とうとうチーチ3号もアセンブリ工程に差し掛かる。
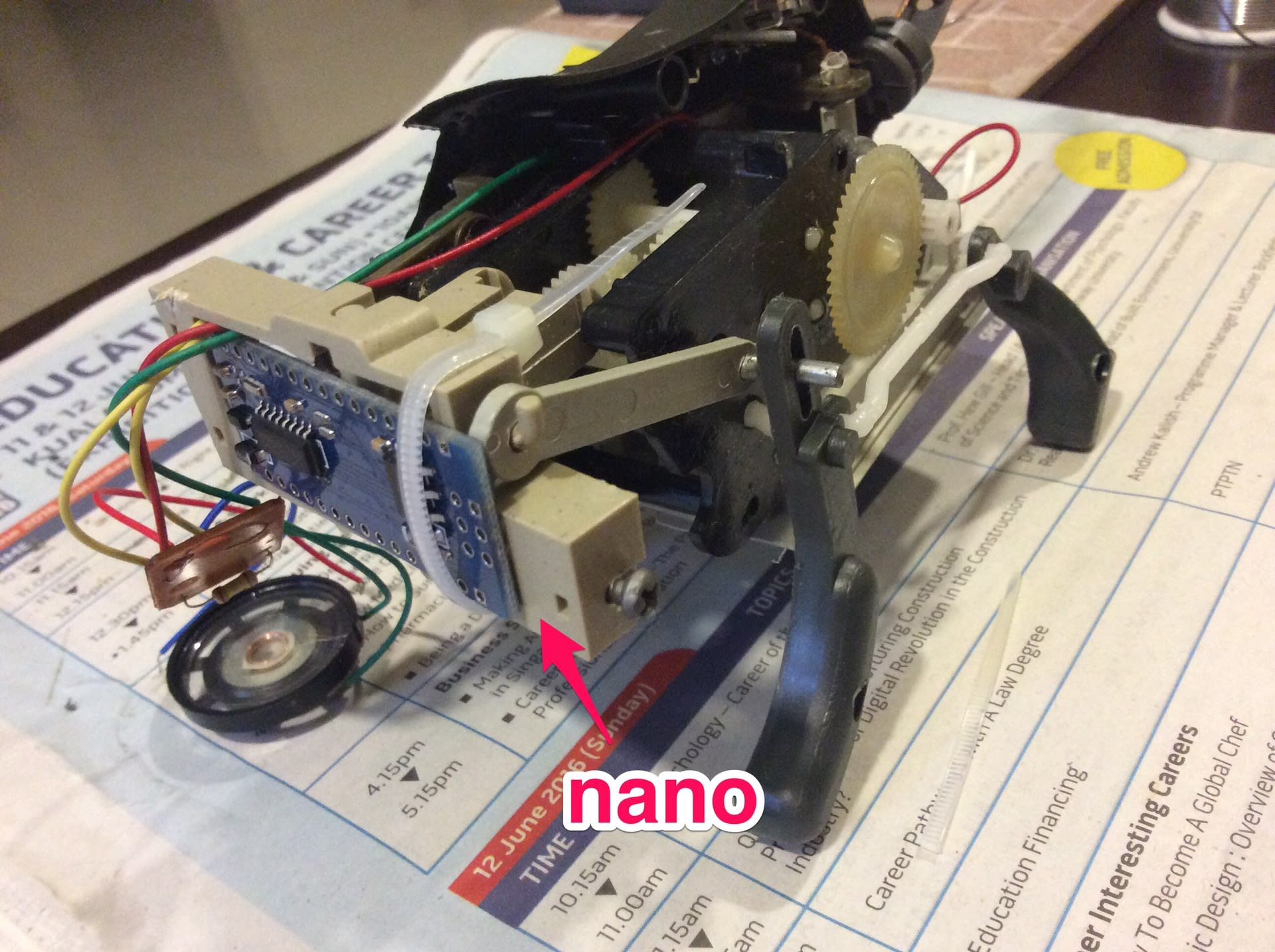
当初、アゴの中に入れようと思っていたWTV020SDオーディオモジュールは
nanoの下のところに取り付ける事になった。
アゴの中だと収まりが悪かったから。
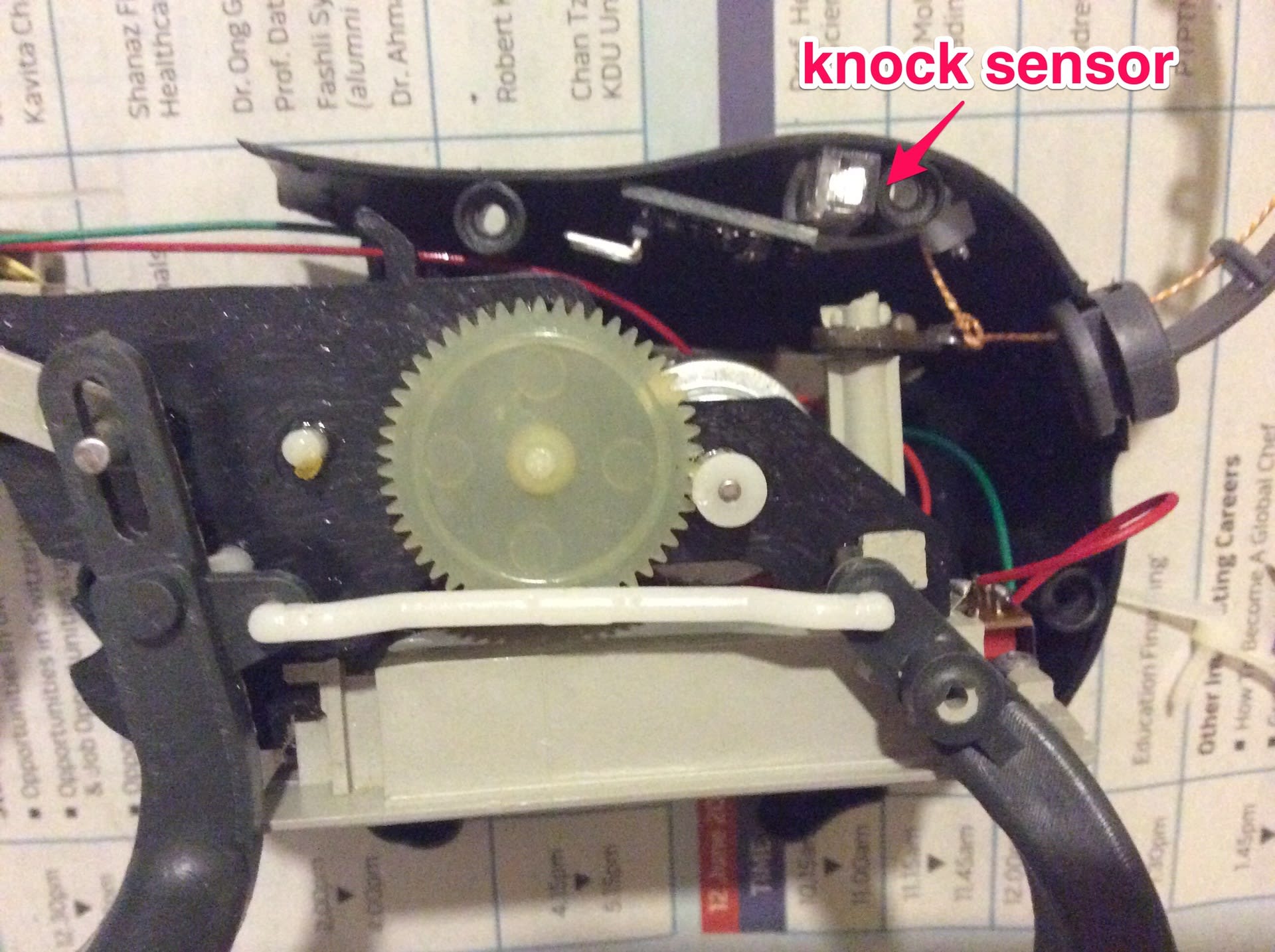
さて、動作確認だけれども、LEDの光らせ方をノックセンサーからの割込みで変えるわけだけれど、
やってみると全然ダメ。
7月9日の時にスケッチだけ書いておいてテストするの忘れてた。
絶対上手くいくと信じてたから。
が、ダメだ。
あれっ、センサー壊れたか?、と思った。
なぜかと言うと、テスター当てながらノックしても反応無し。
なので、もう1個買ってあったのに交換。
結果、…全く変わらない。
わからん。
確か、Vccと出力を反対につないでいた人がいたなと思い出しやってみる。
関係ない。
わからん。
と、よく考えてみるとこのセンサー、テスターでは反応しない位に素早くON-OFFが変化するのでは?
だってセンサー本体の中身はバネだ。
って事は、センサーじゃなくてスケッチの問題か?
ノックセンサーは5VがGNDに落ちるスイッチみたいなものだから
いくら初心者のプログラミングとは言え間違いようがないはず。
とすると、割込みのところじゃないか?
検索していくら調べても間違ってない。
なぜだ?
いくら考えてもわからないので近所のAEONに歩いて行って何か食べて気分転換する事にした。
ゲートを出て、道路を渡って駐車場に入る。
何だかいつもより車が少ない。
ハリラヤが終わって週末はみんなオープンハウスで友達の家廻りでもしてるのか?
そんな事どうでも良い。
フードコートに行くが、その手前のAEONの寿司と弁当売り場が今日は早い時刻から3割引だ。
チキンカレー弁当、RM4.7が3割引いて…RM3.29って事は、何と87円ほどじゃないか!
と、フードコートに行く前にメニュー、決まる。
まあ、街の食堂で食べるほど美味いわけじゃないのだけど、安いから許す。
せっかく来たのでAEONのパン屋の安売りドーナツも1個食べる。
食べながらどうにも気になるのでiPadで割込みのところ検索。
検索、検索、ケンサク、ケンサク、健作……とりゃ〜!
おっ………
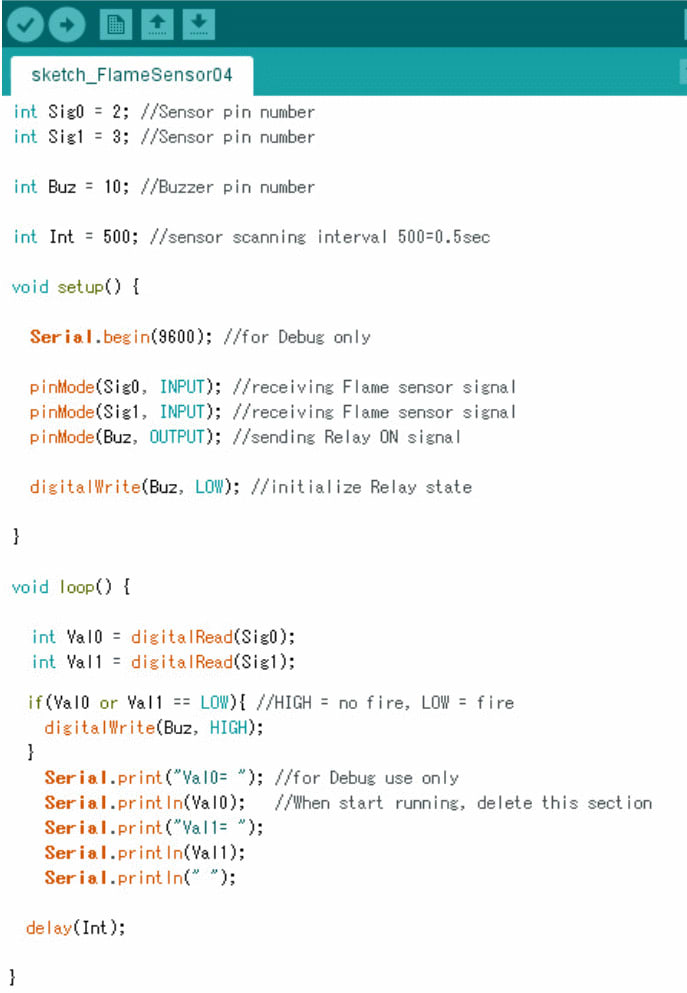
ネットに上がってるスケッチを観察すると、変な事がわかった。
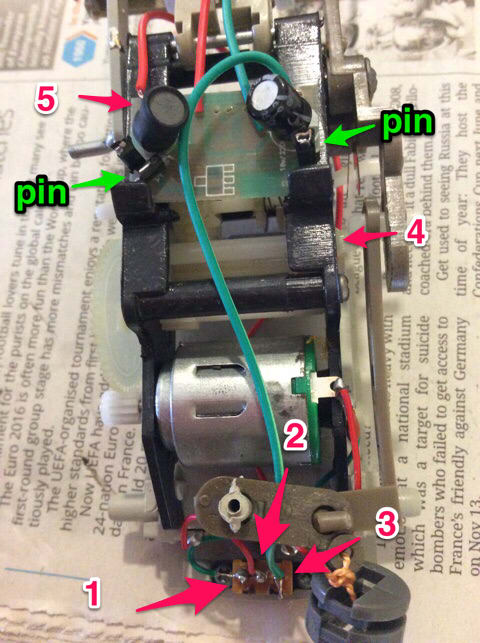
attachInterrupt( 0 ←ここがどのスケッチでも"0"になっている。
おかしいだろ!
Unoでもnanoでも割込みに使えるピンは2番と3番と書いてるのに!
……そうか、このゼロは、プロセッサ本体のピン番号だ!
でも、変だ。他のところはArduinoのピン番号なのに割込みだけプロセッサの番号なのか?
で、調べると確かにそうらしい。
変なの!
さらに調べると、ゼロの代わりに、
digitalPinToInterrupt(Arduinoのピン番号)と書けば他と同じArduinoのピン番号でできるとか。
そんなのわかるかテメー!
と言うわけでやってみると確かにノックセンサー、ちゃんと反応する。
LEDの光り方を変えられる。
…今日はそこまで。
こんな事やっていたから今日は猫たちを散歩に連れて行かなかった。
欲求不満で夜起こしに来るかもしれない。
おやすみなさい。
当初、アゴの中に入れようと思っていたWTV020SDオーディオモジュールは
nanoの下のところに取り付ける事になった。
アゴの中だと収まりが悪かったから。
さて、動作確認だけれども、LEDの光らせ方をノックセンサーからの割込みで変えるわけだけれど、
やってみると全然ダメ。
7月9日の時にスケッチだけ書いておいてテストするの忘れてた。
絶対上手くいくと信じてたから。
が、ダメだ。
あれっ、センサー壊れたか?、と思った。
なぜかと言うと、テスター当てながらノックしても反応無し。
なので、もう1個買ってあったのに交換。
結果、…全く変わらない。
わからん。
確か、Vccと出力を反対につないでいた人がいたなと思い出しやってみる。
関係ない。
わからん。
と、よく考えてみるとこのセンサー、テスターでは反応しない位に素早くON-OFFが変化するのでは?
だってセンサー本体の中身はバネだ。
って事は、センサーじゃなくてスケッチの問題か?
ノックセンサーは5VがGNDに落ちるスイッチみたいなものだから
いくら初心者のプログラミングとは言え間違いようがないはず。
とすると、割込みのところじゃないか?
検索していくら調べても間違ってない。
なぜだ?
いくら考えてもわからないので近所のAEONに歩いて行って何か食べて気分転換する事にした。
ゲートを出て、道路を渡って駐車場に入る。
何だかいつもより車が少ない。
ハリラヤが終わって週末はみんなオープンハウスで友達の家廻りでもしてるのか?
そんな事どうでも良い。
フードコートに行くが、その手前のAEONの寿司と弁当売り場が今日は早い時刻から3割引だ。
チキンカレー弁当、RM4.7が3割引いて…RM3.29って事は、何と87円ほどじゃないか!
と、フードコートに行く前にメニュー、決まる。
まあ、街の食堂で食べるほど美味いわけじゃないのだけど、安いから許す。
せっかく来たのでAEONのパン屋の安売りドーナツも1個食べる。
食べながらどうにも気になるのでiPadで割込みのところ検索。
検索、検索、ケンサク、ケンサク、健作……とりゃ〜!
おっ………
ネットに上がってるスケッチを観察すると、変な事がわかった。
attachInterrupt( 0 ←ここがどのスケッチでも"0"になっている。
おかしいだろ!
Unoでもnanoでも割込みに使えるピンは2番と3番と書いてるのに!
……そうか、このゼロは、プロセッサ本体のピン番号だ!
でも、変だ。他のところはArduinoのピン番号なのに割込みだけプロセッサの番号なのか?
で、調べると確かにそうらしい。
変なの!
さらに調べると、ゼロの代わりに、
digitalPinToInterrupt(Arduinoのピン番号)と書けば他と同じArduinoのピン番号でできるとか。
そんなのわかるかテメー!
と言うわけでやってみると確かにノックセンサー、ちゃんと反応する。
LEDの光り方を変えられる。
…今日はそこまで。
こんな事やっていたから今日は猫たちを散歩に連れて行かなかった。
欲求不満で夜起こしに来るかもしれない。
おやすみなさい。