








お久しぶりです。せきしょーです。
今回は、東京大学の総合図書館を制作したので、その紹介記事になります。後半は比較的細かい部分の話が多いので、なんだか色々工夫しているんだなーと思っていただければ幸いです。
今回は、僕が作品の統括と土台などの設計を担当し、さくらもちくんが総合図書館の設計を担当しました。
…
さて、今回作製しました総合図書館ですが実際の見た目はこんな感じです。

(僕のスマホの画角では全体を収めるのは難しかったので見切れていますがご容赦いただけたらと思います。)
画像を見て気がつく方もいると思いますが、建物の見た目は、同じ構造の繰り返しになっています。繰り返し構造のある作品は、それをうまく利用することで設計や組み立ての作業量が減るため作りやすいです。今回も繰り返し構造が多いので作りやすいのかなと思ったのですが、物事はそう簡単に思い通りに行かないですね。かなり苦労しました...
以下、それぞれの部分について紹介していきたいと思います。
まずは土台から。
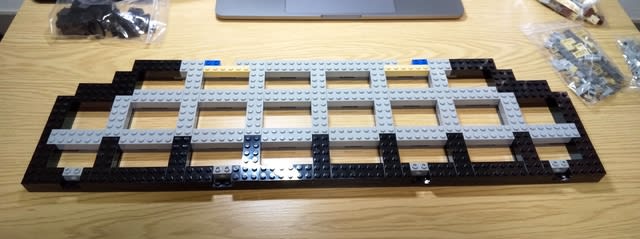
プレートで下地を作り

ブロックを積んで、

プレートとタイルを貼って完成です。
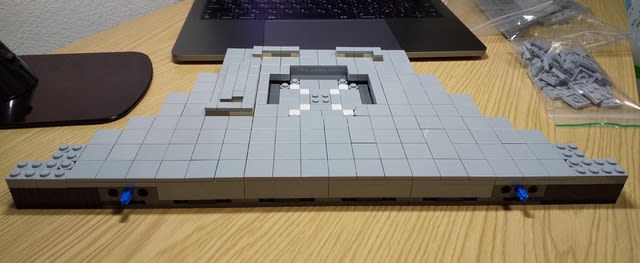
中央のくぼみは図書館前広場にある噴水を設置するために開けてあります。また、噴水周りのベンチも再現しました。
続いては噴水です。
こんな感じで同じものを4つ作り、

くっつけたら、

完成です。

もう少し細かいところまで表現できれば良かったのですが、この大きさではこれが限界でした。
最後に土台に噴水をはめ込んで、公園前広場の完成です。

一応噴水の底の模様などもタイルの色を変えることで表現してみたのですが、あまり見えないですね。普段のレゴ部の大型作品では、土台が四角いものが多いですが、今回は広場が単調な雰囲気になってしまうのを避けるために、土台を扇型にしてみました。また、タイルで石張の舗装を、プレートでコンクリートの表現をしてみました。
今度は図書館側の土台です。
こちらも先ほどと同様に、プレートとブロックを積んで、
プレートとタイルを貼って完成です。

さて、いよいよメインの総合図書館の組み立てです。設計や組み立てにかなり苦労したのですが、細かい話なのでまずは完成していく様子を。
繰り返し構造を意識しながら組んでいきます。
プレートにスロープをつけて、

それを固定する部分を作り、

先ほどのパーツで挟み込むように固定すれば、繰り返し部分の完成です。

透明のパーツの高さが、正面と側面で0.5プレートずれていますが、まあそこまで気にならないですし、これを解消しようとすると、かえって全体のバランスが悪くなったり、強度が弱くなったりしてしまうので仕方ないでしょう。
これを4つ組んで、間の柱を組んで接続すれば、



向かって左側の部分の完成です。
裏側はこんな感じです。
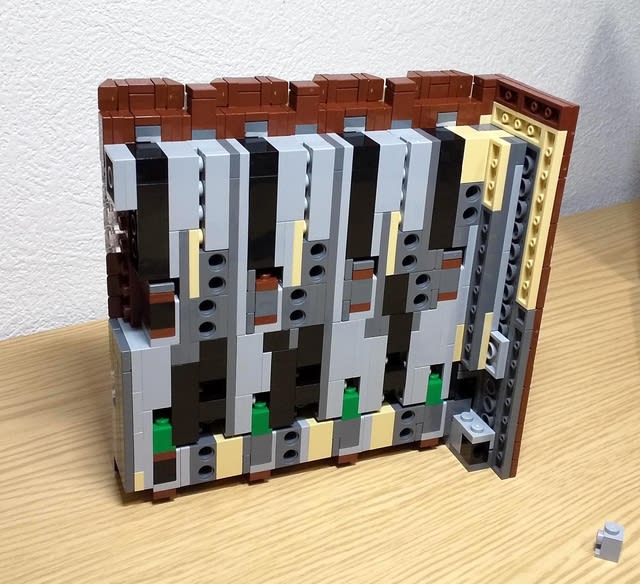
正面のシンプルな見た目からは想像ができないほど入り組んでいます。なぜこのような構造になったかとかはまた後ほど設計者のさくらもちくんに語ってもらいたいと思います。
反対側はこれと同じものを左右反転させて組むだけなので割愛します。
最後に正面部分です。これも基本的には先ほどと同様の組み方をしていきますが、繰り返しの数が違っているので、見た目は変わりませんが裏側はそれなりに変わってきます。
先ほどと同様の構造を色を変えて組み、

これを5個組み合わせれば、

正面部分の完成です。
横から見るとこんな感じです。

裏側はこんな感じです。

入り組んでいるので組むのがかなり大変でした。
最後に玄関部分です。ここは制作の過程を撮影するのを忘れてしまったので、完成した状態を。

スロープと呼ばれる三角のパーツを使って入り口のアーチを再現しています。
さて、全てのパーツが揃ったのでこれらを組み合わせていきます。

それぞれの部分を組み合わせて、

裏側のテクニックブロックにペグを挿し、

上の画像のような建物を支える土台とくっつけ、土台に乗せれば、

完成です。
それでは図書館の構造についての解説を、設計してくれた、さくらもちくんにしてもらおうと思います。
…
図書館本体の設計を担当したさくらもちです。本体の設計と言っても、せきしょーさんのラフの段階で表面のデザインはほとんど完成していたため、私がやったことは、表面のディティールアップと作品としてきちんと接続されるように中身を設計することです。
まずは本体全体のモジュール分割を考えました。共同作業ではよくやることなのですが、単に1個体として設計するのではなく、モジュールごとに設計し、最後にそれらのモジュールをがっちゃんこするやり方です。
今回設定したモジュール単位は以下の通りです。
・本体中央

・本体左

・本体右

・玄関

・中間土台

モジュール同士の接続は以下のような形をとります。強度面から接続にはペグを使います。ただし玄関と本体中央の接続には不本意ながら一部ポッチ接続を採用しました。

次に表面のディティールアップを紹介します。
1. 爪の利用

このサイズの爪には、ポッチの横にあるタイプとポッチから下に伸びているタイプがあります。
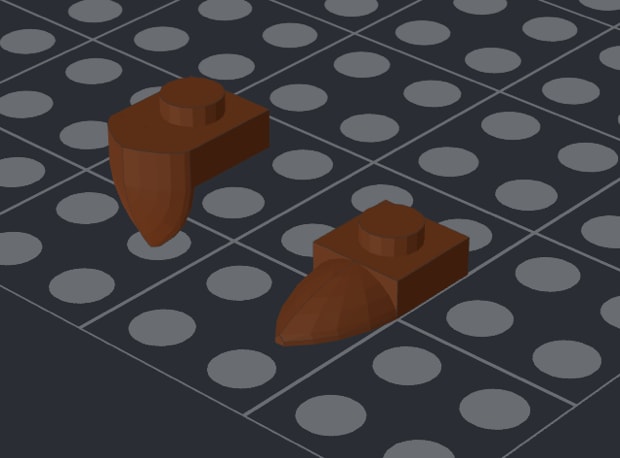
前者の方が周りのポッチ方向と同じなので簡単に接続ができるのですが、これでは表面にポッチが露出してしまい、なんか嫌です。そこで後者を使うことにしました。爪の向きを上にしたいので、ポッチを反転させます。したがって、次の写真のようになります。矢印の方向がポッチの向きになります。
ポッチの幅は2.5プレートなので、写真のように微妙にずらしながらでないとぴったりはまりません。
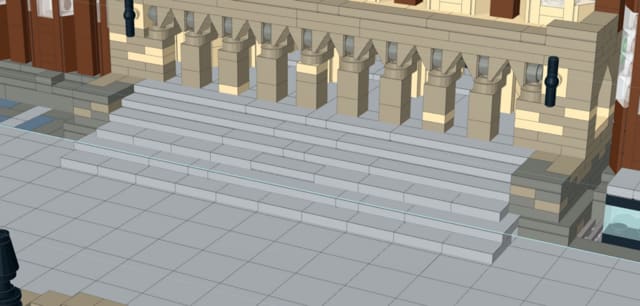
2. 玄関
横向きポッチのタイル表面にぴったりつける都合上、玄関全体は土台ポッチ平面から前後方向に半プレート分だけずれています。

このせいで階段を含む玄関部分は土台とはくっつけないことにしました。玄関部分は大半が上向きポッチなので、見たまんまの設計になっています。とはいえ、階段部分は土台と接続できない以上、ちょっとした工夫が必要です。
階段部分はタイル状にしたいのですが、普通のタイルでは下側しか接続できません。しかし下側はもう土台であり、これも上述の理由で接続できません。そこで、plate modifiedの以下のようなパーツを使いました。

しかし、このパーツが2幅限定であるにもかかわらず、玄関の階段は奇数幅です。したがって、これをそのまま並べるわけにもいきません。

そこで、階段の下側部分のみ玄関ポッチ平面から左右方向に半ポッチずらしました。これで下側部分のみ偶数幅になるので、先ほどのパーツを並べることができました。
最後に、玄関部分は土台と接続しないので、中間土台と本体中央のみに接続します。本体との接続はうまいこと半プレート分だけずらして接続し、中間土台との接続は強度面からaxleを使いました。

長い道程でしたが、これにて玄関部分は完成です。基本的に上向きポッチの設計なので、組み立てやすかったです。
次に一番複雑な本体の中身の設計について紹介します。
1. 本体右(左も同じ)
せきしょーさんがラフで示してくれた表面の設計では、本体右の全体幅は
(1ポッチ+3プレート+1ポッチ+3プレート)×4
でした。
2ポッチ=5プレートの法則より、ポッチ換算にすると、17.6ポッチになります。これでは普通に上ポッチで接続することは不可能です。
では横ポッチの接続ではどうでしょうか。2ポッチ=5プレートの法則より、17.6ポッチは44プレートです。素晴らしい!整数です!こんな経緯で横ポッチ接続を採用しました。
しかし、単純に44プレート分重ねて表面とぺったんこするだけでは、強度を保つという中身の設計が担うべき責務をまっとうできません。加えて厄介なのが、畑の畝みたいな表面の形状です。上述した式を見てもらえればわかるように、間にポッチが、しかも1ポッチのみで存在しているのです。つまり下のようになります。
プレート1枚分の厚みをフとおき、半プレート分の厚みをフとおきます。
フフフが1ポッチ、フフが横向きポチスロ、フが横向きプレートです。
フフフフフフフフフフフ ←単純にプレートを重ねただけ(しかも厚さ11...)
フフフフフフフフフフフフ ←せきしょーさんが設計した高度な表面デザイン
なんか途中で半プレートずれているのがお分かりいただけるでしょうか。
中身の設計ではこのずれを調整しつつ、強度も保つようにしなければなりません。

まずは上の完成図をご覧ください。赤の矢印が全体のポッチ方向です。横向きになってますね。しかし、青の部分や緑の部分は上向きポッチになっています。これは間にある上向きポッチに対応するための設計です。これの奥(表面)には畝の頂点部分があります。せきしょーさんの解説にもあったように、表面の畝部分には側面ポッチのあるブロックが積み重なっているので、うまいことそれらのブロックの間にプレートを挟むことで、後方から強度面で援護しているというわけです。特に青の部分の茶色いプレートはそのまま表面まで出ているのでわかりやすいと思います。
ちなみに、所々にあるテクニックブロックは、中間土台とペグ接続するためのものです。中間土台は上向きポッチなため、横向き=上向き変換の都合上、テクニックブロックの位置は不規則な位置にきてしまいます。これをうまいことはめるのも苦労しました。
上の写真は青の部分を拡大したものです。矢印がポッチの向きになります。先ほど説明した半プレートのずれを埋めるために、ブラケットを挟み込んで対応しています。ブラケットの薄い部分は半プレートになっているからです。このブラケットも位置をミスると接続できないので注意しました。

次の写真は緑の部分を拡大したものです。ここでも半プレートのずれを埋めるためにブラケットが使われていますが、それに加えてヘッドライトも使っています。ヘッドライトの側面ポッチ方向の厚みは2プレートなので、へっこんだ厚みがちょうど半プレートになるからです。
2. 本体中央

基本的なことは本体右と変わらないです。上向きポッチと横向きポッチが混在しているので、横向きポッチを基軸にしつつ、上向きポッチの箇所は半プレートを埋めながら接続していきます。上向きポッチの箇所で所々にタンのプレートがありますが、これらは表面の畝の部分まで出ており、プレートとプレートの間に、側面ポッチのあるブロックを挟み込んで強度を保っています。本体右と違うのは、本体中央は左右対称でなければならないので、ポッチの向きが中央から外側に向かっているのがわかります。

上の写真はオレンジの部分を拡大したものです。上向きポッチの表面の畝部分を支えるために、所々上向きポッチを作っていることがわかると思います。横向きポッチの中に上向きポッチを混ぜると半プレートのずれが生じるので、ブラケットやヘッドライトでうまいこと調整しています。特に中央部分は側面ポッチが左右両方に向くように、順ブラケットと逆ブラケットでブロックを挟み込みました。こうすることで、側面ポッチの高さが同じになって都合が良いのです。
まとめると、
横向きポッチの方がキリがよくて都合がよかったのに、所々に上向きポッチを用意する必要があって半プレートを作り出さなければならず、予想以上に複雑な設計になった。
ということです。
ポッチの向きが不規則に変わる設計なので、どのパーツがどういう向きで接続しているのか直感的にわかりづらく、自分で設計したにもかかわらず組み立てには苦労しました。
完成品は表面のみしか見ることができません。しかし、裏に隠れて表の美しさを支えている摩訶不思議な設計があるということを知っていただければ、裏方の設計者としては嬉しいかぎりです。
…
さくらもちくんの解説は以上になります。最後に僕の方から、そもそもなぜこのようなスケールにしたのかといったことをお伝えしたいと思います。
今回の作品は、横幅を64ポッチ以内にしたいという大きな制約条件がありました。畝の数は全部で4 + 5 + 4 = 13個であり、畝と柱を合わせた一つの繰り返し単位の横幅は、64 / 13 = 4.92ポッチ以内に治めないといけません。この時点で畝の特徴的な形を再現するのにウェッジプレートやコーナーブロックといった、普通に上ポッチ接続ができ、角がかけているパーツが使えなくなります。これらのパーツを使ってしまうと、少なくとも4ポッチは必要になるからです。また、これらのパーツには透明なものがなく、窓の表現をすることができません。そこで今回はスロープを使って畝の形を再現することにしました。(正直なところ他に表現の仕方が思いつかなかったのです...)

スロープを使い繰り返し単位(柱と畝)を作ったところ、ちょうど11プレートの厚み(1ポッチ+3プレート+1ポッチ+3プレートなので)になり横ポッチ接続ができました。また、本体中央の横幅が、繰り返し単位5個(11プレート × 5 = 55 プレート) と柱一本(1ポッチ = 2.5プレート)で57.5プレート = 23ポッチとなり、両端の柱と中央の畝のポッチが上を向いている部分が上ポッチ接続ができる間隔になりました。加えて、両側の茶色い部分が、繰り返し単位4個(11プレート × 44 = 44 プレート)で1プレート足せば45プレート = 18ポッチと、ちょうどポッチ単位になりました。こんな具合に、図書館全体がポッチ単位になり、頑張れば作れそうだと思ったのでこのスケールを採用しました。(まあ、思った以上に見通しが甘かったのですが。)
…
総合図書館の制作記は以上になります。後半は細かい話になってしまいましたが、設計者の苦労や、どのように考えて作品を作り上げたのかといったことを感じていただけたら幸いです。
それでは。
今回は、東京大学の総合図書館を制作したので、その紹介記事になります。後半は比較的細かい部分の話が多いので、なんだか色々工夫しているんだなーと思っていただければ幸いです。
今回は、僕が作品の統括と土台などの設計を担当し、さくらもちくんが総合図書館の設計を担当しました。
…
さて、今回作製しました総合図書館ですが実際の見た目はこんな感じです。
(僕のスマホの画角では全体を収めるのは難しかったので見切れていますがご容赦いただけたらと思います。)
画像を見て気がつく方もいると思いますが、建物の見た目は、同じ構造の繰り返しになっています。繰り返し構造のある作品は、それをうまく利用することで設計や組み立ての作業量が減るため作りやすいです。今回も繰り返し構造が多いので作りやすいのかなと思ったのですが、物事はそう簡単に思い通りに行かないですね。かなり苦労しました...
以下、それぞれの部分について紹介していきたいと思います。
まずは土台から。
プレートで下地を作り
ブロックを積んで、
プレートとタイルを貼って完成です。
中央のくぼみは図書館前広場にある噴水を設置するために開けてあります。また、噴水周りのベンチも再現しました。
続いては噴水です。
こんな感じで同じものを4つ作り、
くっつけたら、
完成です。
もう少し細かいところまで表現できれば良かったのですが、この大きさではこれが限界でした。
最後に土台に噴水をはめ込んで、公園前広場の完成です。
一応噴水の底の模様などもタイルの色を変えることで表現してみたのですが、あまり見えないですね。普段のレゴ部の大型作品では、土台が四角いものが多いですが、今回は広場が単調な雰囲気になってしまうのを避けるために、土台を扇型にしてみました。また、タイルで石張の舗装を、プレートでコンクリートの表現をしてみました。
今度は図書館側の土台です。
こちらも先ほどと同様に、プレートとブロックを積んで、
プレートとタイルを貼って完成です。
さて、いよいよメインの総合図書館の組み立てです。設計や組み立てにかなり苦労したのですが、細かい話なのでまずは完成していく様子を。
繰り返し構造を意識しながら組んでいきます。
プレートにスロープをつけて、
それを固定する部分を作り、
先ほどのパーツで挟み込むように固定すれば、繰り返し部分の完成です。
透明のパーツの高さが、正面と側面で0.5プレートずれていますが、まあそこまで気にならないですし、これを解消しようとすると、かえって全体のバランスが悪くなったり、強度が弱くなったりしてしまうので仕方ないでしょう。
これを4つ組んで、間の柱を組んで接続すれば、
向かって左側の部分の完成です。
裏側はこんな感じです。
正面のシンプルな見た目からは想像ができないほど入り組んでいます。なぜこのような構造になったかとかはまた後ほど設計者のさくらもちくんに語ってもらいたいと思います。
反対側はこれと同じものを左右反転させて組むだけなので割愛します。
最後に正面部分です。これも基本的には先ほどと同様の組み方をしていきますが、繰り返しの数が違っているので、見た目は変わりませんが裏側はそれなりに変わってきます。
先ほどと同様の構造を色を変えて組み、
これを5個組み合わせれば、
正面部分の完成です。
横から見るとこんな感じです。
裏側はこんな感じです。
入り組んでいるので組むのがかなり大変でした。
最後に玄関部分です。ここは制作の過程を撮影するのを忘れてしまったので、完成した状態を。
スロープと呼ばれる三角のパーツを使って入り口のアーチを再現しています。
さて、全てのパーツが揃ったのでこれらを組み合わせていきます。
それぞれの部分を組み合わせて、
裏側のテクニックブロックにペグを挿し、
上の画像のような建物を支える土台とくっつけ、土台に乗せれば、
完成です。
それでは図書館の構造についての解説を、設計してくれた、さくらもちくんにしてもらおうと思います。
…
図書館本体の設計を担当したさくらもちです。本体の設計と言っても、せきしょーさんのラフの段階で表面のデザインはほとんど完成していたため、私がやったことは、表面のディティールアップと作品としてきちんと接続されるように中身を設計することです。
まずは本体全体のモジュール分割を考えました。共同作業ではよくやることなのですが、単に1個体として設計するのではなく、モジュールごとに設計し、最後にそれらのモジュールをがっちゃんこするやり方です。
今回設定したモジュール単位は以下の通りです。
・本体中央
・本体左
・本体右
・玄関
・中間土台
モジュール同士の接続は以下のような形をとります。強度面から接続にはペグを使います。ただし玄関と本体中央の接続には不本意ながら一部ポッチ接続を採用しました。
次に表面のディティールアップを紹介します。
1. 爪の利用
このサイズの爪には、ポッチの横にあるタイプとポッチから下に伸びているタイプがあります。
前者の方が周りのポッチ方向と同じなので簡単に接続ができるのですが、これでは表面にポッチが露出してしまい、なんか嫌です。そこで後者を使うことにしました。爪の向きを上にしたいので、ポッチを反転させます。したがって、次の写真のようになります。矢印の方向がポッチの向きになります。
ポッチの幅は2.5プレートなので、写真のように微妙にずらしながらでないとぴったりはまりません。
2. 玄関
横向きポッチのタイル表面にぴったりつける都合上、玄関全体は土台ポッチ平面から前後方向に半プレート分だけずれています。
このせいで階段を含む玄関部分は土台とはくっつけないことにしました。玄関部分は大半が上向きポッチなので、見たまんまの設計になっています。とはいえ、階段部分は土台と接続できない以上、ちょっとした工夫が必要です。
階段部分はタイル状にしたいのですが、普通のタイルでは下側しか接続できません。しかし下側はもう土台であり、これも上述の理由で接続できません。そこで、plate modifiedの以下のようなパーツを使いました。
しかし、このパーツが2幅限定であるにもかかわらず、玄関の階段は奇数幅です。したがって、これをそのまま並べるわけにもいきません。
そこで、階段の下側部分のみ玄関ポッチ平面から左右方向に半ポッチずらしました。これで下側部分のみ偶数幅になるので、先ほどのパーツを並べることができました。
最後に、玄関部分は土台と接続しないので、中間土台と本体中央のみに接続します。本体との接続はうまいこと半プレート分だけずらして接続し、中間土台との接続は強度面からaxleを使いました。
長い道程でしたが、これにて玄関部分は完成です。基本的に上向きポッチの設計なので、組み立てやすかったです。
次に一番複雑な本体の中身の設計について紹介します。
1. 本体右(左も同じ)
せきしょーさんがラフで示してくれた表面の設計では、本体右の全体幅は
(1ポッチ+3プレート+1ポッチ+3プレート)×4
でした。
2ポッチ=5プレートの法則より、ポッチ換算にすると、17.6ポッチになります。これでは普通に上ポッチで接続することは不可能です。
では横ポッチの接続ではどうでしょうか。2ポッチ=5プレートの法則より、17.6ポッチは44プレートです。素晴らしい!整数です!こんな経緯で横ポッチ接続を採用しました。
しかし、単純に44プレート分重ねて表面とぺったんこするだけでは、強度を保つという中身の設計が担うべき責務をまっとうできません。加えて厄介なのが、畑の畝みたいな表面の形状です。上述した式を見てもらえればわかるように、間にポッチが、しかも1ポッチのみで存在しているのです。つまり下のようになります。
プレート1枚分の厚みをフとおき、半プレート分の厚みをフとおきます。
フフフが1ポッチ、フフが横向きポチスロ、フが横向きプレートです。
フフフフフフフフフフフ ←単純にプレートを重ねただけ(しかも厚さ11...)
フフフフフフフフフフフフ ←せきしょーさんが設計した高度な表面デザイン
なんか途中で半プレートずれているのがお分かりいただけるでしょうか。
中身の設計ではこのずれを調整しつつ、強度も保つようにしなければなりません。
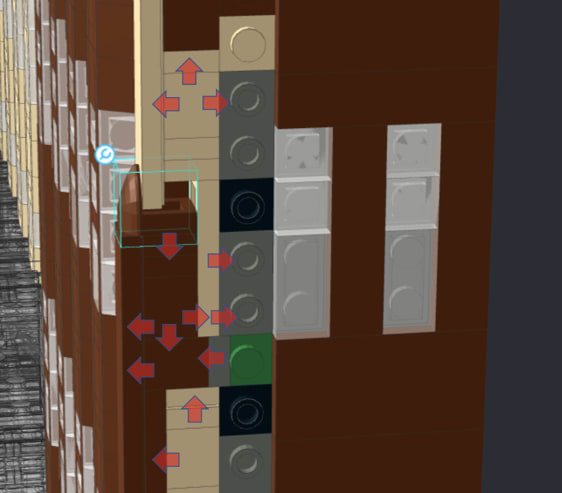
まずは上の完成図をご覧ください。赤の矢印が全体のポッチ方向です。横向きになってますね。しかし、青の部分や緑の部分は上向きポッチになっています。これは間にある上向きポッチに対応するための設計です。これの奥(表面)には畝の頂点部分があります。せきしょーさんの解説にもあったように、表面の畝部分には側面ポッチのあるブロックが積み重なっているので、うまいことそれらのブロックの間にプレートを挟むことで、後方から強度面で援護しているというわけです。特に青の部分の茶色いプレートはそのまま表面まで出ているのでわかりやすいと思います。
ちなみに、所々にあるテクニックブロックは、中間土台とペグ接続するためのものです。中間土台は上向きポッチなため、横向き=上向き変換の都合上、テクニックブロックの位置は不規則な位置にきてしまいます。これをうまいことはめるのも苦労しました。
上の写真は青の部分を拡大したものです。矢印がポッチの向きになります。先ほど説明した半プレートのずれを埋めるために、ブラケットを挟み込んで対応しています。ブラケットの薄い部分は半プレートになっているからです。このブラケットも位置をミスると接続できないので注意しました。
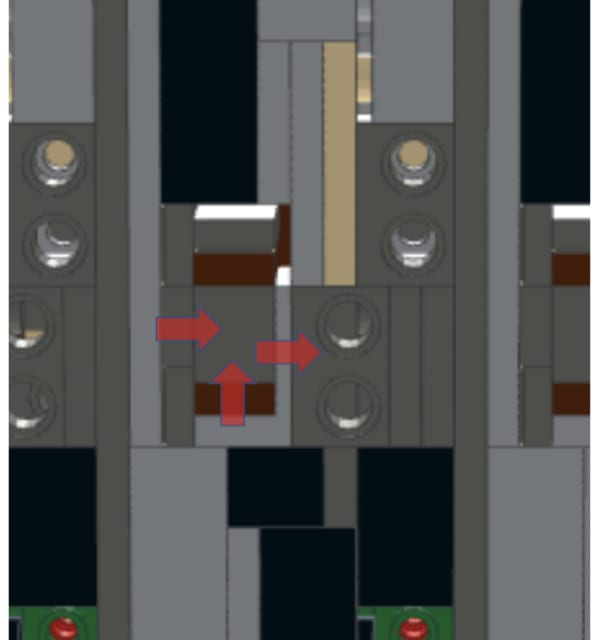
次の写真は緑の部分を拡大したものです。ここでも半プレートのずれを埋めるためにブラケットが使われていますが、それに加えてヘッドライトも使っています。ヘッドライトの側面ポッチ方向の厚みは2プレートなので、へっこんだ厚みがちょうど半プレートになるからです。
2. 本体中央
基本的なことは本体右と変わらないです。上向きポッチと横向きポッチが混在しているので、横向きポッチを基軸にしつつ、上向きポッチの箇所は半プレートを埋めながら接続していきます。上向きポッチの箇所で所々にタンのプレートがありますが、これらは表面の畝の部分まで出ており、プレートとプレートの間に、側面ポッチのあるブロックを挟み込んで強度を保っています。本体右と違うのは、本体中央は左右対称でなければならないので、ポッチの向きが中央から外側に向かっているのがわかります。
上の写真はオレンジの部分を拡大したものです。上向きポッチの表面の畝部分を支えるために、所々上向きポッチを作っていることがわかると思います。横向きポッチの中に上向きポッチを混ぜると半プレートのずれが生じるので、ブラケットやヘッドライトでうまいこと調整しています。特に中央部分は側面ポッチが左右両方に向くように、順ブラケットと逆ブラケットでブロックを挟み込みました。こうすることで、側面ポッチの高さが同じになって都合が良いのです。
まとめると、
横向きポッチの方がキリがよくて都合がよかったのに、所々に上向きポッチを用意する必要があって半プレートを作り出さなければならず、予想以上に複雑な設計になった。
ということです。
ポッチの向きが不規則に変わる設計なので、どのパーツがどういう向きで接続しているのか直感的にわかりづらく、自分で設計したにもかかわらず組み立てには苦労しました。
完成品は表面のみしか見ることができません。しかし、裏に隠れて表の美しさを支えている摩訶不思議な設計があるということを知っていただければ、裏方の設計者としては嬉しいかぎりです。
…
さくらもちくんの解説は以上になります。最後に僕の方から、そもそもなぜこのようなスケールにしたのかといったことをお伝えしたいと思います。
今回の作品は、横幅を64ポッチ以内にしたいという大きな制約条件がありました。畝の数は全部で4 + 5 + 4 = 13個であり、畝と柱を合わせた一つの繰り返し単位の横幅は、64 / 13 = 4.92ポッチ以内に治めないといけません。この時点で畝の特徴的な形を再現するのにウェッジプレートやコーナーブロックといった、普通に上ポッチ接続ができ、角がかけているパーツが使えなくなります。これらのパーツを使ってしまうと、少なくとも4ポッチは必要になるからです。また、これらのパーツには透明なものがなく、窓の表現をすることができません。そこで今回はスロープを使って畝の形を再現することにしました。(正直なところ他に表現の仕方が思いつかなかったのです...)
スロープを使い繰り返し単位(柱と畝)を作ったところ、ちょうど11プレートの厚み(1ポッチ+3プレート+1ポッチ+3プレートなので)になり横ポッチ接続ができました。また、本体中央の横幅が、繰り返し単位5個(11プレート × 5 = 55 プレート) と柱一本(1ポッチ = 2.5プレート)で57.5プレート = 23ポッチとなり、両端の柱と中央の畝のポッチが上を向いている部分が上ポッチ接続ができる間隔になりました。加えて、両側の茶色い部分が、繰り返し単位4個(11プレート × 44 = 44 プレート)で1プレート足せば45プレート = 18ポッチと、ちょうどポッチ単位になりました。こんな具合に、図書館全体がポッチ単位になり、頑張れば作れそうだと思ったのでこのスケールを採用しました。(まあ、思った以上に見通しが甘かったのですが。)
…
総合図書館の制作記は以上になります。後半は細かい話になってしまいましたが、設計者の苦労や、どのように考えて作品を作り上げたのかといったことを感じていただけたら幸いです。
それでは。














