《宇宙開発物》
ロボット
変形するおもちゃの技術

H3ロケット(NO2)
費用を抑え
ロケットの小型化を目指す

探査機(SLIM)を
ロケットの先端に載せる
・・・・・・・・・・・・
打ち上げ成功
2024.2.17(土)

「H3」2号機
種子島宇宙センター
打ち上げ成功 (Am9:22)
・・・・・・・・・・・・
JAXAは1号機の失敗から
ロケットを 小型軽量にし
2号機はコストを低減


「月探査」

世界が目指す「月」
アルテミス計画
アメリカ合衆国連邦政府が出資
有人宇宙飛行計画です
2025年以降に月面に人類を送り
その後 月に物資を運び
月面に拠点を建設 月での人類の
持続的な活動を目指します
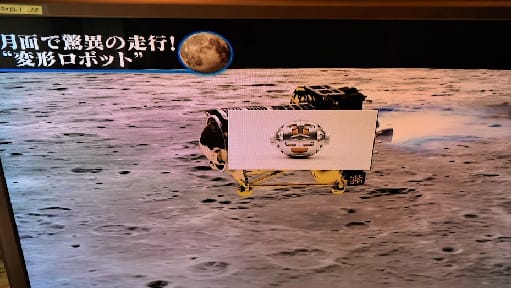
変形ロボット
探査機(SLIM)に搭載
「ロボット」はカメラマン役


ロボットは
「月面の砂」を進む
・・・・・・・・・・・・
おもちゃ会社
「タカラトミー」
おもちゃ職人の技が
宇宙開発に役立つ

人型ロボットの技術
変形するおもちゃの技術を参考
↓
2022年3月
人型ロボット利用
探査機(SLIM)に搭載
小型で軽量化した技術は
「小型ロボット」に応用
2022年3月発射
↓
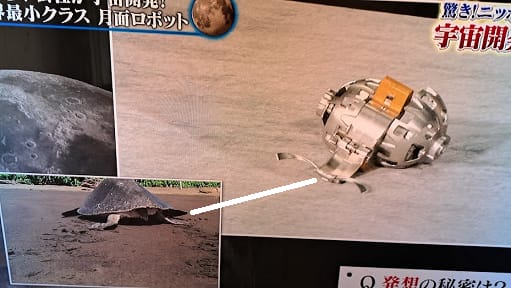
小型ロボット
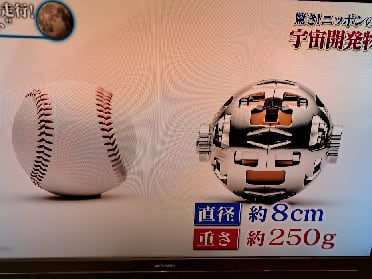
探査機(SLIM)に搭載
直径..8㎝
重さ..250g
小型で軽く シンプル設計
斜面30℃の傾斜..月面の砂の上
右に左に形を変え..動く
↓
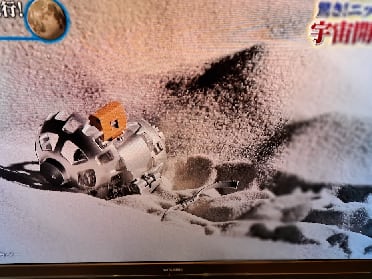
「ウミガメ」の後ろ足の役目
後ろ足がロボットのお尻につく
月面で左右に開き
走行モードに一瞬で変形する
右に左に 形を変え進む
傾斜30℃の月面を動く
着陸の探査機(SLIM)を 撮影
↓↓
ロボット
・・・・・・・・・・・・
バタフライ走行
前に進む力
クロール走行
左右に砂をかく
・・・・・・・・・・・・
↓

タカラトミーの技術
「小型ロボット」
月面をすすむ
↓

探査機(SLIM)を撮影
ロボットに搭載された
「2機のカメラ」で撮影
友人月面探査~火星探査へ
「宇宙開発が 始動」
・・・・・・・・・・・・
月面に基地を建設
中国~ヨーロッパ~インド~
イスラエル..世界各国が宇宙開発
に挑戦している
・・・・・・・・・・・・
NHKB.S
「宇宙開発物語」より
・・・・・・・・・・・・
・・・・・・・・・・・・
「アルテミス計画」
想定 スケジュール

2025年には
女性と有色人種による月探査
2040年以降は火星探査の 計画
・・・・・・・・・・・・
2024.3.17(日)発表

コメント参照