないとフタがしまりません

カバーを付けるとこんな感じになります

真ん中の間接部分です
後で締め付ける長いネジ用のロックナットを入れ忘れないよう
注意します

今度は腕のクラッチ機構を取り付けます
フェルトがクラッチの役をします
ネジはしっかりねじ込む位でいいでしょう
モーターが回っているのに腕が動かない場合は、締め込み不足です
もう少し締込んでみて下さい 動き始めるはずです
ネジはまだまだ目一杯締込んでも大丈夫です↓
ロックナットを入れ忘れていると締め付けできません

黒いシールを貼ります


少し固いですが差し込みます

今度は根元の関節です

一番下のスペーサーを忘れないようにします
ここもかなりしっかり締込むくらいでちょうどよくなります
滑ってうまく腕が上がらない場合は締込んでみて下さい

回転座のスペーサーも忘れずはめ込みます

だいたい形ができました

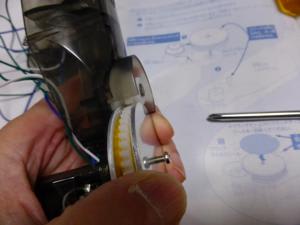
今度は配線です
説明図に従って色分けして金具に差し込みます

きれいに取回します

コントローラーはネジ9本で仕上がります

コントローラが出来上がりました
本体のコネクタに接続しましょう

単三電池4本を入れます

さあ、出来上がりました
組み立て時間は約4時間、お疲れさまでした~♫

























