









GJ436の視線速度を測定するとGJ436bが恒星の赤道に対して垂直の公転軌道を持っていることが分かった。以下、機械翻訳。
VLT /エスプレッソで見られる暖かい海王星GJ436bの極軌道
2022年3月11日に提出
概要
GJ 436bは、外側の仲間によって引き起こされた遅い移動を受けた暖かいネプチューンのプロトタイプである可能性があります。そのようなシステムの軌道アーキテクチャの正確な決定は、それらの動的を制約するために重要です
歴史と太陽系外惑星集団における遅延移動の役割の評価。この目的のために、私たちは分析しました
3つの異なる手法を使用した2つのトランジット(最近ESPRESSOで観測された)でのGJ 436 bのロシター-マクラフリン(RM)信号。視線速度(RV)測定で達成された高レベルの精度により、
M矮星ホストの回転が遅いにもかかわらず、ケプラーの軌道からの偏差(vsini⊛= 272.0`+40.0´-34.0 m/s)、および
空に投影された傾斜角を測定します(λ= 102.5`+17.2´-18.5度)。恒星のRVフィールドを可能にするリローデッドRMテクニック
分析対象のトランジットコードに沿って、λ=107.5`+23.6´-19.3度およびvsini⊛=292.9`+41.9´-49.9 m/sが得られます。
RM革命すべての惑星掩蔽領域からのスペクトルプロファイルを一緒に適合させることを可能にする技術は、λ=114.1`+22.8´-17.8度およびvsini˚=300.5`+45.9´-57.0 m/sをもたらします。
これらの3つの手法の間で一貫した結果が得られ、HARPS / HARPS-Nデータ、GJ 436bの極軌道を確認し、その起源が古在にあるという仮説を支持する
移行。 ESPRESSO、HARPS、およびHARPS-Nデータセットの共同RM革命分析の結果(λ=113.5`+23.3´-17.3度; vsini˚=293.5`+43.7´-52.2 m/s)修正された恒星傾斜角と組み合わせる(i <= 35.7`+5.9´-7.6度または144.2`+7.6´-5.9度) リード3D傾斜角Ψを103.2`+12.8´-11.5度に制限します。
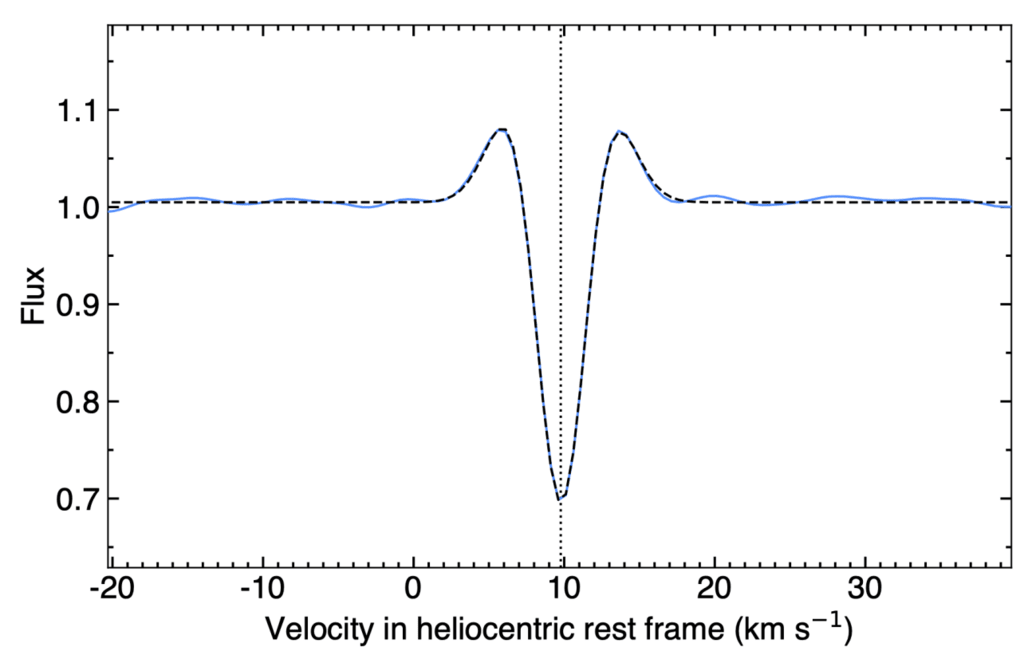
図1.訪問1(青いプロファイル)でのGJ436のマスターアウトCCFDIとその最適なダブルガウスモデル(黒い破線のプロファイル)。
垂直の点線は、測定された全身速度を示します。

図2.上:訪問1(オレンジ)および2(青)で測定されたRV残差でGJ436bによって誘発されたRM異常。 黒い点は、ビンサイズが2.5のRVデータのビニングを表します。
複合トランジット。 赤い線は、への古典的な適合を示しています
異常、灰色の領域で示される関連する不確実性。
垂直の破線は、1番目と4番目のトランジットコンタクトを示します。 下:全体的な分散を示すRV残差65cm/s。

図3.訪問1(上のパネル)と2(下のパネル)でのGJ436bの通過中のCCFintrのマップ。 左のパネルは測定値を示しています
プロファイル。 惑星掩蔽地域からの恒星線のコアは、サイドローブが見える明るい縞としてはっきりと見えます
暗い縞として両側。 中央のパネルは、RMRevolutionsの最適なプロファイルを示しています。 右のパネルは、測定された間の残差を示しています
および理論的プロファイル。 トランジットの連絡先は緑色の破線で示されています。 値はフラックスの関数として色分けされ、プロットされます
スターレストフレーム(横軸)および軌道位相(縦軸)のRVの関数として。 緑の実線は恒星の表面を示しています
RMRevolutionsのRVモデルが最適です。

図4.によって掩蔽された恒星表面領域の特性
ESPRESSOのGJ436bは、1(青)と2(赤)を訪問します。
個々の露出に適合します。 縦棒は、関連する1σの最高密度間隔を示します。 横棒は
各露出の期間。 実線は最高のものから導き出されます
RMレボリューションはCCFintrマップ(コントラストとFWHM)に適合します
各訪問に固有であり、それに応じて色付けされています)。 点線
トップパネルの線は、表面に最もフィットするリローデッドRMです。
RVシリーズ、RMレボリューションズフィットのモデルとほぼ同じ。 縦の破線はトランジットの連絡先です。
図9.最適な軌道アーキテクチャのための空の平面でのGJ436の投影、恒星のスピン(北極から伸びる黒い矢印として表示)は
地球を指しています。 南極は空として表示されます
ディスク。 恒星の赤道は、黒の実線(破線)で表されます。
目に見える(隠された)恒星半球の線。 恒星円盤
表面のRVフィールドの関数として色付けされます。 通常のGJ436bの軌道面は緑色の矢印で示されています。
太い緑色の実線の曲線は、最適な軌道軌道を表しています。それを囲む細い線は、軌道のために得られた軌道を示しています
傾斜角、半主軸、および空に投影された傾斜角の値 確率分布から1σ以内でランダムに描画されます。
星、惑星(黒い円盤)、および軌道は一定の比率になっています。
6.結論
従来のリローデッドRM、およびRMレボリューション分析
ESPRESSOの収量で観測されたGJ436bの2つのトランジットの結果
空に投影された赤道傾斜角λと恒星についても同様の結果
回転速度vsini˚、これも
Bourrierらによって得られた値。 (2018b)(表3)。
これは、これらの後者の結論を明確に確認します
GJ 436bは、ゆっくりと回転するホストの周りの極軌道上にあると著者は述べています。
3つの分析手法により、
掩蔽されたときに同等の精度でλとvsini˚
恒星線は各露出で検出可能であり、一定です
トランジットコードを横切って、ソリッドボディの回転が支配的です
GJ 436bの場合のように、ドップラーシフト。
古典的なRMによって提供されるより小さな不確実性
GJ 436bの適合は、基礎となる仮定から生じる可能性があります
一定の恒星線プロファイルの
他のテクニックと比較したフィット感。ただし、この仮定は、の独立した分析によってのみ検証されます。
ReloadedRMおよびRMRevolutionsテクニックのローカルラインプロファイル。一般的なケースでは、従来のRMアプローチは使用しないため、注意して使用する必要があります。
掩蔽された恒星線を抽出して研究できるようにし、これらの線が変化すると、結果に偏りが生じやすくなります。
リロードされたRM間の同等の精度
GJ436bのRMRevolutionsフィットは、ほぼすべての曝露における掩蔽された恒星線の検出可能性。実際、リロードされたRM手法は、
によって惑星掩蔽地域のRVを導出する可能性
個々の露出で掩蔽された恒星線をフィッティングします。これ
したがって、惑星が小さくなる/ホストになると、テクニックは精度を失います
星が暗くなり、検出できる線が少なくなります。
それが完全に失敗するポイント。これは、スーパーアースHD3167b、その信号は検出しかできませんでした
RM Revolutionsテクニックを介して(Bourrieretal。2021)。
クラシック、リローデッドRM、およびRMレボリューション
技術は理想的な場合に同等の結果をもたらし、後者は
RMトランジットデータセットを完全に活用し、評価するには
線の形状に起因する可能性のあるバイアスの存在を回避します
バリエーション、および私たちは、忘却を測定するためにその使用をお勧めします
あらゆる種類の惑星系から。
VLT /エスプレッソで見られる暖かい海王星GJ436bの極軌道
2022年3月11日に提出
概要
GJ 436bは、外側の仲間によって引き起こされた遅い移動を受けた暖かいネプチューンのプロトタイプである可能性があります。そのようなシステムの軌道アーキテクチャの正確な決定は、それらの動的を制約するために重要です
歴史と太陽系外惑星集団における遅延移動の役割の評価。この目的のために、私たちは分析しました
3つの異なる手法を使用した2つのトランジット(最近ESPRESSOで観測された)でのGJ 436 bのロシター-マクラフリン(RM)信号。視線速度(RV)測定で達成された高レベルの精度により、
M矮星ホストの回転が遅いにもかかわらず、ケプラーの軌道からの偏差(vsini⊛= 272.0`+40.0´-34.0 m/s)、および
空に投影された傾斜角を測定します(λ= 102.5`+17.2´-18.5度)。恒星のRVフィールドを可能にするリローデッドRMテクニック
分析対象のトランジットコードに沿って、λ=107.5`+23.6´-19.3度およびvsini⊛=292.9`+41.9´-49.9 m/sが得られます。
RM革命すべての惑星掩蔽領域からのスペクトルプロファイルを一緒に適合させることを可能にする技術は、λ=114.1`+22.8´-17.8度およびvsini˚=300.5`+45.9´-57.0 m/sをもたらします。
これらの3つの手法の間で一貫した結果が得られ、HARPS / HARPS-Nデータ、GJ 436bの極軌道を確認し、その起源が古在にあるという仮説を支持する
移行。 ESPRESSO、HARPS、およびHARPS-Nデータセットの共同RM革命分析の結果(λ=113.5`+23.3´-17.3度; vsini˚=293.5`+43.7´-52.2 m/s)修正された恒星傾斜角と組み合わせる(i <= 35.7`+5.9´-7.6度または144.2`+7.6´-5.9度) リード3D傾斜角Ψを103.2`+12.8´-11.5度に制限します。
図1.訪問1(青いプロファイル)でのGJ436のマスターアウトCCFDIとその最適なダブルガウスモデル(黒い破線のプロファイル)。
垂直の点線は、測定された全身速度を示します。
図2.上:訪問1(オレンジ)および2(青)で測定されたRV残差でGJ436bによって誘発されたRM異常。 黒い点は、ビンサイズが2.5のRVデータのビニングを表します。
複合トランジット。 赤い線は、への古典的な適合を示しています
異常、灰色の領域で示される関連する不確実性。
垂直の破線は、1番目と4番目のトランジットコンタクトを示します。 下:全体的な分散を示すRV残差65cm/s。
図3.訪問1(上のパネル)と2(下のパネル)でのGJ436bの通過中のCCFintrのマップ。 左のパネルは測定値を示しています
プロファイル。 惑星掩蔽地域からの恒星線のコアは、サイドローブが見える明るい縞としてはっきりと見えます
暗い縞として両側。 中央のパネルは、RMRevolutionsの最適なプロファイルを示しています。 右のパネルは、測定された間の残差を示しています
および理論的プロファイル。 トランジットの連絡先は緑色の破線で示されています。 値はフラックスの関数として色分けされ、プロットされます
スターレストフレーム(横軸)および軌道位相(縦軸)のRVの関数として。 緑の実線は恒星の表面を示しています
RMRevolutionsのRVモデルが最適です。
図4.によって掩蔽された恒星表面領域の特性
ESPRESSOのGJ436bは、1(青)と2(赤)を訪問します。
個々の露出に適合します。 縦棒は、関連する1σの最高密度間隔を示します。 横棒は
各露出の期間。 実線は最高のものから導き出されます
RMレボリューションはCCFintrマップ(コントラストとFWHM)に適合します
各訪問に固有であり、それに応じて色付けされています)。 点線
トップパネルの線は、表面に最もフィットするリローデッドRMです。
RVシリーズ、RMレボリューションズフィットのモデルとほぼ同じ。 縦の破線はトランジットの連絡先です。
図9.最適な軌道アーキテクチャのための空の平面でのGJ436の投影、恒星のスピン(北極から伸びる黒い矢印として表示)は
地球を指しています。 南極は空として表示されます
ディスク。 恒星の赤道は、黒の実線(破線)で表されます。
目に見える(隠された)恒星半球の線。 恒星円盤
表面のRVフィールドの関数として色付けされます。 通常のGJ436bの軌道面は緑色の矢印で示されています。
太い緑色の実線の曲線は、最適な軌道軌道を表しています。それを囲む細い線は、軌道のために得られた軌道を示しています
傾斜角、半主軸、および空に投影された傾斜角の値 確率分布から1σ以内でランダムに描画されます。
星、惑星(黒い円盤)、および軌道は一定の比率になっています。
6.結論
従来のリローデッドRM、およびRMレボリューション分析
ESPRESSOの収量で観測されたGJ436bの2つのトランジットの結果
空に投影された赤道傾斜角λと恒星についても同様の結果
回転速度vsini˚、これも
Bourrierらによって得られた値。 (2018b)(表3)。
これは、これらの後者の結論を明確に確認します
GJ 436bは、ゆっくりと回転するホストの周りの極軌道上にあると著者は述べています。
3つの分析手法により、
掩蔽されたときに同等の精度でλとvsini˚
恒星線は各露出で検出可能であり、一定です
トランジットコードを横切って、ソリッドボディの回転が支配的です
GJ 436bの場合のように、ドップラーシフト。
古典的なRMによって提供されるより小さな不確実性
GJ 436bの適合は、基礎となる仮定から生じる可能性があります
一定の恒星線プロファイルの
他のテクニックと比較したフィット感。ただし、この仮定は、の独立した分析によってのみ検証されます。
ReloadedRMおよびRMRevolutionsテクニックのローカルラインプロファイル。一般的なケースでは、従来のRMアプローチは使用しないため、注意して使用する必要があります。
掩蔽された恒星線を抽出して研究できるようにし、これらの線が変化すると、結果に偏りが生じやすくなります。
リロードされたRM間の同等の精度
GJ436bのRMRevolutionsフィットは、ほぼすべての曝露における掩蔽された恒星線の検出可能性。実際、リロードされたRM手法は、
によって惑星掩蔽地域のRVを導出する可能性
個々の露出で掩蔽された恒星線をフィッティングします。これ
したがって、惑星が小さくなる/ホストになると、テクニックは精度を失います
星が暗くなり、検出できる線が少なくなります。
それが完全に失敗するポイント。これは、スーパーアースHD3167b、その信号は検出しかできませんでした
RM Revolutionsテクニックを介して(Bourrieretal。2021)。
クラシック、リローデッドRM、およびRMレボリューション
技術は理想的な場合に同等の結果をもたらし、後者は
RMトランジットデータセットを完全に活用し、評価するには
線の形状に起因する可能性のあるバイアスの存在を回避します
バリエーション、および私たちは、忘却を測定するためにその使用をお勧めします
あらゆる種類の惑星系から。










※コメント投稿者のブログIDはブログ作成者のみに通知されます