ひずみゲージのアンプの設定は時折悩ましいというか、なれてくるとなんでこの設定なのかと思うときがあるので、設定の考えと標準の設定方法をメモしておく。
取扱説明書を読みながらこれなら使えそうだと到達した設定値である。
ゲージ率を補正しつつ歪1%のとき、1Vを得る。
電圧読み取り値=歪%である。それ以外はこれを基本に何倍かすればよい。以前は電圧測定側のADCをフルレンジ使い切りたいと思っていたが、毎回設定を考えるのが面倒なのと、16bitくらいのADCがあれば別にレンジの20%程度しか使わなくても測定精度は十分なのでシンプルなのが一番だと今は思っている。
ゲージ率は2.00を前提として色々な計算があるが、実際のひずみゲージはこの値にならない(出荷時に測定してゲージ率を記載したシートが入ってる)。なので、補正が必要である。
例えば0.100%歪を測定するとき、ゲージ率が2.00なら補正は不要だが、ゲージ率が2.20とかの値の場合、ひずみゲージが出してくる電圧が1.1倍(=2.20/2.00)になるためアンプの設定を変えないと0.11%歪が出ているように見えてしまう。
ちなみに先日ゲージ率K=2.27というものを見た。値が10%以上違うためゲージ率補正は大事。
サンプルの歪(真の歪)→ひずみゲージの歪(計測した見かけの歪)→アンプ→電圧信号というように3回の変換があるのでアンプの補正は、見かけの歪を真の歪の値に戻すためのもの。
歪みゲージはよく使うのが120オームのものなので、120オームを前提にしているが、別に350オームだっていい。
歪アンプとして想定しているのは共和電業のDPM-911BとにブリッジボックスDBT-120Aを接続した状態。使っているのが共和電業なので共和電業を前提にしているが、他のメーカーでも同じだと思う。
歪アンプはゲージ率2.00固定となっているが、感度調整をデジタルで設定できるので、この値をいじるというわけである。
1ゲージ法で測定する場合ひずみゲージからブリッジボックス、アンプへの配線は次のようになり、赤字で示した部分の設定をいじって適正な出力にする。
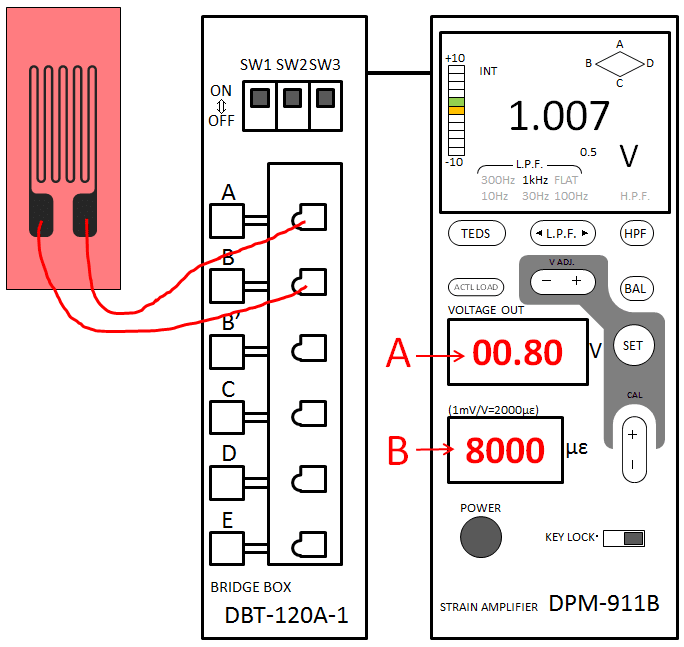
■引張試験など大きな歪測定の場合、引張試験機が±5Vしか電圧を受け付けないときは次の設定を基本にすると
1%歪のときに1V出力が得られる設定になる。
ブリッジ電圧:0.5V (デフォルトの2.0Vだとゲインが低くて設定できないかも)
VOLTAGE OUT:0.80V
歪の設定値:ひずみゲージのゲージファクターに応じて下記の表から選ぶ。

計算式はゲージ率をKとすると、8000*K/2 = 4000Kである。ゲージ率1.89のひずみゲージは4000*1.89=7560となる。上の早見表を歪みアンプの側面に貼っておくなどすると便利かもしれない。
とりあえず、以上でデータロガーなどで記録する電圧がそのまま歪[%]として記録されるので便利である。
DPM-911Bはフロントパネルにメカスイッチとして設定値が表示されているので、設定値をいつでも確認できる。これは地味に大事。
データロガーやオートグラフ側でゲージ率補正すると設定を呼び出して確認しないと値の確認ができないのが何年。私はあれ、ちゃんと設定したっけ?と不安になる。
・ひずみゲージはだいたい2%程度の歪まで対応(ただし、その前に剥がれる場合が多いと思う)
・ひずみゲージのゲージ率の精度がせいぜい1.5%なので、それ以上の精度の測定は難しい(別途校正が必要)
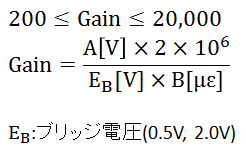
・歪みアンプの設定可能なゲインの範囲は200から20,000であるので、下記の式で設定が適正か確認する。
設定できないゲインを入力するとエラーなるので、設定ミスは生じないが、なんでエラー?ってなるので。
EB=0.5V, A=0.80V, B=8000μεなら、ゲインは400であるので、問題ない。A=8.0Vでもゲイン8000なので大丈夫。
以下余談
装置の暖気は大事。測定1時間前には電源を入れておいたほうがいい(取扱説明書の通り)。中の回路の温度が変化するとドリフトする。
歪の値は、上記のように8000μεとか、μst (micro strain)、ust (μをuに書き換える)といったあたかも単位があるような表記をする。
しかし、歪は無次元の値である(ε=⊿L/L)。メートル/メートルなので無次元。
なので、初めてこのμεというものに出会ったとき、μはわかるが、εって何?と混乱した。
今思えば単位がない値は「ただの比率」であり、重さの比なのか、長さの比なのかわからないので、歪の場合は、εをつけて「歪ですよ」としているだけである。
εは物理でいうmやAのような単位ではない。
上記では0.8V:8000μεとしたが、8000の部分をできるだけ大きな値にしたかったが、0.9V:9000μεとすると、ゲージ率が小さいところで設定値が10,000になり、設定できなくなる。
DPM-911Bはブリッジ0.5Vのときは、Aの設定可能範囲は0.1-10Vなので0.1-0.8Vの範囲で最大値を選んだ次第。0.85:8500でもいいがキリが悪い。
ブリッジ2Vのときは1-10Vで1V未満が設定できない(ブリッジ電圧は低いほどゲージに流れる電流が小さく、発熱が小さくなる=もともと僅かな熱影響がもっと軽減、実際影響するかな?)
ちなみに、DPM-911Bは2.5kHzまでの帯域に対応している(ブリッジを10kHzの交流で動かしている、初めて知ったときは頭いい!と思った)もので、これ以上の周波数の信号には適応できない。
交流で増幅しているのでアンプが安定すればドリフトにも強い。
これ以上高速の信号に対してはブリッジをDCで動かしている500kHzまで対応するアンプがある(シグナルコンディショナという)。
DPM-911Bは上のイラストではそこそこ再現したつもりだが、実物は次のような外観。出力電圧値はデジタル7セグ表示です。

このアンプ、結構お値段高い(20万くらい)のだが、なかなか高性能。ヤフオクで1万円で買ったけど。
バランスとるのはBALボタンをダブルクリックで済むし、アンプのゲインはデジタルのダイヤルで自在。
AC100Vでも動くし、鉛電池でも動く。デジタルとアナログをうまく組み合わせてるんだろうな。
2020/10/17 表が間違ってたので訂正















