何にせよ我々にとって、というかわが素人哲学にとって関心があるのは、人間の心的領域の全体構造というか成り立ちの解明、ジョン・サールの表現を借りるなら「陽子(proton)から大統領(president)まで、電子(electron)から選挙(election)まで」隈なく議論の対象にできるような、体系として一貫性のある理論モデルの構築ということである。ただ、心的領域の基底系はどう考えてもフーリエ基底系のような、たかだか1パラメタの基底関数で全体を包括できるような単純な成り立ちはしていない(だろう)というばかりである。
その素人哲学のプロジェクトにおいて、この問題、つまり「なぜ(外界には)何もないのではなく、何かがある(我々はそのように外界を見る)のか」の認識論的な問いは、人間がその外界にあるものを道具とするため、あるいは支配するために(文字通りに、あるいは比喩的に)「手を伸ばしてそれを掴み取る」こと、実際にそれが可能であることの根拠にかかわってくる。
もしも外界が認識論的な暗闇だったら、そうしたことは当然まったくできない。幸い、現に我々にとっての外界は実際に認識論的な暗闇などではないが、なぜそうではないのかの根拠は、普通に(たいていは誤って)そう思われているほど自明ではない。
非常にきつい制約を加えた状況下でロボットに目の前(?)の物体を認識させ、アームを伸ばして掴み上げる動作をプログラムする、これはすでに実現されているし、工業生産の現場などで広く利用されてもいる技術であるが、本当は前世紀の工学技術知識の集大成と言ってもいいくらい大変な達成である。どのくらい大変かというと、これがどうしてできるかをすっかり理解するためには、今でも工学系大学院の博士課程水準の知識と、それら全部を体系づけて理解するだけの学習時間が必要な程度に大変である(笑)。
ところがその一方において、人間ならよほどのボンクラでも軽々とやってのけるように、これといった制約のない、人間にとっては日常のごくありふれた状況下で同様の動作を達成する、またそれをプログラムすることは、ロボットにはまったく不可能である。これは前述の水準の知識と理解をもつものの間に限っては非常によく知られた事実である(フレーム問題)。
早い話が、いわゆる「汎用家事ロボット」のようなものは作れないか、もし作れたとしたら、それは人間が居住する家屋や居住する人間の生活様式の方が、ロボットが導入された工場やその製造組立工程と同様に、逸脱の許されない厳格な規格と規則と制約だらけの何かに作り替えられた時だけだということである。
巧妙に狭く限定づけられた状況のもとで、よくプログラムされたそれが動作しているところの外見からはそうは見えないかもしれないが、つまり「認識論的な暗闇」とはまさしくロボットが(そしてそのロボットを介して課題に向き合うプログラマが)置かれている状況のことなのである。ロボットに意志はないがプログラマにはある。だから暗闇に手を伸ばす(ようにプログラムする)ことはできるし、その手に取り付けられたセンサが感知した内容に応じて動作する(ようにプログラムする)こともできる、けれども、何をどうしようとも「暗闇を晴らす」ことだけはできないのである。
●
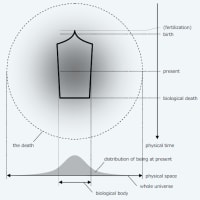
我々が目の前の物体を、その周辺(背景)から区別されたコンパクト(有界閉)領域、すなわち対象物として認めることができるためには、視覚(一般に感覚器)から得られる平面的な像だけでは十分ではなく、その平面から飛び出た外に──哲学っぽい言い方をすれば「感覚を超越したところに」──いまかりに〈秩序〉とでも呼ぶべき1点、ないしはコンパクトな閉領域をもつことが必要である。この図式が何に似ているかと言えば、実は我々自身が自然から自分を区別することに一番似ている。つまり、我々は自分自身を自然から区別するように、対象物をその背景から区別して認識している。この意味で、心的領域の上に認められる対象は、どんな場合でも自分自身の外界への投影像として「そこにある」のである。
ロボットには手に負えない「フレーム問題」が手に負えない根本の理由は、置かれた状況における可能性の選択肢が無限で、これを縮約する手段も算法上存在しないからである。選択肢がたかだか有限個であるなら(それにしてもあまり多数になると困難が増しはするが)フレーム問題は原理的に解決可能だということになる。そして無限個の選択肢をたかだか有限個に縮約することは位相空間論におけるコンパクト化(compactification)の操作そのものである。認識論的な暗闇を晴らしているのもそのコンパクト化だと言いたいわけだが、それが人間にはしごくあっさりと可能で、機械にはどうやっても可能でない、その根拠は、コンパクト化のための超越的な1点(もしくはコンパクト閉領域)を人間は自らの事実存在としてもつが、機械はそれを持たないということに求められる。
その素人哲学のプロジェクトにおいて、この問題、つまり「なぜ(外界には)何もないのではなく、何かがある(我々はそのように外界を見る)のか」の認識論的な問いは、人間がその外界にあるものを道具とするため、あるいは支配するために(文字通りに、あるいは比喩的に)「手を伸ばしてそれを掴み取る」こと、実際にそれが可能であることの根拠にかかわってくる。
もしも外界が認識論的な暗闇だったら、そうしたことは当然まったくできない。幸い、現に我々にとっての外界は実際に認識論的な暗闇などではないが、なぜそうではないのかの根拠は、普通に(たいていは誤って)そう思われているほど自明ではない。
非常にきつい制約を加えた状況下でロボットに目の前(?)の物体を認識させ、アームを伸ばして掴み上げる動作をプログラムする、これはすでに実現されているし、工業生産の現場などで広く利用されてもいる技術であるが、本当は前世紀の工学技術知識の集大成と言ってもいいくらい大変な達成である。どのくらい大変かというと、これがどうしてできるかをすっかり理解するためには、今でも工学系大学院の博士課程水準の知識と、それら全部を体系づけて理解するだけの学習時間が必要な程度に大変である(笑)。
ところがその一方において、人間ならよほどのボンクラでも軽々とやってのけるように、これといった制約のない、人間にとっては日常のごくありふれた状況下で同様の動作を達成する、またそれをプログラムすることは、ロボットにはまったく不可能である。これは前述の水準の知識と理解をもつものの間に限っては非常によく知られた事実である(フレーム問題)。
早い話が、いわゆる「汎用家事ロボット」のようなものは作れないか、もし作れたとしたら、それは人間が居住する家屋や居住する人間の生活様式の方が、ロボットが導入された工場やその製造組立工程と同様に、逸脱の許されない厳格な規格と規則と制約だらけの何かに作り替えられた時だけだということである。
巧妙に狭く限定づけられた状況のもとで、よくプログラムされたそれが動作しているところの外見からはそうは見えないかもしれないが、つまり「認識論的な暗闇」とはまさしくロボットが(そしてそのロボットを介して課題に向き合うプログラマが)置かれている状況のことなのである。ロボットに意志はないがプログラマにはある。だから暗闇に手を伸ばす(ようにプログラムする)ことはできるし、その手に取り付けられたセンサが感知した内容に応じて動作する(ようにプログラムする)こともできる、けれども、何をどうしようとも「暗闇を晴らす」ことだけはできないのである。
●
我々が目の前の物体を、その周辺(背景)から区別されたコンパクト(有界閉)領域、すなわち対象物として認めることができるためには、視覚(一般に感覚器)から得られる平面的な像だけでは十分ではなく、その平面から飛び出た外に──哲学っぽい言い方をすれば「感覚を超越したところに」──いまかりに〈秩序〉とでも呼ぶべき1点、ないしはコンパクトな閉領域をもつことが必要である。この図式が何に似ているかと言えば、実は我々自身が自然から自分を区別することに一番似ている。つまり、我々は自分自身を自然から区別するように、対象物をその背景から区別して認識している。この意味で、心的領域の上に認められる対象は、どんな場合でも自分自身の外界への投影像として「そこにある」のである。
ロボットには手に負えない「フレーム問題」が手に負えない根本の理由は、置かれた状況における可能性の選択肢が無限で、これを縮約する手段も算法上存在しないからである。選択肢がたかだか有限個であるなら(それにしてもあまり多数になると困難が増しはするが)フレーム問題は原理的に解決可能だということになる。そして無限個の選択肢をたかだか有限個に縮約することは位相空間論におけるコンパクト化(compactification)の操作そのものである。認識論的な暗闇を晴らしているのもそのコンパクト化だと言いたいわけだが、それが人間にはしごくあっさりと可能で、機械にはどうやっても可能でない、その根拠は、コンパクト化のための超越的な1点(もしくはコンパクト閉領域)を人間は自らの事実存在としてもつが、機械はそれを持たないということに求められる。