








海王星と天王星にカッシーニの様な放射性同位体を電源の熱源にした探査機を送り込む際に大気圏を掠めることで、減速用推進剤を節約しようという計画。基本的に燃え尽きない様に濃すぎない大気の層を速すぎない速度で通過する。大気圏を出て高度が確保できたらロケットを噴射して近惑星点を上げて衛星軌道に乗る。以下、機械翻訳。
氷巨大惑星エアロキャプチャーミッション上の揚力・抗力変調制御の比較
2023年9月25日
概要
Aerocapture は大気を利用した軌道挿入技術です。
単一のパスからドラッグして宇宙船を減速します。
従来の推進挿入に比べ、エアロキャプチャーにより大きな速度を与えることができます
推進剤をほとんど使わずに宇宙船の軌道を変化させます。 の遥か彼方で
太陽系外縁部では、氷の巨人は依然として最後のクラスの惑星である。
オービターを使って探査されました。 彼らの膨大な太陽中心距離は、ミッション設計の重要な課題、特にミッションに必要な大きなΔV
軌道挿入。 これにより、航空撮影は魅力的な軌道方法となります
挿入は可能ですが、ナビゲーションが比較的大きいため困難でもあります
そして大気の不確実性。 本研究では以下の比較を行っている。
揚力と抗力の調整制御と将来への影響
ミッション。 リフト変調により、入口通路の幅が従来の約 2 倍になります。
抗力調整により、より大きな不確実性に対応できます。 リフト
モジュレーションにより、飛行全体を通して継続的な制御が可能になり、
実際に発生した密度プロファイルに応じて軌道を調整します。
抗力調整により、より良好な空気熱条件が提供されます。
リフトモジュレーションとの比較。 ドラッグモジュレーションではコントロールがありません
ドラッグスカートの脱着後の権限により、車両はより影響を受けやすくなります
投棄イベント後に発生する密度変化による終了状態エラー。
キーワード: 揚力モジュレーション、抗力モジュレーション、アイスジャイアント、エアロキャプチャ
I.はじめに
Aerocapture は、単一パスからの大気抵抗を使用して軌道を減速する軌道挿入技術です。
宇宙船 [1、2]。 従来の推進挿入と比較して、エアロキャプチャーは大きな速度変化を与えることができます。
推進剤をほとんど使わない宇宙船 [3]。 太陽系の果てでは、氷の巨人が最後のクラスとして残っています。
オービター宇宙船を使用して惑星を探索する [4、5、6]。 それらの膨大な太陽中心距離は重要な意味を持ちます。
ミッション設計の課題、特に軌道投入に必要な大きなΔV [7]。 これにより、エアロキャプチャーが可能になります。
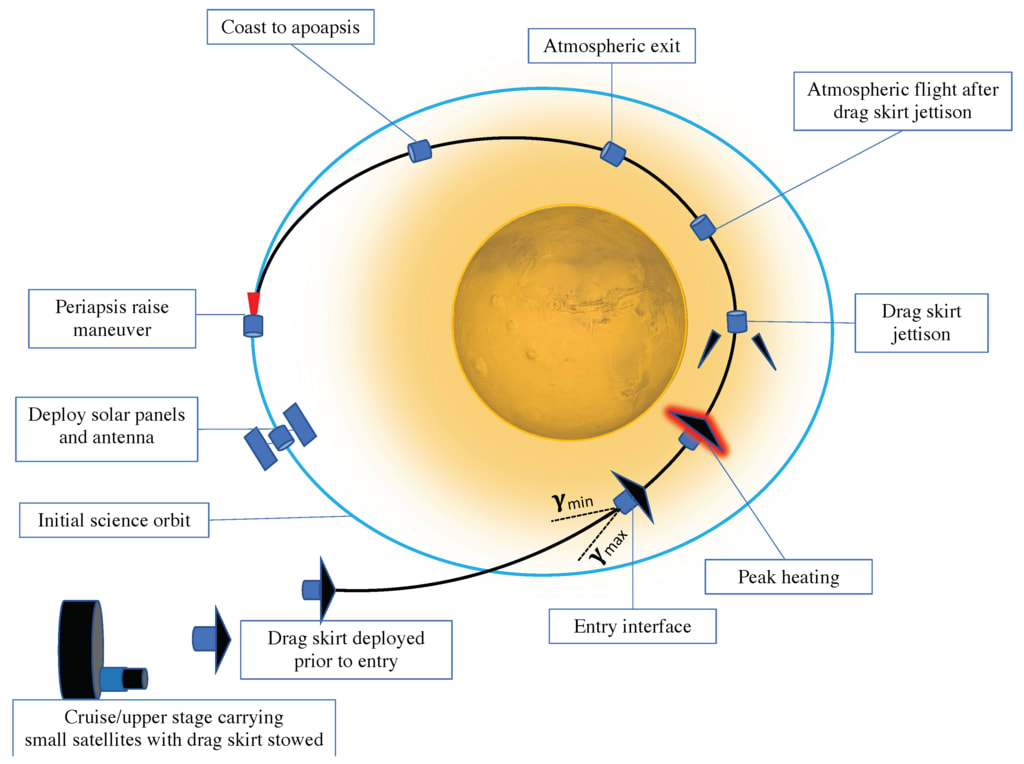
氷の巨人、天王星と海王星に軌道を挿入する魅力的な方法 [8、9]。 図 1 に、
航空機が大気圏に突入してエネルギーを減少させ、その後大気圏から離脱する航空捕獲機動。
ナビゲートされた配送状態、大気、および車両の空気力学における不確実性を考慮して、
望ましい出口状態の大気圏に到達するには、車両がその走行中に空力制御権限を持つ必要があります。
フライト[10]。 車両が急勾配に進入して大気圏に深く突入すると、エネルギーが過剰に流出し、
出られない可能性があります。 車両が浅いところに進入すると、十分なエネルギーが放出されず、捕らえられずに脱出する可能性があります。
空力制御により、車両は通路内の軌道を自律的に制御できるため、
エネルギーの枯渇。 最近の NASA の研究では、揚力と抗力の調整制御の比較の必要性が強調されています。
天王星と海王星で[11]。 本研究では、Aerocapture Mission Analysis Tool (AMAT) を使用して、
揚力と抗力の調整制御と氷巨大惑星エアロキャプチャーミッションへの影響の比較[12]。

図 1. 航空捕獲機動の概略図。
II. リフトモジュレーション
バンク角変調 (揚力変調のサブセット) は、アポロ計画と MSL ミッションで成功裏に使用されました。
これは実証済みでよく理解されているテクニックです。 唯一の制御変数はバンク角であり、リフトを指示することによって
ベクトルを上下に変えることで、車両は降下速度とエネルギーの消耗を制御できます。 氷の巨人の航空捕獲に関する初期の研究
2000 年代の海王星では、大きな不確実性に対応するために中程度の L/D (L/D=0.8) エアロシェルを使用していました [13]。
しかし、最近の研究では、高到着 v_inf 軌道を使用することで、低 L/D の使用が可能になることが示されています。
MSL (L/D = 0.24) などのエアロシェルに使用できると同時に、飛行時間の短縮も可能になります [14、15]。 図 2 はエアロキャプチャを示しています
秒速 29 km で天王星に突入する MSL のような乗り物の軌道。 目標到達距離は50万km。 エアロキャプチャー
コリドーは [-12, -11] 度、幅 1.0 度です。 ピーク減速度は 4 ~ 10g の範囲にあり、ピーク熱は
速度は 1400 ~ 1800 W/cm2 の範囲です。 エアロキャプチャーのピーク ヒート レートはエントリーのピーク レートよりも大幅に低い
プローブはより急勾配に入り、HEEET 熱保護システムのテスト済み限界内に十分に収まります [16]。 暑さ
負荷は 200 ~ 300 kJ/cm2 の範囲にあり、これはかなりの量ですが、HEEET の能力の範囲内であると予想されます。
経験的な関係に基づいて、TPS の質量分率は約 25% であると予想され、構造的な質量分率は次のようになります。
も 25% であると予想されており、到着質量の約 50% が航空捕獲後に軌道に投入されることになります [17、18]。

図 2. MSL のようなエアロシェルを使用した天王星の揚力変調エアロキャプチャー軌道 (L/D=0.24)
Ⅲ. ドラッグモジュレーション
抗力調整は、推進剤を供給する反応制御スラスターの必要性を回避する、よりシンプルな制御技術です。
バンク角の変調に必要です [19]。 最も単純な変形である単一イベント放出では、唯一の制御変数は次のとおりです。
ドラッグスカートが放棄される時点。 放出時間を調整することで、エネルギーの消耗を制御できます。
大気圏飛行中ずっと継続的な制御を提供する揚力調整とは異なり、抗力調整は何も提供しません。
ドラッグスカート投棄後の管理権限。 ドラッグモジュレーションは、低弾道係数エントリーシステムを使用しており、
高弾道係数の剛性エアロシェルを使用する揚力変調と比較して、加熱速度が大幅に低くなります。 低い
弾道係数システムは大気圏でははるかに高い速度で減速し、加熱速度を低く保ちます。 しかし
柔軟な TPS (ADEPT で使用されるカーボン クロスなど) は、より小さい熱量 (200 ~ 300 W/cm2) にしか対応できません。
したがって、高速の到着軌道を使用することはできません [20、21]。 図 3 は、12 m の公称航空捕捉軌道を示しています。
ADEPT 抗力調整ビークル (ベータ = 30 kg/m2、BC 比 = 4.14) が秒速 26 km で天王星に突入 [22]。 ターゲット
遠点は50万kmです。 Aerocapture コリドーは [-10.71, -10.25] 度、幅 0.46 度です。 ピーク
減速度は 5g、ピーク発熱量は約 300 W/cm2 です。 総熱負荷は約 77 kJ/cm2 です。 推定
軌道に運ばれる到着質量の割合は 50% であり、これは揚力変調による航空捕捉と同じです [23]。

図 3. 直径 12 m の ADEPT による天王星の抗力変調航空捕捉軌道。
IV. 比較
表 1 は、天王星の揚力と抗力の調整結果を比較しています。 最初の観察は、リフト変調が
高い進入速度により、抗力調整のほぼ 2 倍のコリドー幅が得られます。 これは、リフト変調が可能であることを意味します。
抗力調整と比較して、より高い航行と配送の大気の不確実性に対応します。 さらにリフトアップ
モジュレーションは飛行中ずっと継続的な制御を提供し、実際の飛行状況に応じて軌道を調整できるようにします。
密度プロファイルが見つかりました。 ドラッグモジュレーションを使用すると、ドラッグスカートを解放した後は制御権限がありません。
車両は、大気中に存在する可能性のある予期せぬ密度ポケットやその他の変動の影響を受けやすい[24]。
2 番目の違いは、揚力変調のピーク熱量が 1400 ~ 1800 W/cm2 の範囲にあることです。
空気抵抗調整エアロキャプチャーの場合は 200 ~ 300 W/cm2 と比較します。 結果として生じる総熱負荷は 200 ~ 300 の範囲になります。
揚力調整の場合は kJ/cm2、抗力調整の場合は 40 ~ 75 kJ/cm2。 したがって、低弾道係数システムが使用されています。
抗力調整は、揚力調整と比較して、はるかに穏やかな空気熱環境を提供します [25、26]。
3 番目の違いは、揚力調整の場合、到達速度が速い場合でも、ピーク ヒート レートが十分に範囲内に収まることです。
HEEET のテスト済み限界。 抗力調整の場合、ピークヒートレートはカーボンクロス TPS の上限に近くなります。
約 250 W/cm2 までテストされます。 したがって、リフト変調アーキテクチャは、高い到着速度に対応できます。
これは高エネルギー、短い飛行時間の軌道で発生しますが、抗力変調アーキテクチャはより制限される傾向があります。
カーボンクロス TPS のピーク熱速度の制約による最大到達速度の条件 [27]。
表 1. 天王星の揚力と抗力の調整による航空捕捉の比較。

V. 結論
この研究では、揚力と抗力の調整技術を比較し、氷の巨人に対するそれらの影響を調査しました。
エアロキャプチャー。 揚力変調は抗力変調のほぼ 2 倍のコリドー幅を提供するため、
より大きな配達と大気の不確実性。 揚力変調により飛行中の継続的な制御が可能になり、
実際に発生した密度プロファイルに応じて軌道を調整します。 ドラッグモジュレーションはさらに多くのことを提供します
揚力調整と比較して、エアロキャプチャにとって良好な空気熱条件。 ドラッグモジュレーションではコントロールがありません
ドラッグスカートの放出後には、車両が公称値から外れた密度変動の影響を受けやすくなります。
氷巨大惑星エアロキャプチャーミッション上の揚力・抗力変調制御の比較
2023年9月25日
概要
Aerocapture は大気を利用した軌道挿入技術です。
単一のパスからドラッグして宇宙船を減速します。
従来の推進挿入に比べ、エアロキャプチャーにより大きな速度を与えることができます
推進剤をほとんど使わずに宇宙船の軌道を変化させます。 の遥か彼方で
太陽系外縁部では、氷の巨人は依然として最後のクラスの惑星である。
オービターを使って探査されました。 彼らの膨大な太陽中心距離は、ミッション設計の重要な課題、特にミッションに必要な大きなΔV
軌道挿入。 これにより、航空撮影は魅力的な軌道方法となります
挿入は可能ですが、ナビゲーションが比較的大きいため困難でもあります
そして大気の不確実性。 本研究では以下の比較を行っている。
揚力と抗力の調整制御と将来への影響
ミッション。 リフト変調により、入口通路の幅が従来の約 2 倍になります。
抗力調整により、より大きな不確実性に対応できます。 リフト
モジュレーションにより、飛行全体を通して継続的な制御が可能になり、
実際に発生した密度プロファイルに応じて軌道を調整します。
抗力調整により、より良好な空気熱条件が提供されます。
リフトモジュレーションとの比較。 ドラッグモジュレーションではコントロールがありません
ドラッグスカートの脱着後の権限により、車両はより影響を受けやすくなります
投棄イベント後に発生する密度変化による終了状態エラー。
キーワード: 揚力モジュレーション、抗力モジュレーション、アイスジャイアント、エアロキャプチャ
I.はじめに
Aerocapture は、単一パスからの大気抵抗を使用して軌道を減速する軌道挿入技術です。
宇宙船 [1、2]。 従来の推進挿入と比較して、エアロキャプチャーは大きな速度変化を与えることができます。
推進剤をほとんど使わない宇宙船 [3]。 太陽系の果てでは、氷の巨人が最後のクラスとして残っています。
オービター宇宙船を使用して惑星を探索する [4、5、6]。 それらの膨大な太陽中心距離は重要な意味を持ちます。
ミッション設計の課題、特に軌道投入に必要な大きなΔV [7]。 これにより、エアロキャプチャーが可能になります。
氷の巨人、天王星と海王星に軌道を挿入する魅力的な方法 [8、9]。 図 1 に、
航空機が大気圏に突入してエネルギーを減少させ、その後大気圏から離脱する航空捕獲機動。
ナビゲートされた配送状態、大気、および車両の空気力学における不確実性を考慮して、
望ましい出口状態の大気圏に到達するには、車両がその走行中に空力制御権限を持つ必要があります。
フライト[10]。 車両が急勾配に進入して大気圏に深く突入すると、エネルギーが過剰に流出し、
出られない可能性があります。 車両が浅いところに進入すると、十分なエネルギーが放出されず、捕らえられずに脱出する可能性があります。
空力制御により、車両は通路内の軌道を自律的に制御できるため、
エネルギーの枯渇。 最近の NASA の研究では、揚力と抗力の調整制御の比較の必要性が強調されています。
天王星と海王星で[11]。 本研究では、Aerocapture Mission Analysis Tool (AMAT) を使用して、
揚力と抗力の調整制御と氷巨大惑星エアロキャプチャーミッションへの影響の比較[12]。
図 1. 航空捕獲機動の概略図。
II. リフトモジュレーション
バンク角変調 (揚力変調のサブセット) は、アポロ計画と MSL ミッションで成功裏に使用されました。
これは実証済みでよく理解されているテクニックです。 唯一の制御変数はバンク角であり、リフトを指示することによって
ベクトルを上下に変えることで、車両は降下速度とエネルギーの消耗を制御できます。 氷の巨人の航空捕獲に関する初期の研究
2000 年代の海王星では、大きな不確実性に対応するために中程度の L/D (L/D=0.8) エアロシェルを使用していました [13]。
しかし、最近の研究では、高到着 v_inf 軌道を使用することで、低 L/D の使用が可能になることが示されています。
MSL (L/D = 0.24) などのエアロシェルに使用できると同時に、飛行時間の短縮も可能になります [14、15]。 図 2 はエアロキャプチャを示しています
秒速 29 km で天王星に突入する MSL のような乗り物の軌道。 目標到達距離は50万km。 エアロキャプチャー
コリドーは [-12, -11] 度、幅 1.0 度です。 ピーク減速度は 4 ~ 10g の範囲にあり、ピーク熱は
速度は 1400 ~ 1800 W/cm2 の範囲です。 エアロキャプチャーのピーク ヒート レートはエントリーのピーク レートよりも大幅に低い
プローブはより急勾配に入り、HEEET 熱保護システムのテスト済み限界内に十分に収まります [16]。 暑さ
負荷は 200 ~ 300 kJ/cm2 の範囲にあり、これはかなりの量ですが、HEEET の能力の範囲内であると予想されます。
経験的な関係に基づいて、TPS の質量分率は約 25% であると予想され、構造的な質量分率は次のようになります。
も 25% であると予想されており、到着質量の約 50% が航空捕獲後に軌道に投入されることになります [17、18]。
図 2. MSL のようなエアロシェルを使用した天王星の揚力変調エアロキャプチャー軌道 (L/D=0.24)
Ⅲ. ドラッグモジュレーション
抗力調整は、推進剤を供給する反応制御スラスターの必要性を回避する、よりシンプルな制御技術です。
バンク角の変調に必要です [19]。 最も単純な変形である単一イベント放出では、唯一の制御変数は次のとおりです。
ドラッグスカートが放棄される時点。 放出時間を調整することで、エネルギーの消耗を制御できます。
大気圏飛行中ずっと継続的な制御を提供する揚力調整とは異なり、抗力調整は何も提供しません。
ドラッグスカート投棄後の管理権限。 ドラッグモジュレーションは、低弾道係数エントリーシステムを使用しており、
高弾道係数の剛性エアロシェルを使用する揚力変調と比較して、加熱速度が大幅に低くなります。 低い
弾道係数システムは大気圏でははるかに高い速度で減速し、加熱速度を低く保ちます。 しかし
柔軟な TPS (ADEPT で使用されるカーボン クロスなど) は、より小さい熱量 (200 ~ 300 W/cm2) にしか対応できません。
したがって、高速の到着軌道を使用することはできません [20、21]。 図 3 は、12 m の公称航空捕捉軌道を示しています。
ADEPT 抗力調整ビークル (ベータ = 30 kg/m2、BC 比 = 4.14) が秒速 26 km で天王星に突入 [22]。 ターゲット
遠点は50万kmです。 Aerocapture コリドーは [-10.71, -10.25] 度、幅 0.46 度です。 ピーク
減速度は 5g、ピーク発熱量は約 300 W/cm2 です。 総熱負荷は約 77 kJ/cm2 です。 推定
軌道に運ばれる到着質量の割合は 50% であり、これは揚力変調による航空捕捉と同じです [23]。
図 3. 直径 12 m の ADEPT による天王星の抗力変調航空捕捉軌道。
IV. 比較
表 1 は、天王星の揚力と抗力の調整結果を比較しています。 最初の観察は、リフト変調が
高い進入速度により、抗力調整のほぼ 2 倍のコリドー幅が得られます。 これは、リフト変調が可能であることを意味します。
抗力調整と比較して、より高い航行と配送の大気の不確実性に対応します。 さらにリフトアップ
モジュレーションは飛行中ずっと継続的な制御を提供し、実際の飛行状況に応じて軌道を調整できるようにします。
密度プロファイルが見つかりました。 ドラッグモジュレーションを使用すると、ドラッグスカートを解放した後は制御権限がありません。
車両は、大気中に存在する可能性のある予期せぬ密度ポケットやその他の変動の影響を受けやすい[24]。
2 番目の違いは、揚力変調のピーク熱量が 1400 ~ 1800 W/cm2 の範囲にあることです。
空気抵抗調整エアロキャプチャーの場合は 200 ~ 300 W/cm2 と比較します。 結果として生じる総熱負荷は 200 ~ 300 の範囲になります。
揚力調整の場合は kJ/cm2、抗力調整の場合は 40 ~ 75 kJ/cm2。 したがって、低弾道係数システムが使用されています。
抗力調整は、揚力調整と比較して、はるかに穏やかな空気熱環境を提供します [25、26]。
3 番目の違いは、揚力調整の場合、到達速度が速い場合でも、ピーク ヒート レートが十分に範囲内に収まることです。
HEEET のテスト済み限界。 抗力調整の場合、ピークヒートレートはカーボンクロス TPS の上限に近くなります。
約 250 W/cm2 までテストされます。 したがって、リフト変調アーキテクチャは、高い到着速度に対応できます。
これは高エネルギー、短い飛行時間の軌道で発生しますが、抗力変調アーキテクチャはより制限される傾向があります。
カーボンクロス TPS のピーク熱速度の制約による最大到達速度の条件 [27]。
表 1. 天王星の揚力と抗力の調整による航空捕捉の比較。
V. 結論
この研究では、揚力と抗力の調整技術を比較し、氷の巨人に対するそれらの影響を調査しました。
エアロキャプチャー。 揚力変調は抗力変調のほぼ 2 倍のコリドー幅を提供するため、
より大きな配達と大気の不確実性。 揚力変調により飛行中の継続的な制御が可能になり、
実際に発生した密度プロファイルに応じて軌道を調整します。 ドラッグモジュレーションはさらに多くのことを提供します
揚力調整と比較して、エアロキャプチャにとって良好な空気熱条件。 ドラッグモジュレーションではコントロールがありません
ドラッグスカートの放出後には、車両が公称値から外れた密度変動の影響を受けやすくなります。










※コメント投稿者のブログIDはブログ作成者のみに通知されます