









太陽熱をメインのエネルギー源にした熱気球。3.2㎏のペイロードを高度19㎞まで持ち上げて7時間程度飛行が可能。以下、機械翻訳。
成層圏での数時間にわたる飛行中のヘリオトロープ ソーラー熱気球の性能特性
概要
ヘリオトロープは、パッシブ ソーラー熱気球で、成層圏下部で数時間にわたってほぼ水平飛行が可能です。これらの安価な飛行プラットフォームは、製造コストが低いため、高頻度で成層圏を感知できますが、その性能はまだ体系的に評価されていません。2021年 7月から 9月にかけて、29 機のヘリオトロープがオクラホマ州から打ち上げられ、気球ベースの音響地震学研究 (BASS) の一環として浮上高度を達成しました。キャンペーン全体を通じて、ヘリオトロープのエンベロープはすべてほぼ同じで、飛行ラインにわずかな変化が見られました。このキャンペーン中に収集された飛行データは、打ち上げ、上昇、浮上、下降中の典型的なヘリオトロープの飛行動作を特徴付けるための大規模なサンプルです。各飛行段階の特徴が明らかにされ、さまざまなパラメータへの依存性が定量化され、通常飛行と異常飛行について説明されています。 1 はじめに ヘリオトロープ (Bowman et al., 2020) は、ほぼ一定の高度で数時間にわたって科学的なペイロードを対流圏上部と成層圏下部に運ぶことができるパッシブソーラー熱気球です。0.31 ミルの高密度ポリエチレンシート (金物店では「ペインターズプラスチック」として一般的に販売されています) で作られた球状のエンベロープで構成されています。バルーンの内部は、花火グレードの浮遊木炭パウダーを使用して暗くされています。この暗くなった材料は太陽光を吸収し、内部の空気を加熱して、グラムからキログラム規模のペイロードを成層圏下部に打ち上げます。比較的低コストで建造が容易なため、ここ数年でその使用が急速に増加しています (例: Brissaud et al. 2021、Bowman
と Krishnamoorthy 2021、Schuler et al. 2022、Silber et al. 2023)。これらの研究のほとんどは、特定の対象に向けて打ち上げられたヘリオトロープのサンプル数が比較的少ないものでした。その結果、研究間の飛行力学の比較から得られる知見は、打ち上げ場所間の材料、建造手順、大気条件の違いにより、限られた価値しかありませんでした。しかし、2021 年の夏には、バルーンベースの音響地震学研究 (BASS) の一環として、合計 29 個のヘリオトロープがオクラホマ州から打ち上げられました。この論文では、ヘリオトロープの通常の飛行挙動を特定するために、飛行段階 (上昇、浮上、下降) を特徴付けています。これは、ヘリオトロープを利用するプロジェクトを計画する際の指針となるだけでなく、他の研究からの飛行ダイナミクスを比較するためのベースライン パフォーマンスを確立します。
2021 年の BASS 飛行キャンペーン中に使用されたヘリオトロープは、打ち上げ直後の図 1 に示されています。この図には、バルーン エンベロープ (バルーンの素材)、シュラウド (ヘリオトロープ開口部付近の強化領域)、およびパラシュートと 2 つの (上部と下部の) ペイロード (計器類を保持するパッケージ) を含む飛行ラインが示されています。一般的なヘリオトロープの飛行は、産業用フロア ドラム ファンなどの送風機を使用してエンベロープに空気を充填することから始まります。太陽光がバルーンを温めると、バルーンは最終的に浮力を持ち、飛行構成と大気の状態に応じて徐々に浮上高度まで上昇します。バルーンが浮上すると、ほぼ 1 日中水平飛行を維持します。日没の少し前にバルーンは地球に向かって降下し始め、ヘリオトロープとペイロードを回収できるようになります。
図 1. 打ち上げ直後のヘリオトロープ (フライト 16.2) の写真。エンベロープ、シュラウド、パラシュート、ペイロード (上部と下部) が確認できます。
ヘリオトロープの開発は 2012年に始まり、その後 3 年間にわたってさまざまな形状とサイズがテストされました。十分に文書化された最初の 1 日のヘリオトロープ飛行は 2016 年に行われました。この飛行では、現在の BASS キャンペーンと同様に、超低周波音 (つまり、人間の可聴周波数より低い 20 Hz 未満の音) を測定するためのマイクロ気圧計が搭載されました (Young ら、2018年)。準球形の気球エンベロープは、2017 年の別の飛行キャンペーンで初めてヘリオトロープと名付けられました (Bowman と Albert、2018 年)。ヘリオトロープの科学的用途のほとんどは、音波の記録と成層圏エアロゾルの現場測定に重点が置かれてきました。 BASS キャンペーンは、大気圏に伝播する音波を介して地震活動を検出できることを証明することを目的としていました。これは、金星の地震学を実施する手段として、金星の大気圏内の高高度にマイクロ気圧計を配置する可能性を評価することが目的の一部でした。金星での直接的な地震測定は、主に表面温度が約 460 °C、圧力が約 90 気圧 (例: Stofan 他 1993 年、Cutts 他 2015 年) であるためセンサーの性能が難しく、これまで行われてきませんでした。しかし、金星の中層大気 (高度 45 ~ 79km) はそれほど厳しくないため、現在利用可能なセンサーを使用できる可能性があります。したがって、2021 年の BASS 飛行キャンペーンの主な目的は、下層成層圏に浮かぶヘリオトロープを使用して自然地震の音響特性を特定することでした。この取り組みは地球に類似した実験として機能し、気球を使用して金星の地震活動の検出をシミュレートしました (Krishnamoorthy and Bowman 2023)。ただし、地震活動の研究は現在の研究の焦点ではありません。むしろ、この研究ではこれらの飛行を利用して、ヘリオトロープ飛行の各段階をさらに調査および特徴付け、飛行プラットフォームのパフォーマンスをよりよく理解します。原稿のセクション 2 では、エンベロープとリギング、飛行ラインと計器、飛行操作、飛行日の概要など、採用された方法について説明します。セクション 3 では、飛行の各段階 (打ち上げと上昇、浮上、下降と着陸) を特徴付けます。セクション 4 では、典型的な公称飛行、異常な飛行の観察について説明します。最後に、セクション 5 で結論を導き出します。
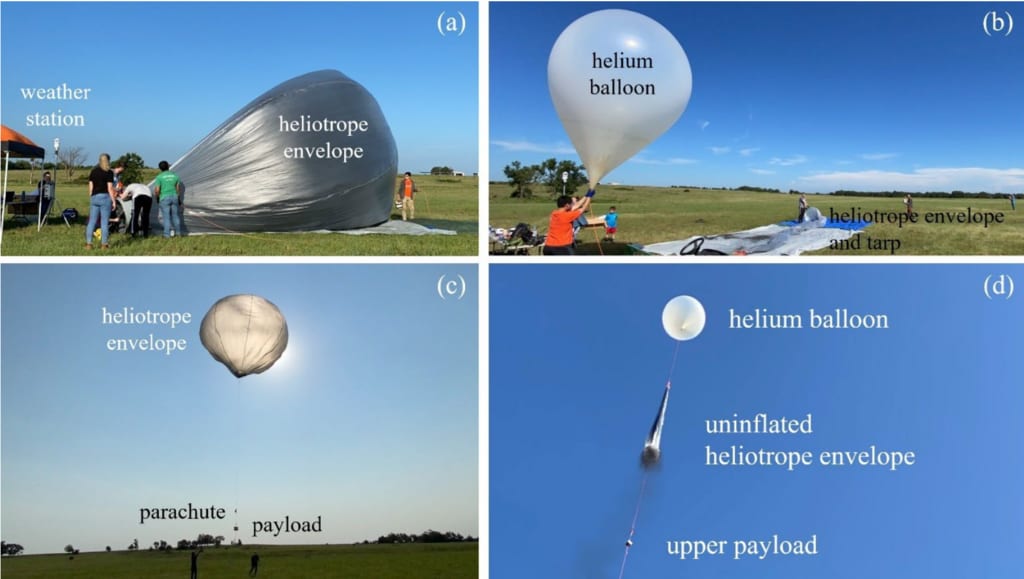
図 2. (a、c) 従来の地上打ち上げと (b、d) ヘリウム支援打ち上げの写真。(a、b) 打ち上げ直前、(c、d) エンベロープが空中に浮上した後。

図 3. 一般的な飛行 (フライト 4.2) における上部ペイロード IMU と APRS トラッカーからの高度データ。飛行段階 (上昇、浮遊、下降) を示しています。発射時と着陸時の高度は、水平の破線で示されています。IMU は APRS よりもサンプリング レートが高い (つまり、データ ポイントが非常に近いため太い線で表示されます) のですが、浮遊段階が終了する前に電力が失われます。段階の開始と終了、および日の出/日の入りを示す線も参考のために含まれています。

図 4. (a) 地上、(b) ヘリウム補助、(c) タイプ 1 (上空で破裂) ヘリウム補助、(d) タイプ 2 (下空で破裂) ヘリウム補助の打ち上げシーケンス。時間は、指定されたフライトの打ち上げ時間に対して測定されます。地上打ち上げは最も遅い上昇プロファイルを示しますが、ヘリウム補助打ち上げは、初期の上昇率が高く、同様のプロファイルを示します。ヘリウム補助打ち上げは、タイプ 1 (浮遊高度を超えるヘリウム バルーンの破裂) とタイプ 2 (浮遊高度を下回るヘリウム バルーンの破裂) に分けられます。
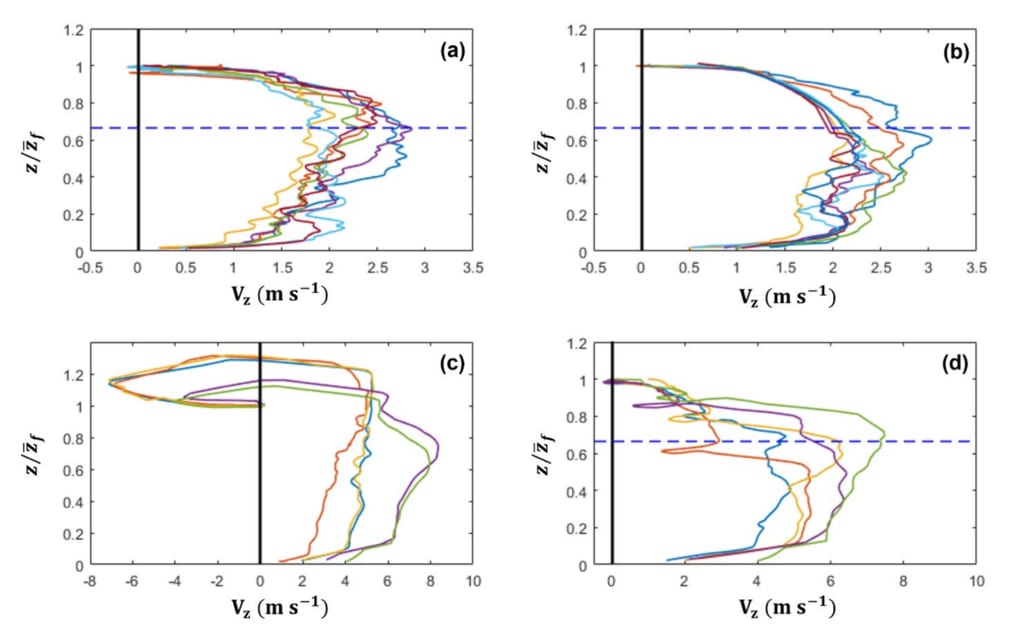
図 5. 平均フロート高度 (Z𝑓) で正規化した高度 (z) を、(a) 地上、(b) ヘリウム増強、(c) タイプ 1 (フロート上方バースト) ヘリウム補助、(d) タイプ 2 (フロート下方バースト) ヘリウム補助打ち上げの上昇中の垂直速度 (𝑉𝑉𝑧𝑧) に対してプロットしたもの。青い破線の水平線は、ヘリウム気球が気球をフロート高度より上に持ち上げる (c) を除き、フロート高度の 3 分の 2 を示しています。
4 考察
a. 公称飛行挙動
公称飛行挙動は、浮上しデータが正常に記録された 28 回のヘリオトロープ飛行 (地上打ち上げ 9 回、ヘリウム増強 8 回、ヘリウム補助 11 回) に基づいて決定されます。打ち上げ中の地上条件は、気温が 13 ~ 28 °C で、平均太陽放射照度は約 300 W m-2 でした。地上、ヘリウム増強、ヘリウム補助打ち上げの平均 (最大) 風速は、それぞれ 1.3 m s-1 (2.5 m s-1)、1.7 m s-1 (2.0 m s-1)、2.1 m s-1 (5.1 m s-1) でした。離陸時の平均垂直速度は、地上、ヘリウム増強、ヘリウム補助打ち上げでそれぞれ公称 0.5、1.2、4.4 m s-1 でした。上昇率は上昇し、浮上高度の約 3 分の 2 で最大に達しました。ヘリウム増強打ち上げは、最大上昇率に達する前は地上打ち上げに比べてわずかに高い上昇率を示しましたが、高高度では差はほとんどありませんでした。ヘリウム補助上昇は、ヘリウム気球の状態と充填量に左右されます。打ち上げから浮上までの平均時間は、打ち上げ方法に応じて 104 分 (ヘリウム補助タイプ 1、浮上上方破裂) から 223 分 (地上) の範囲でした。個々のヘリオトロープの平均浮上高度は 17.4 km から 22.2 km の範囲で、浮上段階の高度の平均標準偏差は 0.2 km でした。打ち上げ方法と平均浮上高度の間には明らかな依存関係はなく、すべての飛行の平均は 19.3 km でした。これは、ヘリウム補助打ち上げではエンベロープに系統的な損傷が発生せず、ヘリウム増強打ち上げではヘリウムが浮上する前にエンベロープから排出されたことを示しています。浮上高度の高次統計では、分布の裾が正規分布よりもわずかに重く、低高度に偏っていることが示されています。浮上段階の高度のスペクトログラムでは、すべての飛行で約 150 秒周期の有意なスペクトル コンテンツが生成されていることが示されました。ほとんどの飛行では、150 秒を超える周期で有意な非線形スペクトル コンテンツも示されました。降下は、ヘリオトロープの位置(緯度、経度、高度)で日没の平均 36 分前に始まりました。通常の飛行では、ヘリオトロープのエンベロープはシュラウド リングと飛行ラインに取り付けられたままでした。これらの 20 回の通常の降下の平均降下率は 2.8 m s-1 で、平均衝突速度は 2.2 m s-1 でした。降下開始から着陸までの平均時間は 91 ± 19 分で、地上への着陸の平均時間は日没後 55 分と名目上設定されています。通常の着陸以外の着陸(ハード ランディング)の場合、飛行ラインに設置されたパラシュートを使用して衝突速度を制御する必要があります。
b. 異常な飛行の観察
1) 再発射
通常、ヘリオトロープは、エンベロープが停止前に接触する際に引きずられるため、着陸時に損傷します。その結果、着陸したヘリオトロープは通常、大幅な修理を行わなければ飛行できなくなります。しかし、2021年のBASS飛行キャンペーンでは、2機のヘリオトロープが着陸し、その後再発射しました。フライト3.1は、従来の地上発射で、最初は午前8時35分頃(UTC-5)に発射され、比較的一定の上昇率で地上約458メートルまで上昇しました。その後、午前8時50分(UTC-5)に上昇が止まり、徐々に地上に下降しました。目撃者は、エンベロープに明らかな損傷の兆候がなく、10時41分(UTC-5)に再び空中に浮上するのを目撃しました。フライト3.1の残りの飛行は正常でした。浮上高度の標準偏差は比較的高かったものの(437メートル)、その日に発射されたもう1機の気球(フライト3.2)の浮上高度の標準偏差はより大きかった(452メートル)。 2 回目の再打ち上げ (フライト 15.3) は、通常の上昇、浮遊、下降、着陸を伴う増強打ち上げでした。翌朝、私たちのチームは土地所有者に連絡を取り、図 10 に示すように、ヘリオトロープがエンベロープと両方のペイロードを無傷のまま着陸したことを確認しました。しかし、その日の午後 2 時 59 分 (UTC-5)、上部ペイロード衛星トラッカーは動きを報告しましたが、下部ペイロード衛星トラッカーは報告しませんでした。私たちのチームは土地所有者に再度連絡を取り、午後 3 時 (UTC-5) 頃にヘリオトロープが空中に浮き上がり、下部ペイロードが外れ、その後気球が視界から消えたことを確認できました。 APRS トラッカーは 2 回目の飛行について報告せず、ペイロード バッテリーが消耗していたため、2 回目の飛行に関する情報はほとんどありません。2 日目に搭載された SPOT 衛星トラッカーを使用すると、気球は再発射時に最初は北に移動し、北東に少なくとも 5.7 km 移動した後、南に向きを変えたことが分かります。
エンベロープと上部ペイロードは南に 113 km 浮遊し、最終的にテキサス州のキャド国立草原に着陸しました。

図 10。(a) 目撃者の説明に基づくフライト 15.3 の最初の着陸のスケッチ (エンベロープと飛行経路)。衛星画像に重ねて表示 (Google)。(b) 上部ペイロードが 2 日目に SPOT 衛星トラッカーから報告された、ペイロードが動いていたか静止していたかを示すレポート (Google)。
2) 浮遊中の上方逸脱
以前の研究では、太陽風船が雷雨の上を通過したときに 1 km 以上の高度逸脱が発生したことが指摘されています。アルベドの急激な増加により加熱が増加し、その結果高度が上昇すると推測されました (Wheeler 他 2022)。 2021年のBASS飛行キャンペーン中、フライト3.2は、初期の比較的水平な浮遊高度から5時間以上にわたって高度が大きく(1 km以上)上昇しました。これが、この飛行中の現地の気象条件の調査のきっかけとなり、浮遊段階の高度が気象レーダーからの反射のスナップショットとともに図11にプロットされています。これは、ヘリオトロープの高度が嵐が形成される直前に上昇し始めたことを示しています。これは、対流の開始期間に相当します。14:50(UTC-5)に、ヘリオトロープは2つの嵐システムの上にあり、それらは急速に合体し、東に移動するこれらの嵐の裏側にヘリオトロープを押し込んだようです。15:40(UTC-5)に、NOAAは、残留流出と中規模対流渦から発生したかなりの雷雨風が、この嵐の領域内で対流を開始するのに役立ったと報告しました。ヘリオトロープが東に移動する嵐の西側になると、フロート高度は最初の 100 分間のフロート高度とほぼ同じ高さに戻りました。これは、大きな変動 (1 km 以上) が雷雨と関連しているという観察結果を強く裏付けています。注目すべきは、図 6b に示す小さな上昇変動も調査されており、これはフロート段階中にヘリオトロープ領域で発生したいくつかの嵐を伴う小さな嵐の上空であったことです。
3) ハード ランディング 8 回のハード ランディングの根本的な原因は、ヘリオトロープ エンベロープがフライト ラインから外れたことでした。回収されたフライト ラインに基づくと、故障のメカニズムは、ヘリオトロープの口のシュラウド リングからエンベロープのプラスチックが引き裂かれたことでした。回収されたエンベロープとフライト ラインの損傷に関連する不確実性を考慮すると、この故障の詳細な分析を行うことは困難です。ただし、APRS トラッカーから記録された降下率の変化から、故障の高度を名目上推定できます。興味深い観察結果は、すべての故障が対流圏界面の前または近くで発生しているように見えることです。これは、APRS トラッカーから報告された温度測定値から名目上推定されました。乱気流の最大値は対流圏界面付近で発生します (例: Söder 他 2021)。これは、エンベロープが対流圏界面を通過しても無傷のままであれば、名目上の着陸になる可能性が高いことを示唆しています。

図 11。(上) 浮遊段階におけるフライト 3.2 高度の時間トレース。気象レーダー画像に対応する時間がマークされています。破線は、浮遊の最初の 100 分間の平均浮遊高度です。
(下) フライト 3.2 中の (a) 12:45、(b) 14:00、(c) 14:50、(d) 15:15、(e) 15:40、(f) 16:05、(g)
16:30、(h) 16:55 (UTC-5) の気象レーダー反射率。黄色で軌跡がトレースされ、現在の位置がラベル付けされています。NOAA NCEI GIS バージョン 3.1 (www.ncei.noaa.gov/maps/radar) から同化されたレーダー データ。
5 結論
2021 年の BASS 飛行キャンペーンでは、19 日間にわたって 42 回のヘリオトロープ打ち上げが試みられ、そのうち 28 回が成功しました。エンベロープと飛行ラインはすべての飛行でほぼ同じでしたが、唯一の大きな違いは、2 つではなく 1 つのペイロードのみを搭載した飛行のサブセットと、異なる打ち上げ方法の使用でした。ヘリオトロープは、従来の地上、ヘリウム補助、またはヘリウム増強のいずれかの方法で打ち上げられました。ヘリウム増強は、この飛行キャンペーン中に開発されました。浮上に必要な時間は、打ち上げ方法によって大きく異なりました。ヘリウム増強打ち上げでは、離陸速度が大幅に増加し、平均上昇率がわずかに増加しました。離陸速度と初期上昇率を除けば、残りの飛行を通じて、打ち上げ方法への大きな依存性は見られませんでした。直径 7 メートルのヘリオトロープは、3.2 kg のペイロードを平均高度 19.3 km まで一貫して打ち上げました。フロート ステージは、ほとんどの飛行中に高度の変動が比較的小さかったものの、上昇傾向が見られました。最大の上昇傾向を調査したところ、ヘリオトロープは最高高度の期間中に発達中の嵐のシステム上を通過したことがわかりました。ヘリオトロープの大部分は、平均して日没の 36 分前から平均降下率 -2.8 m s-1 で徐々に地球に降下しました。すべてのペイロードは、2021 年の BASS 飛行キャンペーン中に回収されました。BASS 2021 飛行キャンペーンは、ヘリオトロープの打ち上げと大気の挙動に関する重要なデータを提供しただけでなく、将来の実験計画の基礎も築きました。この画期的な研究は、この種の研究としては初めてのもので、さまざまな打ち上げ方法がヘリオトロープの性能に与える影響を調査するための堅牢な枠組みを確立し、特にヘリウム増強型の新しいアプローチを実証しました。フロート段階への一貫した成功とすべてのペイロードの回収は、実装された方法論の信頼性と回復力を強調しています。また、公称フロート段階の動作からの逸脱に基づいてヘリオトロープが嵐のシステム上を飛行していた時期を特定することで、大気研究への潜在的な応用も強調されます。今後、BASS 2021 から学んだ教訓は、将来の実験の設計と実行に情報を提供し、ガイドし、大気現象の理解を深め、この分野でのその後の科学的取り組みの効率と成功を高めます。
成層圏での数時間にわたる飛行中のヘリオトロープ ソーラー熱気球の性能特性
概要
ヘリオトロープは、パッシブ ソーラー熱気球で、成層圏下部で数時間にわたってほぼ水平飛行が可能です。これらの安価な飛行プラットフォームは、製造コストが低いため、高頻度で成層圏を感知できますが、その性能はまだ体系的に評価されていません。2021年 7月から 9月にかけて、29 機のヘリオトロープがオクラホマ州から打ち上げられ、気球ベースの音響地震学研究 (BASS) の一環として浮上高度を達成しました。キャンペーン全体を通じて、ヘリオトロープのエンベロープはすべてほぼ同じで、飛行ラインにわずかな変化が見られました。このキャンペーン中に収集された飛行データは、打ち上げ、上昇、浮上、下降中の典型的なヘリオトロープの飛行動作を特徴付けるための大規模なサンプルです。各飛行段階の特徴が明らかにされ、さまざまなパラメータへの依存性が定量化され、通常飛行と異常飛行について説明されています。 1 はじめに ヘリオトロープ (Bowman et al., 2020) は、ほぼ一定の高度で数時間にわたって科学的なペイロードを対流圏上部と成層圏下部に運ぶことができるパッシブソーラー熱気球です。0.31 ミルの高密度ポリエチレンシート (金物店では「ペインターズプラスチック」として一般的に販売されています) で作られた球状のエンベロープで構成されています。バルーンの内部は、花火グレードの浮遊木炭パウダーを使用して暗くされています。この暗くなった材料は太陽光を吸収し、内部の空気を加熱して、グラムからキログラム規模のペイロードを成層圏下部に打ち上げます。比較的低コストで建造が容易なため、ここ数年でその使用が急速に増加しています (例: Brissaud et al. 2021、Bowman
と Krishnamoorthy 2021、Schuler et al. 2022、Silber et al. 2023)。これらの研究のほとんどは、特定の対象に向けて打ち上げられたヘリオトロープのサンプル数が比較的少ないものでした。その結果、研究間の飛行力学の比較から得られる知見は、打ち上げ場所間の材料、建造手順、大気条件の違いにより、限られた価値しかありませんでした。しかし、2021 年の夏には、バルーンベースの音響地震学研究 (BASS) の一環として、合計 29 個のヘリオトロープがオクラホマ州から打ち上げられました。この論文では、ヘリオトロープの通常の飛行挙動を特定するために、飛行段階 (上昇、浮上、下降) を特徴付けています。これは、ヘリオトロープを利用するプロジェクトを計画する際の指針となるだけでなく、他の研究からの飛行ダイナミクスを比較するためのベースライン パフォーマンスを確立します。
2021 年の BASS 飛行キャンペーン中に使用されたヘリオトロープは、打ち上げ直後の図 1 に示されています。この図には、バルーン エンベロープ (バルーンの素材)、シュラウド (ヘリオトロープ開口部付近の強化領域)、およびパラシュートと 2 つの (上部と下部の) ペイロード (計器類を保持するパッケージ) を含む飛行ラインが示されています。一般的なヘリオトロープの飛行は、産業用フロア ドラム ファンなどの送風機を使用してエンベロープに空気を充填することから始まります。太陽光がバルーンを温めると、バルーンは最終的に浮力を持ち、飛行構成と大気の状態に応じて徐々に浮上高度まで上昇します。バルーンが浮上すると、ほぼ 1 日中水平飛行を維持します。日没の少し前にバルーンは地球に向かって降下し始め、ヘリオトロープとペイロードを回収できるようになります。
図 1. 打ち上げ直後のヘリオトロープ (フライト 16.2) の写真。エンベロープ、シュラウド、パラシュート、ペイロード (上部と下部) が確認できます。
ヘリオトロープの開発は 2012年に始まり、その後 3 年間にわたってさまざまな形状とサイズがテストされました。十分に文書化された最初の 1 日のヘリオトロープ飛行は 2016 年に行われました。この飛行では、現在の BASS キャンペーンと同様に、超低周波音 (つまり、人間の可聴周波数より低い 20 Hz 未満の音) を測定するためのマイクロ気圧計が搭載されました (Young ら、2018年)。準球形の気球エンベロープは、2017 年の別の飛行キャンペーンで初めてヘリオトロープと名付けられました (Bowman と Albert、2018 年)。ヘリオトロープの科学的用途のほとんどは、音波の記録と成層圏エアロゾルの現場測定に重点が置かれてきました。 BASS キャンペーンは、大気圏に伝播する音波を介して地震活動を検出できることを証明することを目的としていました。これは、金星の地震学を実施する手段として、金星の大気圏内の高高度にマイクロ気圧計を配置する可能性を評価することが目的の一部でした。金星での直接的な地震測定は、主に表面温度が約 460 °C、圧力が約 90 気圧 (例: Stofan 他 1993 年、Cutts 他 2015 年) であるためセンサーの性能が難しく、これまで行われてきませんでした。しかし、金星の中層大気 (高度 45 ~ 79km) はそれほど厳しくないため、現在利用可能なセンサーを使用できる可能性があります。したがって、2021 年の BASS 飛行キャンペーンの主な目的は、下層成層圏に浮かぶヘリオトロープを使用して自然地震の音響特性を特定することでした。この取り組みは地球に類似した実験として機能し、気球を使用して金星の地震活動の検出をシミュレートしました (Krishnamoorthy and Bowman 2023)。ただし、地震活動の研究は現在の研究の焦点ではありません。むしろ、この研究ではこれらの飛行を利用して、ヘリオトロープ飛行の各段階をさらに調査および特徴付け、飛行プラットフォームのパフォーマンスをよりよく理解します。原稿のセクション 2 では、エンベロープとリギング、飛行ラインと計器、飛行操作、飛行日の概要など、採用された方法について説明します。セクション 3 では、飛行の各段階 (打ち上げと上昇、浮上、下降と着陸) を特徴付けます。セクション 4 では、典型的な公称飛行、異常な飛行の観察について説明します。最後に、セクション 5 で結論を導き出します。
図 2. (a、c) 従来の地上打ち上げと (b、d) ヘリウム支援打ち上げの写真。(a、b) 打ち上げ直前、(c、d) エンベロープが空中に浮上した後。
図 3. 一般的な飛行 (フライト 4.2) における上部ペイロード IMU と APRS トラッカーからの高度データ。飛行段階 (上昇、浮遊、下降) を示しています。発射時と着陸時の高度は、水平の破線で示されています。IMU は APRS よりもサンプリング レートが高い (つまり、データ ポイントが非常に近いため太い線で表示されます) のですが、浮遊段階が終了する前に電力が失われます。段階の開始と終了、および日の出/日の入りを示す線も参考のために含まれています。
図 4. (a) 地上、(b) ヘリウム補助、(c) タイプ 1 (上空で破裂) ヘリウム補助、(d) タイプ 2 (下空で破裂) ヘリウム補助の打ち上げシーケンス。時間は、指定されたフライトの打ち上げ時間に対して測定されます。地上打ち上げは最も遅い上昇プロファイルを示しますが、ヘリウム補助打ち上げは、初期の上昇率が高く、同様のプロファイルを示します。ヘリウム補助打ち上げは、タイプ 1 (浮遊高度を超えるヘリウム バルーンの破裂) とタイプ 2 (浮遊高度を下回るヘリウム バルーンの破裂) に分けられます。
図 5. 平均フロート高度 (Z𝑓) で正規化した高度 (z) を、(a) 地上、(b) ヘリウム増強、(c) タイプ 1 (フロート上方バースト) ヘリウム補助、(d) タイプ 2 (フロート下方バースト) ヘリウム補助打ち上げの上昇中の垂直速度 (𝑉𝑉𝑧𝑧) に対してプロットしたもの。青い破線の水平線は、ヘリウム気球が気球をフロート高度より上に持ち上げる (c) を除き、フロート高度の 3 分の 2 を示しています。
4 考察
a. 公称飛行挙動
公称飛行挙動は、浮上しデータが正常に記録された 28 回のヘリオトロープ飛行 (地上打ち上げ 9 回、ヘリウム増強 8 回、ヘリウム補助 11 回) に基づいて決定されます。打ち上げ中の地上条件は、気温が 13 ~ 28 °C で、平均太陽放射照度は約 300 W m-2 でした。地上、ヘリウム増強、ヘリウム補助打ち上げの平均 (最大) 風速は、それぞれ 1.3 m s-1 (2.5 m s-1)、1.7 m s-1 (2.0 m s-1)、2.1 m s-1 (5.1 m s-1) でした。離陸時の平均垂直速度は、地上、ヘリウム増強、ヘリウム補助打ち上げでそれぞれ公称 0.5、1.2、4.4 m s-1 でした。上昇率は上昇し、浮上高度の約 3 分の 2 で最大に達しました。ヘリウム増強打ち上げは、最大上昇率に達する前は地上打ち上げに比べてわずかに高い上昇率を示しましたが、高高度では差はほとんどありませんでした。ヘリウム補助上昇は、ヘリウム気球の状態と充填量に左右されます。打ち上げから浮上までの平均時間は、打ち上げ方法に応じて 104 分 (ヘリウム補助タイプ 1、浮上上方破裂) から 223 分 (地上) の範囲でした。個々のヘリオトロープの平均浮上高度は 17.4 km から 22.2 km の範囲で、浮上段階の高度の平均標準偏差は 0.2 km でした。打ち上げ方法と平均浮上高度の間には明らかな依存関係はなく、すべての飛行の平均は 19.3 km でした。これは、ヘリウム補助打ち上げではエンベロープに系統的な損傷が発生せず、ヘリウム増強打ち上げではヘリウムが浮上する前にエンベロープから排出されたことを示しています。浮上高度の高次統計では、分布の裾が正規分布よりもわずかに重く、低高度に偏っていることが示されています。浮上段階の高度のスペクトログラムでは、すべての飛行で約 150 秒周期の有意なスペクトル コンテンツが生成されていることが示されました。ほとんどの飛行では、150 秒を超える周期で有意な非線形スペクトル コンテンツも示されました。降下は、ヘリオトロープの位置(緯度、経度、高度)で日没の平均 36 分前に始まりました。通常の飛行では、ヘリオトロープのエンベロープはシュラウド リングと飛行ラインに取り付けられたままでした。これらの 20 回の通常の降下の平均降下率は 2.8 m s-1 で、平均衝突速度は 2.2 m s-1 でした。降下開始から着陸までの平均時間は 91 ± 19 分で、地上への着陸の平均時間は日没後 55 分と名目上設定されています。通常の着陸以外の着陸(ハード ランディング)の場合、飛行ラインに設置されたパラシュートを使用して衝突速度を制御する必要があります。
b. 異常な飛行の観察
1) 再発射
通常、ヘリオトロープは、エンベロープが停止前に接触する際に引きずられるため、着陸時に損傷します。その結果、着陸したヘリオトロープは通常、大幅な修理を行わなければ飛行できなくなります。しかし、2021年のBASS飛行キャンペーンでは、2機のヘリオトロープが着陸し、その後再発射しました。フライト3.1は、従来の地上発射で、最初は午前8時35分頃(UTC-5)に発射され、比較的一定の上昇率で地上約458メートルまで上昇しました。その後、午前8時50分(UTC-5)に上昇が止まり、徐々に地上に下降しました。目撃者は、エンベロープに明らかな損傷の兆候がなく、10時41分(UTC-5)に再び空中に浮上するのを目撃しました。フライト3.1の残りの飛行は正常でした。浮上高度の標準偏差は比較的高かったものの(437メートル)、その日に発射されたもう1機の気球(フライト3.2)の浮上高度の標準偏差はより大きかった(452メートル)。 2 回目の再打ち上げ (フライト 15.3) は、通常の上昇、浮遊、下降、着陸を伴う増強打ち上げでした。翌朝、私たちのチームは土地所有者に連絡を取り、図 10 に示すように、ヘリオトロープがエンベロープと両方のペイロードを無傷のまま着陸したことを確認しました。しかし、その日の午後 2 時 59 分 (UTC-5)、上部ペイロード衛星トラッカーは動きを報告しましたが、下部ペイロード衛星トラッカーは報告しませんでした。私たちのチームは土地所有者に再度連絡を取り、午後 3 時 (UTC-5) 頃にヘリオトロープが空中に浮き上がり、下部ペイロードが外れ、その後気球が視界から消えたことを確認できました。 APRS トラッカーは 2 回目の飛行について報告せず、ペイロード バッテリーが消耗していたため、2 回目の飛行に関する情報はほとんどありません。2 日目に搭載された SPOT 衛星トラッカーを使用すると、気球は再発射時に最初は北に移動し、北東に少なくとも 5.7 km 移動した後、南に向きを変えたことが分かります。
エンベロープと上部ペイロードは南に 113 km 浮遊し、最終的にテキサス州のキャド国立草原に着陸しました。
図 10。(a) 目撃者の説明に基づくフライト 15.3 の最初の着陸のスケッチ (エンベロープと飛行経路)。衛星画像に重ねて表示 (Google)。(b) 上部ペイロードが 2 日目に SPOT 衛星トラッカーから報告された、ペイロードが動いていたか静止していたかを示すレポート (Google)。
2) 浮遊中の上方逸脱
以前の研究では、太陽風船が雷雨の上を通過したときに 1 km 以上の高度逸脱が発生したことが指摘されています。アルベドの急激な増加により加熱が増加し、その結果高度が上昇すると推測されました (Wheeler 他 2022)。 2021年のBASS飛行キャンペーン中、フライト3.2は、初期の比較的水平な浮遊高度から5時間以上にわたって高度が大きく(1 km以上)上昇しました。これが、この飛行中の現地の気象条件の調査のきっかけとなり、浮遊段階の高度が気象レーダーからの反射のスナップショットとともに図11にプロットされています。これは、ヘリオトロープの高度が嵐が形成される直前に上昇し始めたことを示しています。これは、対流の開始期間に相当します。14:50(UTC-5)に、ヘリオトロープは2つの嵐システムの上にあり、それらは急速に合体し、東に移動するこれらの嵐の裏側にヘリオトロープを押し込んだようです。15:40(UTC-5)に、NOAAは、残留流出と中規模対流渦から発生したかなりの雷雨風が、この嵐の領域内で対流を開始するのに役立ったと報告しました。ヘリオトロープが東に移動する嵐の西側になると、フロート高度は最初の 100 分間のフロート高度とほぼ同じ高さに戻りました。これは、大きな変動 (1 km 以上) が雷雨と関連しているという観察結果を強く裏付けています。注目すべきは、図 6b に示す小さな上昇変動も調査されており、これはフロート段階中にヘリオトロープ領域で発生したいくつかの嵐を伴う小さな嵐の上空であったことです。
3) ハード ランディング 8 回のハード ランディングの根本的な原因は、ヘリオトロープ エンベロープがフライト ラインから外れたことでした。回収されたフライト ラインに基づくと、故障のメカニズムは、ヘリオトロープの口のシュラウド リングからエンベロープのプラスチックが引き裂かれたことでした。回収されたエンベロープとフライト ラインの損傷に関連する不確実性を考慮すると、この故障の詳細な分析を行うことは困難です。ただし、APRS トラッカーから記録された降下率の変化から、故障の高度を名目上推定できます。興味深い観察結果は、すべての故障が対流圏界面の前または近くで発生しているように見えることです。これは、APRS トラッカーから報告された温度測定値から名目上推定されました。乱気流の最大値は対流圏界面付近で発生します (例: Söder 他 2021)。これは、エンベロープが対流圏界面を通過しても無傷のままであれば、名目上の着陸になる可能性が高いことを示唆しています。
図 11。(上) 浮遊段階におけるフライト 3.2 高度の時間トレース。気象レーダー画像に対応する時間がマークされています。破線は、浮遊の最初の 100 分間の平均浮遊高度です。
(下) フライト 3.2 中の (a) 12:45、(b) 14:00、(c) 14:50、(d) 15:15、(e) 15:40、(f) 16:05、(g)
16:30、(h) 16:55 (UTC-5) の気象レーダー反射率。黄色で軌跡がトレースされ、現在の位置がラベル付けされています。NOAA NCEI GIS バージョン 3.1 (www.ncei.noaa.gov/maps/radar) から同化されたレーダー データ。
5 結論
2021 年の BASS 飛行キャンペーンでは、19 日間にわたって 42 回のヘリオトロープ打ち上げが試みられ、そのうち 28 回が成功しました。エンベロープと飛行ラインはすべての飛行でほぼ同じでしたが、唯一の大きな違いは、2 つではなく 1 つのペイロードのみを搭載した飛行のサブセットと、異なる打ち上げ方法の使用でした。ヘリオトロープは、従来の地上、ヘリウム補助、またはヘリウム増強のいずれかの方法で打ち上げられました。ヘリウム増強は、この飛行キャンペーン中に開発されました。浮上に必要な時間は、打ち上げ方法によって大きく異なりました。ヘリウム増強打ち上げでは、離陸速度が大幅に増加し、平均上昇率がわずかに増加しました。離陸速度と初期上昇率を除けば、残りの飛行を通じて、打ち上げ方法への大きな依存性は見られませんでした。直径 7 メートルのヘリオトロープは、3.2 kg のペイロードを平均高度 19.3 km まで一貫して打ち上げました。フロート ステージは、ほとんどの飛行中に高度の変動が比較的小さかったものの、上昇傾向が見られました。最大の上昇傾向を調査したところ、ヘリオトロープは最高高度の期間中に発達中の嵐のシステム上を通過したことがわかりました。ヘリオトロープの大部分は、平均して日没の 36 分前から平均降下率 -2.8 m s-1 で徐々に地球に降下しました。すべてのペイロードは、2021 年の BASS 飛行キャンペーン中に回収されました。BASS 2021 飛行キャンペーンは、ヘリオトロープの打ち上げと大気の挙動に関する重要なデータを提供しただけでなく、将来の実験計画の基礎も築きました。この画期的な研究は、この種の研究としては初めてのもので、さまざまな打ち上げ方法がヘリオトロープの性能に与える影響を調査するための堅牢な枠組みを確立し、特にヘリウム増強型の新しいアプローチを実証しました。フロート段階への一貫した成功とすべてのペイロードの回収は、実装された方法論の信頼性と回復力を強調しています。また、公称フロート段階の動作からの逸脱に基づいてヘリオトロープが嵐のシステム上を飛行していた時期を特定することで、大気研究への潜在的な応用も強調されます。今後、BASS 2021 から学んだ教訓は、将来の実験の設計と実行に情報を提供し、ガイドし、大気現象の理解を深め、この分野でのその後の科学的取り組みの効率と成功を高めます。










※コメント投稿者のブログIDはブログ作成者のみに通知されます