









系外惑星の直接撮影を行うために中心恒星の光を遮蔽するスターシェードと宇宙望遠鏡が編隊飛行する必要がある。間隔±125㎞は余裕でしょうが、軸±1mは難しい。
ソーラーセイルみたいなスターシェードと円筒形の宇宙望遠鏡では太陽輻射圧の影響が違い過ぎる。観測する方向によって調整に時間がかかりそうだ。以下、機械翻訳。
スターシェード形成飛行I:光学センシング
(2020年1月28日に提出)
スターシェードの重要な課題は、編隊飛行です。太陽系外惑星のイメージングを成功させるには、望遠鏡のボアサイトとスターシェードを数万キロメートルの間隔で約1 mに合わせる必要があります。この課題には2つの部分があります。まず、望遠鏡に対するスターシェードの相対位置を検出する必要があります。第二に、センサー測定値を制御法則と組み合わせて、重力やその他の外乱の存在下で2つの宇宙船を整列させなければなりません。この作業では、2.4 mの望遠鏡で瞳孔撮像カメラを使用して、1秒で数センチメートルの相対宇宙船方位を測定できる光学センシングアプローチを提示します。
キーワード:高コントラストイメージング、編隊飛行、スターシェード、太陽系外惑星。
図1編隊飛行問題の概要 望遠鏡とスターシェードの間の2〜8万kmの位置半径1 m、長さ250 kmの円柱で維持する必要があります。 ラジアルコントロールは発射で構成されます
スターシェードのスラスタは、重力に対抗するために1 mのデッドバンド内で弾道軌道を実行します10〜20 µm / s2の加速度。
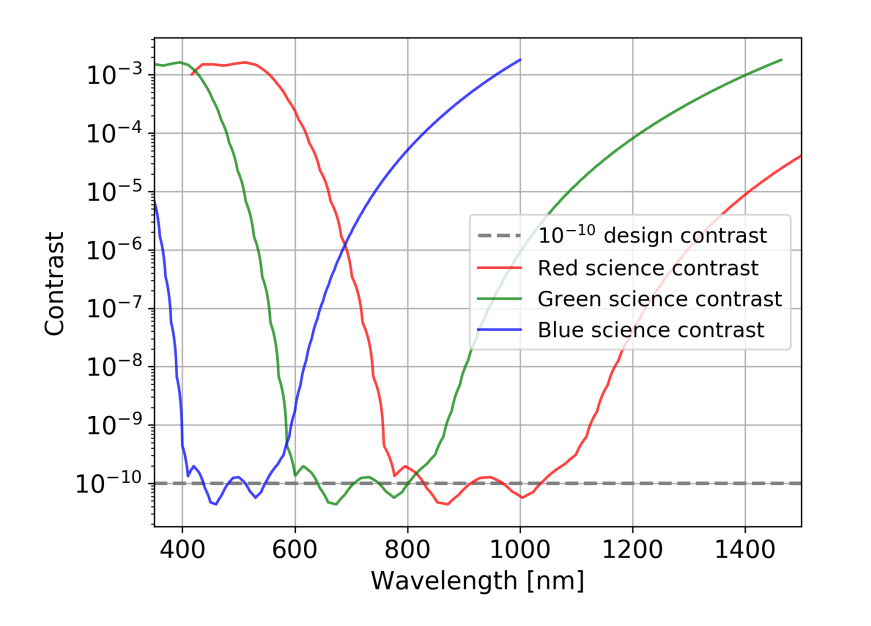
図2赤、緑、青の科学に対するスターシェード抑制のプロットバンド。

図3(左)望遠鏡の瞳孔での帯域外の光パターンの20x20メートルの画像。詳細を示すために引き伸ばされています。 A
同じスケールでの望遠鏡の瞳孔の透明な画像がオーバーレイされます。 (中央)望遠鏡のシミュレーション画像
中心からわずかにずれたアラゴのスポットを示す内部瞳孔カメラ。 (右)ノイズの多い瞳孔画像が比較されます
既知のせん断オフセットを持つ事前計算された画像のライブラリに対して、最適な一致は相対的なせん断に対応します
スターシェードと望遠鏡、この場合はせん断オフセット(0.0、0.6)
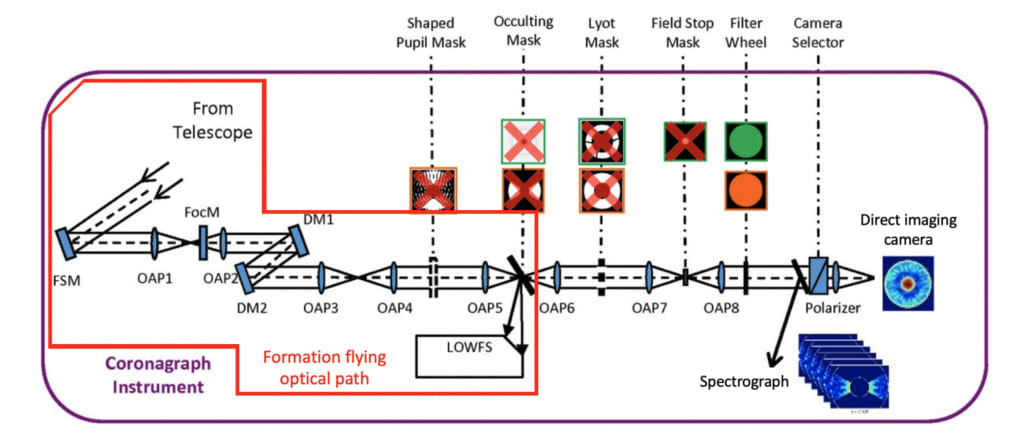
図4 WFIRSTコロナグラフの編隊飛行経路、低次までのすべての光学系を使用
波面センサー。 赤い×は、スターシェード操作のためにビームから外れた光学系を指します。 唐から適応した図等。 2017
5。結論
2つの宇宙船を距離1メートルの精度で位置合わせする必要がある、スターシェード形成飛行の挑戦的なタスクに適した横方向の検知方式を提示しました。
20,000〜80,000 km。 センシングスキームは、古典的な「アラゴスポット」の位置を測定します
望遠鏡の内部瞳孔センサーを使用して、星の縁の周りで回折する光。
この光は、科学的に関心のある波長の外にあり、堅牢な
検知信号。 このセンシング方式の精度は、星のせん断でわずか数センチメートルです。
8〜10 Vの明るさ。予想されるターゲット星のいずれよりも10倍以上暗い。 このセンサーの性能は、分析と比較した場合、良好な一致を示しています
計算、詳細な数値シミュレーション、および実験室実験。望遠鏡の瞳孔イメージャを超えてこのセンサーを実装するために追加のハードウェアは必要ありません。これは、使用されているWFIRSTコロナグラフ装置の場合にすでに存在しています。
Zernikeスポットと連携する内部波面センサーとして。将来のミッションの場合
mDot、22 HabEx、23またはLUVOIR、24のような瞳孔センサーも存在すると予想されます。など、
将来のスターシェードランデブーミッションの宿泊施設をサポートできます。
コンパニオンペーパー(Flinois et al。、準備中)4では、
スターシェードと望遠鏡を必要な1メートルに揃えるのに十分な忠実度を簡単に提供する
太陽系外惑星のイメージング用。このような制御方式には、高レベルの効率と能力があります
最小の中断で、L2の微分重力でほぼ最適な軌道を実行する
軌道修正操作のための科学操作で。そのため、私たちは、スターシェード、編隊飛行問題を解決することができます。
ソーラーセイルみたいなスターシェードと円筒形の宇宙望遠鏡では太陽輻射圧の影響が違い過ぎる。観測する方向によって調整に時間がかかりそうだ。以下、機械翻訳。
スターシェード形成飛行I:光学センシング
(2020年1月28日に提出)
スターシェードの重要な課題は、編隊飛行です。太陽系外惑星のイメージングを成功させるには、望遠鏡のボアサイトとスターシェードを数万キロメートルの間隔で約1 mに合わせる必要があります。この課題には2つの部分があります。まず、望遠鏡に対するスターシェードの相対位置を検出する必要があります。第二に、センサー測定値を制御法則と組み合わせて、重力やその他の外乱の存在下で2つの宇宙船を整列させなければなりません。この作業では、2.4 mの望遠鏡で瞳孔撮像カメラを使用して、1秒で数センチメートルの相対宇宙船方位を測定できる光学センシングアプローチを提示します。
キーワード:高コントラストイメージング、編隊飛行、スターシェード、太陽系外惑星。
図1編隊飛行問題の概要 望遠鏡とスターシェードの間の2〜8万kmの位置半径1 m、長さ250 kmの円柱で維持する必要があります。 ラジアルコントロールは発射で構成されます
スターシェードのスラスタは、重力に対抗するために1 mのデッドバンド内で弾道軌道を実行します10〜20 µm / s2の加速度。
図2赤、緑、青の科学に対するスターシェード抑制のプロットバンド。
図3(左)望遠鏡の瞳孔での帯域外の光パターンの20x20メートルの画像。詳細を示すために引き伸ばされています。 A
同じスケールでの望遠鏡の瞳孔の透明な画像がオーバーレイされます。 (中央)望遠鏡のシミュレーション画像
中心からわずかにずれたアラゴのスポットを示す内部瞳孔カメラ。 (右)ノイズの多い瞳孔画像が比較されます
既知のせん断オフセットを持つ事前計算された画像のライブラリに対して、最適な一致は相対的なせん断に対応します
スターシェードと望遠鏡、この場合はせん断オフセット(0.0、0.6)
図4 WFIRSTコロナグラフの編隊飛行経路、低次までのすべての光学系を使用
波面センサー。 赤い×は、スターシェード操作のためにビームから外れた光学系を指します。 唐から適応した図等。 2017
5。結論
2つの宇宙船を距離1メートルの精度で位置合わせする必要がある、スターシェード形成飛行の挑戦的なタスクに適した横方向の検知方式を提示しました。
20,000〜80,000 km。 センシングスキームは、古典的な「アラゴスポット」の位置を測定します
望遠鏡の内部瞳孔センサーを使用して、星の縁の周りで回折する光。
この光は、科学的に関心のある波長の外にあり、堅牢な
検知信号。 このセンシング方式の精度は、星のせん断でわずか数センチメートルです。
8〜10 Vの明るさ。予想されるターゲット星のいずれよりも10倍以上暗い。 このセンサーの性能は、分析と比較した場合、良好な一致を示しています
計算、詳細な数値シミュレーション、および実験室実験。望遠鏡の瞳孔イメージャを超えてこのセンサーを実装するために追加のハードウェアは必要ありません。これは、使用されているWFIRSTコロナグラフ装置の場合にすでに存在しています。
Zernikeスポットと連携する内部波面センサーとして。将来のミッションの場合
mDot、22 HabEx、23またはLUVOIR、24のような瞳孔センサーも存在すると予想されます。など、
将来のスターシェードランデブーミッションの宿泊施設をサポートできます。
コンパニオンペーパー(Flinois et al。、準備中)4では、
スターシェードと望遠鏡を必要な1メートルに揃えるのに十分な忠実度を簡単に提供する
太陽系外惑星のイメージング用。このような制御方式には、高レベルの効率と能力があります
最小の中断で、L2の微分重力でほぼ最適な軌道を実行する
軌道修正操作のための科学操作で。そのため、私たちは、スターシェード、編隊飛行問題を解決することができます。










※コメント投稿者のブログIDはブログ作成者のみに通知されます