








pn接合の電圧降下は常温で0.65Vから0.7V程度である。温度係数があって-2mV/Kくらい。
広い温度領域でリニアなようなので、これを積極的に使った温度センサーがある。仕事でもそんな温度センサーをつかっていたことがある。センサーは安価じゃないけどね。
汎用のシリコンダイオードを使って温度計測ができないかと思う次第。まあ、温度係数はわかっているのでいいんだが、シミュレータでやってみようと思った次第。シミュレータも部品のデータの温度係数使うだけだから、まあ、傾向を見る程度にしかなりませんので、ご注意を。特に汎用ダイオードはVFが結構ばらつきますので、常温でのVFをあらかじめ測定しておかないと温度のオフセットが結構でるようです。
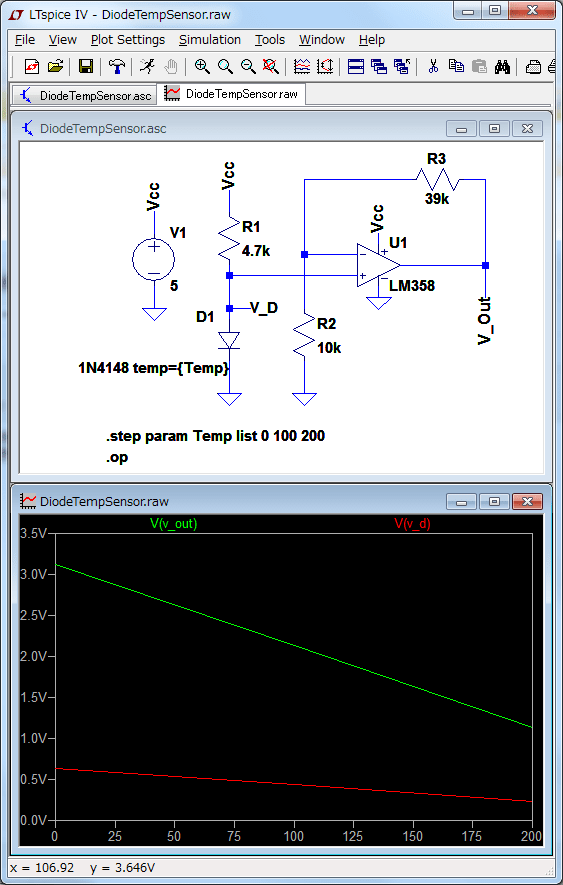
さて、シミュレーター(LTSpiceIV)で個別の部品の温度を設定する方法だが、部品のラベル(1N4148のところ)をクリックして、temp=50と書けば当該部品が50℃の状態のパラメータにしてくれる。
下のように、パラメータのスイープもできる。
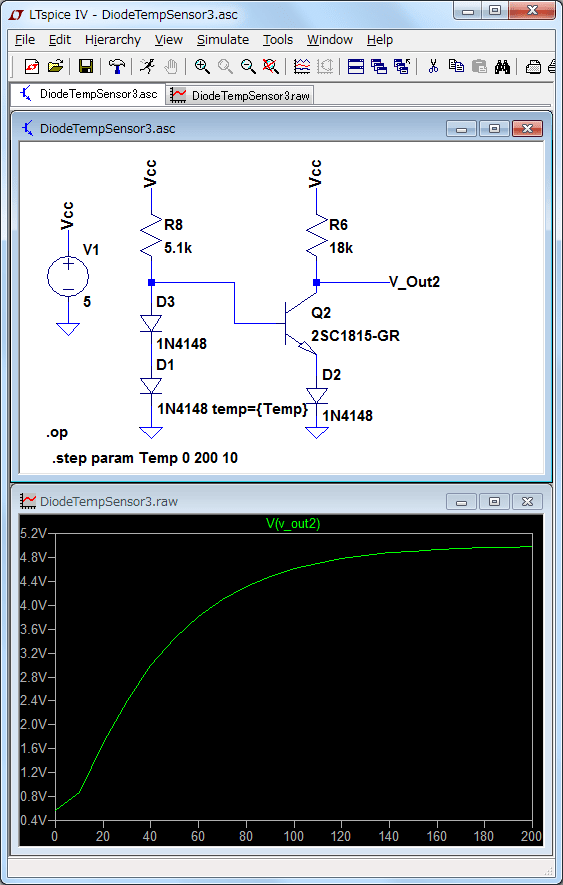
LM358を使おうと思っていたが、トランジスタのVBEも同じ温度係数を持っているので、これを使って別の回路でもうちょっと温度に敏感な電圧変化を得られるものも考えてみた。常温でトランジスタのVBEと同じ程度のバイアスをかけておき、温度が上がるとトランジスタのVBEが下がって、トランジスタがONになっていくというもの。トランジスタのVBEのばらつきでぜんぜん特性が違ってしまう見込みなので、個別にトランジスタの特性を把握しないと、相当な誤差が生じる見込み。
グラフの縦軸は電圧、横軸は温度(℃)

3線引っ張るの面倒だなとおもってこんなのも考えてみた。外に引っ張っていくのはD1のダイオード。いや、ダイオードひとつでいけるんじゃないかと。エミッタのダイオードと抵抗にして、ああやって、こうやって・・・
いや、少なくともダイオードがひとつトランジスタと熱結合してないと気温に敏感になってしまいそうだが・・・下の右側の回路だと、D3とQ2が同じ温度で、D1とD2の温度差がミソなのだ。バイアス電流はいじれるようにしておかないと。D1側のVfを電流で微調節しようとしてるからね。

温度の閾値を50℃くらいにしたいので、50℃で電圧の変化率が大きいものがいいかな。
また後日検討しよう。






