








これの続き
一般に疾走時には、足を接地する度に体の重心は水平方向に減速と加速を繰り返している。
平均して等速運動してるように思えるのは、接地ブレーキと推進力の大きさがほぼ同じとき。
同じ速さで等速運動するなら、減速/加速の大きさが小さいほど省エネで走れるということになる。
接地ブレーキを極限まで小さくできればどこまでも加速できるのか? という発想については論点がずれるのでとりあえず置いといて…
果たして、減速/加速の大きさはどの程度か。
これを調べるには、前回やった方法で、そのままWiiリモコンの水平方向の加速度センサの値を取得すればいい。
実験に使ったC#ソースはこちら
前と同じ条件でやってみた。下図は、スタンディングからの走り出し数歩のデータ。
Wiiリモコンは右手で持って骨盤の右側に密着。プラスが進行方向。
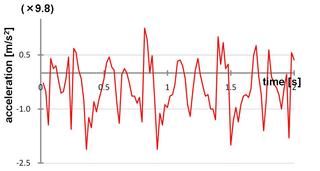
加速段階のはずだけど平均して水平方向加速度がマイナスな気がするのは、たぶんリモコンが微妙に傾いてたからかもしれない。
まず、Wiiリモコンは右側の腰だったから、一番大きく減速してるところが右足の接地開始部分のはず。
そこから加速のピークまでが右足接地に対応するとして、その次の減速がたぶん左足の接地。
で、そこから加速が二段階ある。
一発目がいわゆる「乗り込み」? それでまた減速して(?)二発目がたぶん左足の離陸?
まだちょっと謎。
???↓

にしては、滞空時間が短すぎる気がするけど、走り出しだからこんなもんなのか。
ちなみに、歩行時の水平方向加速度はこんなだった↓。

こっちは分かりやすい。
中間疾走時のデータについては、波形がちょっとnoisyでうまく解釈できないので、またこんどきれいに測れたときに。
データが自分のだけなので他の人との比較してどうとかは言えないけど、最初のグラフが正しいとして、この2秒間で重心に加わった力の絶対値を積分して、仮にこの間に15m進んだなら、要したエネルギーは単純計算で(鉛直方向の運動は無視)
66.9[m/ss]/100×66[kg]×15[m]=6.6×102[J]
これは、150[cc]の水の温度を約1[℃]上昇させる熱量に相当する。
仕事率は 330[W](≒0.45馬力)。要するにこの数値が小さいほど省エネで走れていることになる。
…合ってる?


一般に疾走時には、足を接地する度に体の重心は水平方向に減速と加速を繰り返している。
平均して等速運動してるように思えるのは、接地ブレーキと推進力の大きさがほぼ同じとき。
同じ速さで等速運動するなら、減速/加速の大きさが小さいほど省エネで走れるということになる。
接地ブレーキを極限まで小さくできればどこまでも加速できるのか? という発想については論点がずれるのでとりあえず置いといて…
果たして、減速/加速の大きさはどの程度か。
これを調べるには、前回やった方法で、そのままWiiリモコンの水平方向の加速度センサの値を取得すればいい。
実験に使ったC#ソースはこちら
前と同じ条件でやってみた。下図は、スタンディングからの走り出し数歩のデータ。
Wiiリモコンは右手で持って骨盤の右側に密着。プラスが進行方向。
加速段階のはずだけど平均して水平方向加速度がマイナスな気がするのは、たぶんリモコンが微妙に傾いてたからかもしれない。
まず、Wiiリモコンは右側の腰だったから、一番大きく減速してるところが右足の接地開始部分のはず。
そこから加速のピークまでが右足接地に対応するとして、その次の減速がたぶん左足の接地。
で、そこから加速が二段階ある。
一発目がいわゆる「乗り込み」? それでまた減速して(?)二発目がたぶん左足の離陸?
まだちょっと謎。
???↓
にしては、滞空時間が短すぎる気がするけど、走り出しだからこんなもんなのか。
ちなみに、歩行時の水平方向加速度はこんなだった↓。
こっちは分かりやすい。
中間疾走時のデータについては、波形がちょっとnoisyでうまく解釈できないので、またこんどきれいに測れたときに。
データが自分のだけなので他の人との比較してどうとかは言えないけど、最初のグラフが正しいとして、この2秒間で重心に加わった力の絶対値を積分して、仮にこの間に15m進んだなら、要したエネルギーは単純計算で(鉛直方向の運動は無視)
66.9[m/ss]/100×66[kg]×15[m]=6.6×102[J]
これは、150[cc]の水の温度を約1[℃]上昇させる熱量に相当する。
仕事率は 330[W](≒0.45馬力)。要するにこの数値が小さいほど省エネで走れていることになる。
…合ってる?