








地球近傍小惑星で接触連小惑星の(68346)2001KZ66、YORP効果で連星がくっついたのか?自転速度が上がってラブルパイル構造の小惑星が分離しようとしているのか?これからわかる。以下、機械翻訳。
レーダーと光学観測の組み合わせからの接触連星(68346)2001KZ66に対するYORP効果の検出
YORP効果は、小さな小惑星が経験する小さな熱放射トルクであり、それらの物理的および動的な進化において重要であると考えられています。理論的枠組みの開発を容易にするために、さまざまな小惑星タイプのYORPの測定値を提供することにより、この効果を理解することが重要です。私たちは、これをサポートするために、地球近傍小惑星の選択に関する長期観測研究を行っています。ここでは、(68346)2001 KZ66に焦点を当てます。これについては、10年にわたる光学観測とレーダー観測の両方を取得しました。これにより、小惑星の回転進化の包括的な分析を行うことができました。さらに、アレシボ天文台からのレーダー観測により、詳細な形状モデルを生成することができました。(68346)は逆行性回転子であり、その極は南の日食極の近くにあり、15∘ 経度の半径 170∘ と緯度 −85∘。レーダーから導出された形状モデルを光学光度曲線と組み合わせることにより、利用可能なすべてのデータに適合する洗練されたソリューションを開発しました。これには、(8.43±0.69)×10−8 r a d d a と−2。(68346)は、鋭いネックラインによって小さな非楕円体コンポーネントに結合された大きな楕円体コンポーネントを含む、明確な分岐形状を持っています。この物体は、連星系の穏やかな融合、またはYORPスピンアップによる瓦礫の山の変形のいずれかから形成された可能性があります。形状は、地形変動の最小値に近い安定した構成で存在し、レゴリスがより高い可能性のある領域から移動する可能性は低いです。
キーワード:小惑星、小惑星:個体:(68346)2001 KZ66 –方法:データ分析–方法:観測–技術:測光–技術:レーダー天文学–放射メカニズム:熱

図1.小惑星(68346)2001 KZ66は、2003年から2019年までの期間にわたる光学およびレーダー観測。垂直線
すべてのパネルで、2005年から2010年までの期間の省略を示しています。
2つのパネルは、黄道座標系でのオブジェクトの位置を示しています。
地球から観測された緯度と経度。 下の2つのパネルは小惑星の位相角と地心距離。 光学光度曲線
NTTからのデータは、光度曲線データで塗りつぶされた青い円でマークされています
塗りつぶされた紫色の円でマークされたINTから。 黒い四角は公開された光度曲線データ。 緑の円は、アレシボレーダーデータが
収集されました。 青い実線は、オブジェクトの観測を表しています エフェメリス。

図2.小惑星の自転周期スキャンの結果(68346)2001KZ66はセクションで説明されています。 3.1。 スキャンの結果、自転周期が発生しました
4.9860±0.0001時間で、後で4.985988±0.000020時間に調整されました。

図3.小惑星の凸反転極探索の結果(68346)
2001年KZ66が黄道で記述された天球の表面に投影されました
座標。 青い線は、緯度𝛽 = 0の黄道面を示しています◦
、 その間 追加の緯度の円は黒い線でマークされ、
青い数字。 赤い線は経度を示します𝜆 = 0◦
と緑の線 𝜆 =180◦、選択した子午線が黒い線でマークされ、
赤い数字。 左上から時計回りに、投影は東(E)を示しています。
空の西(W)、南(S)、北(N)の半球。 NS
最小限でも黒から色が変わります𝜒2、1%刻みで最小𝜒2、および𝜒2ですべてのソリューションを表す白い領域
最小値を50%以上上回っています𝜒2。 最高のポールは黄色でマークされています
𝜆 =170◦にある「+」、𝛽 = −85◦、半径15◦の1𝜎エラー。

図4.(68346)2001KZ66の最適な凸形状モデル。 モデル
光度曲線データのみを使用し、一定期間。 ポールは𝜆 =170◦にあります、𝛽 = −85◦。 上段(左から右):体心座標フレームのX、Y、Z軸に沿ったビュー
軸の正の端から。 下の行(左から右):に沿ったビュー負の端からのX、Y、Z軸。 モデルのZ軸が位置合わせされます
回転軸と最大慣性軸を使用します。 凸状の光度曲線 反転モデルはスケーリングされておらず、表示される単位は任意です。

図5.レーダーから導出された小惑星の最終的な形状モデルの適合(68346)
2001 KZ66をレーダーデータに追加(表4のモデルの概要)。 各3つの画像サブパネルは、観測データ(左パネル)、合成エコーで構成されています。
(中央のパネル)、および最適なモデルの空の平面投影(右のパネル)。
データと合成エコー画像では、遅延は下向きに増加し、右側の周波数(ドップラー)。 空の平面の画像は方向付けられています
天体の北(赤道座標)が上に、東が左にあります。
回転ベクトル(体に固定された座標系のZ軸)は次のようにマークされます。
白い矢印。 この一連の画像はアレシボデータに対応しています 2003年10月28日に収集されました。

図6.図5と同じですが、この一連の画像は
2003年10月29日に収集されたアレシボデータ。

図7.小惑星(68346)の連続波(cw)スペクトル観測
2001年10月にアレシボ天文台で観測されたKZ66(詳細表2)に示されている観察結果の説明。 循環的に受け取った
偏波信号は、破線で示されている送信時と同じ円(SC)偏波と、反対の円(OC)偏波の両方で記録されます。
実線で示しています。 小惑星の形の分岐は、これらのcwスペクトル。 右側のパネルで特に目立ちます。

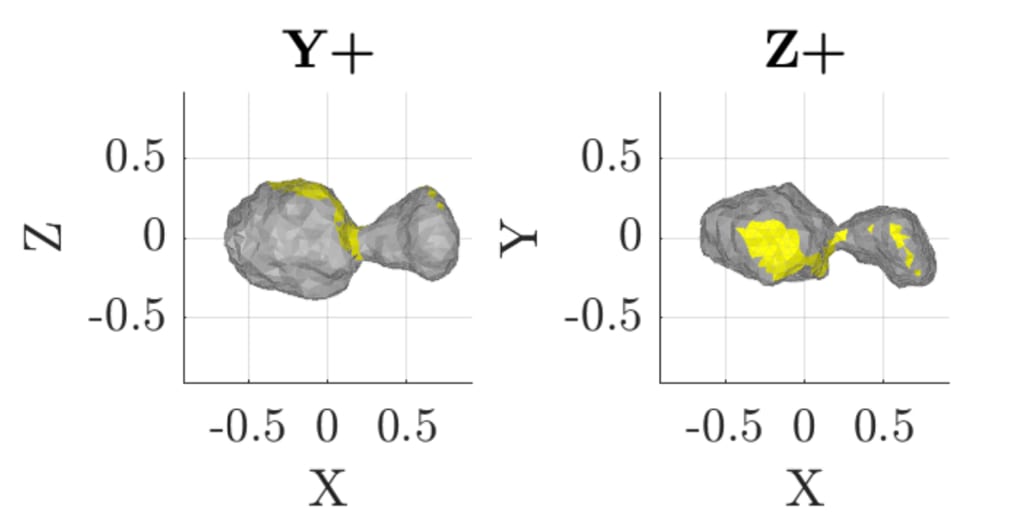
図8.図4と同じですが、(68346)の最適な頂点形状モデル用です。
2001KZ66はレーダーデータから導き出されました。 モデルは、cwスペクトルと遅延ドップラー画像から導出されました。 モデルには固定の極方向が与えられました
凸反転極探索中に決定されます。 黄色のファセットは
70°を超える入射角で見られない、または見られないもの レーダーで
画像。 軸の目盛りはキロメートルで表示されます。 アラインメントの詳細 モデルの体心軸と主軸の間の詳細は、付録の表A1。
6結論
アポロ群の潜在的に危険な小惑星(68346)2001KZ66を監視しています2010年から2019年までの10年間、10個の光学光を取得
曲線。また、2夜のレーダー観測もあります。2003年に撮影されたアレシボ天文台。これらのデータを使用して公開
光学光度曲線は、KZ66のロバストな形状モデルを導き出しました。KZ66は、大きな楕円体を含む明確な分岐形状を持っています
鋭い凹みによって小さな非楕円体に結合されたコンポーネント
湾曲したコンポーネント。 KZ66の進化に役割を果たす可能性のある4つの異なる形成メカニズムについて説明しました-連星系の崩壊、回転変形、その後の再形成
衝突、侵食。 KZ66の幾何アルベドを考慮することで、そのうちの1つを除外することができましたが、ガス放出が発生する可能性はほとんどありません。
私たちが今日見ている形態に責任がありました。安定性
KZ66の形状の変化についても、重力勾配を計算し、地形の変化を調査することで説明しました。 KZ66は現在、最小化された優先状態またはその近くに存在することが判明
レゴリスが移動する可能性が低い地形の変化ポテンシャルエネルギーの高い領域からポテンシャルの低い領域へ。
レーダーから導出された形状モデルを使用して、加速度を検出しましたYORPに起因する可能性のある小惑星の回転速度の。使用する
10年間の光度曲線データ、光度曲線のみの分析の結果
可能な限り幅広いYORPの強みで、(7.7+3.8-13.2)×10^−8rad day^−2。しかし、光学を組み合わせることによってレーダーから導出された形状モデルを使用した光度曲線では、モデルには(8.43±0.69)×10^-8rad day−2のYORP強度が必要でした
エポックで4.985997±0.000042時間の初期回転周期2455290.98269JDはすべてのデータに適合します。この検出は、
YORPの8番目の直接検出。これらはすべて正の加速度です。
のために決定された0.220±0.003のSC / OC分極比アレシボcwスペクトルからのKZ66は、それがNEA集団の典型的な代表であることを示しています。他の接触連星と比較して
形状モデルでは、KZ66の記録値が最も低くなります。これを単純に解釈すると、その表面粗さが
イトカワよりcm-to-mスケールで滑らかですが、関係レーダーの円偏光比と表面粗さの間には最近、より複雑であることが示されました(Lauretta et al.2019)。
KZ66は、穏やかなマージの結果として形成された可能性が最も高いです バイナリシステムの崩壊による両方のコンポーネントの、またはから
引張強度の弱いコアを備えた瓦礫杭の変形YORPのスピンアップによる。のメカニズムとしてガス放出を除外します
オブジェクトの幾何アルベドとして、その独特の形状を生成します
彗星のそれと矛盾している(Lamy et al.2004)。この形状は現在、最小値に近い安定した構成で存在します
レゴリスが移動する可能性が低い地形の変化ポテンシャルエネルギーの高い領域。ただし、これは最終的に変更されます
小惑星はYORPによってさらに加速されます。このオブジェクトの形成に関するさらなる洞察を得ることができます
両方のローブの構成が均一であるかどうかを判断することによって。
ただし、組成の変化を検索するには、より多くのデータが必要です
葉の間。小惑星の球密度のよりロバストな決定は、ヤルコフスキー軌道の測定によって決定できます。
ドリフト(Chesley et al.2003、2014;Hanušetal.2018)。より強い
かさ密度の制約により、さらに狭くすることができます KZ66が地形変動曲線上に存在する領域、小惑星の現在の状態の安定性を確認することができます。
将来的には、熱物理解析を実行して理論的なYORP強度を決定する予定であり、これにより、発見につながる可能性があります。
理論と観察を調和させるための異質性の必要性
値-Lowryらによって使用された方法。 (2014)小惑星イトカワの密度の不均一性を決定する。これは推測に役立ちます
この小惑星が1つまたは複数の物体によって形成されたかどうか。ローブ間の違いを示す別の方法は、検索することです。
小惑星の完全な回転にわたるV-Rカラーバリエーション。と観測された標準星の追加、これらの観測は可能性があります
また、小惑星の絶対等級の正確な値を決定します。これには、文献で報告されている大きな変動があります(DeLeón
etal。 2010;マシエロら。 2017)。または、回転分解
小惑星のスペクトル測定値を取得して決定することができます 各葉の構成。 また、定期的に継続する予定です
KZ66を光学的に監視します。 KZ66の軌道は、オブジェクトが2023年から隔年で観測可能で、定期的に19等級に達します
またはより明るい。 KZ66のこれらの追加の観測は、次の目的で使用できます。
このホワイトペーパーで紹介するYORP検出を改善します。 その間、私たちが開発した形状モデルは、さらに研究するために使用できます
二重小惑星の形成メカニズム。
レーダーと光学観測の組み合わせからの接触連星(68346)2001KZ66に対するYORP効果の検出
YORP効果は、小さな小惑星が経験する小さな熱放射トルクであり、それらの物理的および動的な進化において重要であると考えられています。理論的枠組みの開発を容易にするために、さまざまな小惑星タイプのYORPの測定値を提供することにより、この効果を理解することが重要です。私たちは、これをサポートするために、地球近傍小惑星の選択に関する長期観測研究を行っています。ここでは、(68346)2001 KZ66に焦点を当てます。これについては、10年にわたる光学観測とレーダー観測の両方を取得しました。これにより、小惑星の回転進化の包括的な分析を行うことができました。さらに、アレシボ天文台からのレーダー観測により、詳細な形状モデルを生成することができました。(68346)は逆行性回転子であり、その極は南の日食極の近くにあり、15∘ 経度の半径 170∘ と緯度 −85∘。レーダーから導出された形状モデルを光学光度曲線と組み合わせることにより、利用可能なすべてのデータに適合する洗練されたソリューションを開発しました。これには、(8.43±0.69)×10−8 r a d d a と−2。(68346)は、鋭いネックラインによって小さな非楕円体コンポーネントに結合された大きな楕円体コンポーネントを含む、明確な分岐形状を持っています。この物体は、連星系の穏やかな融合、またはYORPスピンアップによる瓦礫の山の変形のいずれかから形成された可能性があります。形状は、地形変動の最小値に近い安定した構成で存在し、レゴリスがより高い可能性のある領域から移動する可能性は低いです。
キーワード:小惑星、小惑星:個体:(68346)2001 KZ66 –方法:データ分析–方法:観測–技術:測光–技術:レーダー天文学–放射メカニズム:熱
図1.小惑星(68346)2001 KZ66は、2003年から2019年までの期間にわたる光学およびレーダー観測。垂直線
すべてのパネルで、2005年から2010年までの期間の省略を示しています。
2つのパネルは、黄道座標系でのオブジェクトの位置を示しています。
地球から観測された緯度と経度。 下の2つのパネルは小惑星の位相角と地心距離。 光学光度曲線
NTTからのデータは、光度曲線データで塗りつぶされた青い円でマークされています
塗りつぶされた紫色の円でマークされたINTから。 黒い四角は公開された光度曲線データ。 緑の円は、アレシボレーダーデータが
収集されました。 青い実線は、オブジェクトの観測を表しています エフェメリス。
図2.小惑星の自転周期スキャンの結果(68346)2001KZ66はセクションで説明されています。 3.1。 スキャンの結果、自転周期が発生しました
4.9860±0.0001時間で、後で4.985988±0.000020時間に調整されました。
図3.小惑星の凸反転極探索の結果(68346)
2001年KZ66が黄道で記述された天球の表面に投影されました
座標。 青い線は、緯度𝛽 = 0の黄道面を示しています◦
、 その間 追加の緯度の円は黒い線でマークされ、
青い数字。 赤い線は経度を示します𝜆 = 0◦
と緑の線 𝜆 =180◦、選択した子午線が黒い線でマークされ、
赤い数字。 左上から時計回りに、投影は東(E)を示しています。
空の西(W)、南(S)、北(N)の半球。 NS
最小限でも黒から色が変わります𝜒2、1%刻みで最小𝜒2、および𝜒2ですべてのソリューションを表す白い領域
最小値を50%以上上回っています𝜒2。 最高のポールは黄色でマークされています
𝜆 =170◦にある「+」、𝛽 = −85◦、半径15◦の1𝜎エラー。
図4.(68346)2001KZ66の最適な凸形状モデル。 モデル
光度曲線データのみを使用し、一定期間。 ポールは𝜆 =170◦にあります、𝛽 = −85◦。 上段(左から右):体心座標フレームのX、Y、Z軸に沿ったビュー
軸の正の端から。 下の行(左から右):に沿ったビュー負の端からのX、Y、Z軸。 モデルのZ軸が位置合わせされます
回転軸と最大慣性軸を使用します。 凸状の光度曲線 反転モデルはスケーリングされておらず、表示される単位は任意です。
図5.レーダーから導出された小惑星の最終的な形状モデルの適合(68346)
2001 KZ66をレーダーデータに追加(表4のモデルの概要)。 各3つの画像サブパネルは、観測データ(左パネル)、合成エコーで構成されています。
(中央のパネル)、および最適なモデルの空の平面投影(右のパネル)。
データと合成エコー画像では、遅延は下向きに増加し、右側の周波数(ドップラー)。 空の平面の画像は方向付けられています
天体の北(赤道座標)が上に、東が左にあります。
回転ベクトル(体に固定された座標系のZ軸)は次のようにマークされます。
白い矢印。 この一連の画像はアレシボデータに対応しています 2003年10月28日に収集されました。
図6.図5と同じですが、この一連の画像は
2003年10月29日に収集されたアレシボデータ。
図7.小惑星(68346)の連続波(cw)スペクトル観測
2001年10月にアレシボ天文台で観測されたKZ66(詳細表2)に示されている観察結果の説明。 循環的に受け取った
偏波信号は、破線で示されている送信時と同じ円(SC)偏波と、反対の円(OC)偏波の両方で記録されます。
実線で示しています。 小惑星の形の分岐は、これらのcwスペクトル。 右側のパネルで特に目立ちます。
図8.図4と同じですが、(68346)の最適な頂点形状モデル用です。
2001KZ66はレーダーデータから導き出されました。 モデルは、cwスペクトルと遅延ドップラー画像から導出されました。 モデルには固定の極方向が与えられました
凸反転極探索中に決定されます。 黄色のファセットは
70°を超える入射角で見られない、または見られないもの レーダーで
画像。 軸の目盛りはキロメートルで表示されます。 アラインメントの詳細 モデルの体心軸と主軸の間の詳細は、付録の表A1。
6結論
アポロ群の潜在的に危険な小惑星(68346)2001KZ66を監視しています2010年から2019年までの10年間、10個の光学光を取得
曲線。また、2夜のレーダー観測もあります。2003年に撮影されたアレシボ天文台。これらのデータを使用して公開
光学光度曲線は、KZ66のロバストな形状モデルを導き出しました。KZ66は、大きな楕円体を含む明確な分岐形状を持っています
鋭い凹みによって小さな非楕円体に結合されたコンポーネント
湾曲したコンポーネント。 KZ66の進化に役割を果たす可能性のある4つの異なる形成メカニズムについて説明しました-連星系の崩壊、回転変形、その後の再形成
衝突、侵食。 KZ66の幾何アルベドを考慮することで、そのうちの1つを除外することができましたが、ガス放出が発生する可能性はほとんどありません。
私たちが今日見ている形態に責任がありました。安定性
KZ66の形状の変化についても、重力勾配を計算し、地形の変化を調査することで説明しました。 KZ66は現在、最小化された優先状態またはその近くに存在することが判明
レゴリスが移動する可能性が低い地形の変化ポテンシャルエネルギーの高い領域からポテンシャルの低い領域へ。
レーダーから導出された形状モデルを使用して、加速度を検出しましたYORPに起因する可能性のある小惑星の回転速度の。使用する
10年間の光度曲線データ、光度曲線のみの分析の結果
可能な限り幅広いYORPの強みで、(7.7+3.8-13.2)×10^−8rad day^−2。しかし、光学を組み合わせることによってレーダーから導出された形状モデルを使用した光度曲線では、モデルには(8.43±0.69)×10^-8rad day−2のYORP強度が必要でした
エポックで4.985997±0.000042時間の初期回転周期2455290.98269JDはすべてのデータに適合します。この検出は、
YORPの8番目の直接検出。これらはすべて正の加速度です。
のために決定された0.220±0.003のSC / OC分極比アレシボcwスペクトルからのKZ66は、それがNEA集団の典型的な代表であることを示しています。他の接触連星と比較して
形状モデルでは、KZ66の記録値が最も低くなります。これを単純に解釈すると、その表面粗さが
イトカワよりcm-to-mスケールで滑らかですが、関係レーダーの円偏光比と表面粗さの間には最近、より複雑であることが示されました(Lauretta et al.2019)。
KZ66は、穏やかなマージの結果として形成された可能性が最も高いです バイナリシステムの崩壊による両方のコンポーネントの、またはから
引張強度の弱いコアを備えた瓦礫杭の変形YORPのスピンアップによる。のメカニズムとしてガス放出を除外します
オブジェクトの幾何アルベドとして、その独特の形状を生成します
彗星のそれと矛盾している(Lamy et al.2004)。この形状は現在、最小値に近い安定した構成で存在します
レゴリスが移動する可能性が低い地形の変化ポテンシャルエネルギーの高い領域。ただし、これは最終的に変更されます
小惑星はYORPによってさらに加速されます。このオブジェクトの形成に関するさらなる洞察を得ることができます
両方のローブの構成が均一であるかどうかを判断することによって。
ただし、組成の変化を検索するには、より多くのデータが必要です
葉の間。小惑星の球密度のよりロバストな決定は、ヤルコフスキー軌道の測定によって決定できます。
ドリフト(Chesley et al.2003、2014;Hanušetal.2018)。より強い
かさ密度の制約により、さらに狭くすることができます KZ66が地形変動曲線上に存在する領域、小惑星の現在の状態の安定性を確認することができます。
将来的には、熱物理解析を実行して理論的なYORP強度を決定する予定であり、これにより、発見につながる可能性があります。
理論と観察を調和させるための異質性の必要性
値-Lowryらによって使用された方法。 (2014)小惑星イトカワの密度の不均一性を決定する。これは推測に役立ちます
この小惑星が1つまたは複数の物体によって形成されたかどうか。ローブ間の違いを示す別の方法は、検索することです。
小惑星の完全な回転にわたるV-Rカラーバリエーション。と観測された標準星の追加、これらの観測は可能性があります
また、小惑星の絶対等級の正確な値を決定します。これには、文献で報告されている大きな変動があります(DeLeón
etal。 2010;マシエロら。 2017)。または、回転分解
小惑星のスペクトル測定値を取得して決定することができます 各葉の構成。 また、定期的に継続する予定です
KZ66を光学的に監視します。 KZ66の軌道は、オブジェクトが2023年から隔年で観測可能で、定期的に19等級に達します
またはより明るい。 KZ66のこれらの追加の観測は、次の目的で使用できます。
このホワイトペーパーで紹介するYORP検出を改善します。 その間、私たちが開発した形状モデルは、さらに研究するために使用できます
二重小惑星の形成メカニズム。










※コメント投稿者のブログIDはブログ作成者のみに通知されます