








GPSがない宇宙で探査機の位置を正確に把握するには電波源をVLBI(超長基線電波干渉法)で観測して逆算して地上局からの距離を出す方式ですか?以下、機械翻訳。
木星氷衛星探査ミッションの運用コンポーネントとしての惑星電波干渉計およびドップラー実験
要約
本稿では、ESA の木星氷衛星探査機 (JUICE) ミッションの科学的構成要素としての惑星電波干渉計およびドップラー測定実験 (PRIDE) 電波天文学観測、および他の将来的な惑星および宇宙科学ミッションのための運用およびエンジニアリング インターフェイスの概要を示します。本稿では、自然電波源の観測と並行して特定の宇宙船の観測スケジュールを作成できるようにする高度なスケジューリングおよび計画方法について説明します。これを実践し、JUICE ミッションの PRIDE に適した自然背景較正源を見つけるために、計画およびスケジューリング ソフトウェアを開発しました。自然天体電波源用の従来のスケジューリング ソフトウェアは、必要な制御ファイルに宇宙船を観測対象として含めるように設定されていません。そのため、観測計画の段階ですでに困難が生じています。本稿では、衛星のスケジューリングと計画のために天体物理学および測地 VLBI で使用される新しいルーチンの開発と既存のルーチンの適応について報告します。 PRIDE 科学観測の分析により、観測計画が改善され、システム エンジニアリング アプローチを使用してミッションのスケジュール方法論が研究されました。さらに、さまざまな周波数帯域にわたって較正電波源を選択するためのチャートの検索などの新しい手順と、科学運用計画に対するそれらの戦略の結果を強調しました。Tudat ソフトウェアに基づく、JUICE 宇宙船の巡航フェーズ中の金星フライバイのシミュレーションも紹介されており、PRIDE 技術をテストし、PRIDE 観測可能物が自然天体の天体暦にもたらす改善を評価する有望な機会となっています。JUICE と同様の無線通信システムを採用している VLBI ネットワークの電波望遠鏡による ESA の BepiColombo の最初の K aバンド (32 GHz) 観測もテスト ケースとして実証されました。これらの活動の主な目的は、今後の PRIDE JUICE 運用の練習となることです。他の宇宙ミッションの計画およびスケジュール ソフトウェアの機能を紹介します。
キーワード:干渉法、VLBI、惑星探査ミッション、宇宙科学ミッション、電波天文学、JUICE、PRIDE
1 導入
超長基線電波干渉法(VLBI)は、1960年代に天体物理学研究を主な目的として、天体電波源の研究における角度分解能を高めるために開発された電波天文学技術である[1、第1章]。この方法は非常に強力で多用途であることが判明したため、天体測定や測地学から天文学や宇宙科学の他の分野への応用が急速に進みました[1、第12章]から基礎物理学[例、2、フォーム+2009ApJ]、太陽物理学と惑星間物質の研究[3、4、5]と深宇宙航行。後者の宇宙船が観測目標とするVLBIの応用については、[6]太陽系内の宇宙船のVLBI観測のほとんどの場合、ターゲットまでの距離はいわゆるフラウンホーファー基準[7この場合は近傍場VLBI観測という用語を使うのが適切です。
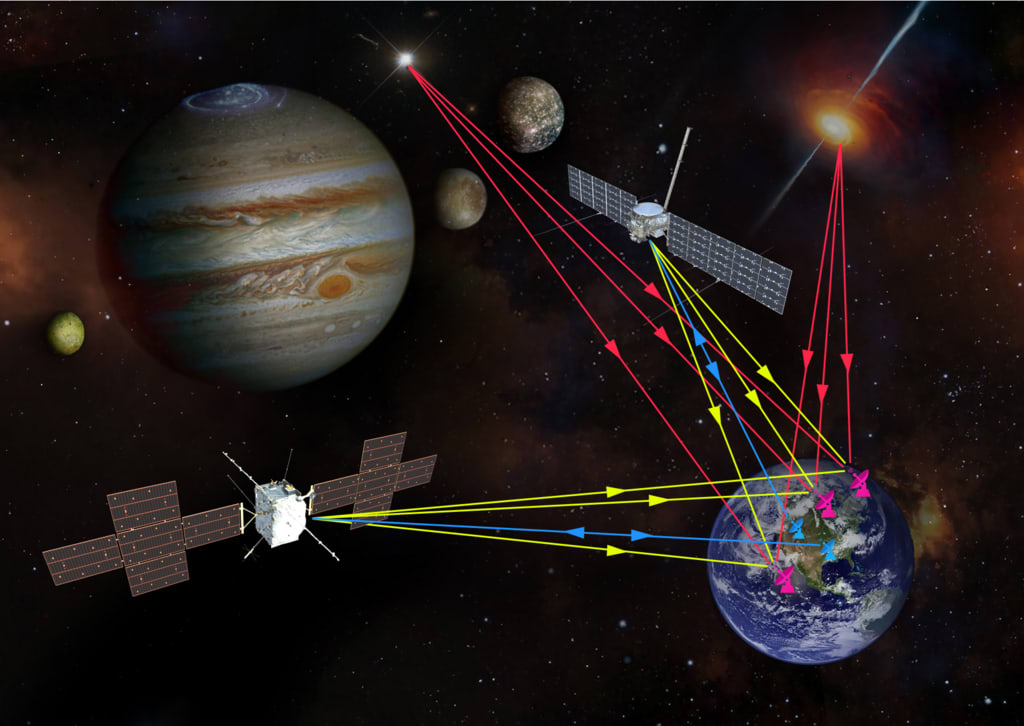
図1:木星探査ミッション JUICE (左下の宇宙船) とエウロパ クリッパー (右上の宇宙船) をサポートする PRIDE の概略構成 (縮尺は正確ではありません)。宇宙船は、ミッション固有の地球ベースの追跡ステーション (青い地球ベースのアンテナ) と双方向の無線交信 (青い矢印) を行っています。地球ベースの VLBI 電波望遠鏡 (マゼンタ色の地球ベースのアンテナ 3 つ) は、宇宙船からの無線信号 (黄色の矢印) と遠方の自然天体電波源 (赤い矢印) の放射を受信します。この構成は、X バンドおよび/または K aバンド (それぞれ 8.4 GHz および/または 32 GHz) で動作できます。
惑星電波干渉計とドップラー実験[PRIDE、8、6]は、従来の天文 VLBI 用に開発されたデータ記録および処理技術を活用していますが、ターゲット ソースは宇宙船です (図 1を参照)。PRIDE の主な測定対象は、宇宙船の横方向の天体位置と視線速度です。前者は VLBI 位相参照によって提供され、後者は宇宙船キャリア トーンのドップラー シフトを推定することによって提供されます。PRIDE の方法論については、[6、9、10]、および対応するソフトウェア実装[11] PRIDEは、欧州宇宙機関(ESA)によって木星氷衛星探査機[JUICE、 12、13、14、15、16、およびSpace Science Reviews 2023–2024の特別号、およびその中の参考文献]は、ESAのCosmic Vision 2015––2025の大型フラッグシップ科学ミッションの初となるもので、2023年4月14日に打ち上げられました。JUICEは木星とガリレオ衛星、特にガニメデの調査を行うほか、カリストとエウロパなどの他の衛星の調査も行います。このミッションの科学的焦点の1つは、これらの氷の世界の潜在的な居住可能性です。
木星の現地調査は1970年代にNASAのパイオニア計画から始まった[17]、ボイジャー計画[18、19]、ガリレオ計画に引き継がれた[20、21] 1995年から2003年にかけて実施されたNASAのジュノーミッション[22]は2016年7月から木星系を探査している。その目的は、木星の核と磁場、木星の大気の組成、木星のオーロラの徹底的な研究である。NASAのエウロパ・クリッパー・ミッション[23、24]は 2024 年に打ち上げられ、2030 年から JUICE と合流して木星系の同時現地調査を行う予定です。ジュノー、JUICE、エウロパ クリッパーのミッションは相乗効果が高く、木星とその系に対する理解を大幅に深めることになります。
JUICEミッションにおけるPRIDEの主な科学的目的は、木星系の暦の改善を支援することである[25、26、27]は、ガリレオ衛星の起源、進化、居住可能性に関する研究の科学的成果を高めることになる。PRIDE-JUICEの科学目標の詳細な説明は[6]。
表1:世界の VLBI アレイ。アレイ内の望遠鏡の数と X バンドおよび K aバンドの能力は目安であり、増加する傾向にあります。望遠鏡の中には、複数のアレイに所属しているものもあります。[6詳細は[]をご覧ください。
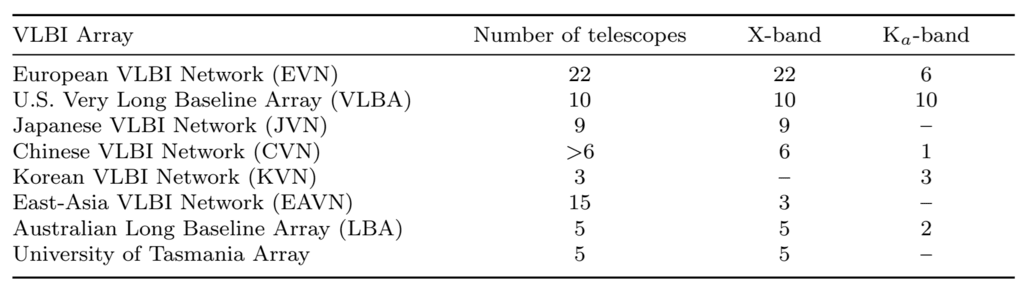
典型的な PRIDE セッションでは、地上の電波望遠鏡のネットワークが位相参照 VLBI モードで JUICE 宇宙船を観測します。PRIDE には専用の搭載機器はなく、ミッションの無線通信システムに依存しています。PRIDE の主な機器資産は、VLBI を備えた電波望遠鏡、データ転送、およびデータ処理施設の世界規模のネットワークです。特定の PRIDE 観測実行では、地球ベースの電波望遠鏡の組み合わせは、図 2 に示され、2024年3月現在の表1にリストされている ように、世界中に分散した大規模な施設のセットから構成されます。ほとんどの場合、VLBI 望遠鏡は、銀河系および銀河系外天文学、天体測定学、測地学のために構築および運用されており、JUICE やその他の宇宙科学ミッションとは直接関係ありません。PRIDE はこれらのリソースをアドホックな体制で使用します。PRIDE 観測に関与する望遠鏡は、宇宙船から送信された無線信号を受信します。 PRIDE-JUICEでは、Xバンド(8.4GHz)での観測が基本ですが、K aバンド(32GHz)での観測も可能です。
VLBI技術が惑星科学と探査の分野に登場したのは半世紀以上前です。VLBIが支援する惑星および宇宙科学ミッションのレビューについては、[6]ほとんどの場合、惑星探査機のVLBI観測は、ミッションの名目上の科学スイートの一部ではなく、アドホックな補足として実施されました(例:ESAのタイタンホイヘンス探査機[28、29]、カッシーニ宇宙船のVLBA観測[30])。比較的まれなケースでは、VLBI 追跡がミッションの科学的運用の名目上の構成要素として含まれていた。これは、VEGA ミッションの金星気球や、ジョット・ハレー彗星のランデブーへの支援の場合である[31、32、33]中国の月探査計画(嫦娥[34])と火星(天文[35])には、公称状態ベクトル決定およびナビゲーション技術としてVLBI追跡が含まれています。日本の月探査機SELENE [36]と金星太陽帆イカロス[37]も VLBI サポートに依存していました。ただし、これらすべての例では、VLBI 追跡は比較的短いミッション期間にわたって利用されました。
PRIDEとして実施されたJUICEミッションのVLBIコンポーネントは、運用期間が上記の先行機とは異なり、巡航フェーズが8.5年、木星周回が少なくとも3年です。また、これは、太陽系外へのミッションに名目上のコンポーネントとしてPRIDE-VLBIが含まれる初めての機会です。惑星ミッションのVLBI追跡の方法論は、過去20年間にPRIDEグループによって開発され、実証されてきました[6、およびその中の参考文献によると、JUICEミッションの名目上の構成要素としてのVLBI運用の負荷が高いため、グローバルVLBIネットワークを使用した大規模な観測キャンペーンを計画および実施するための新しいアプローチが必要でした。これらの地上VLBI運用は、同様に洗練されているが根本的に異なるJUICE惑星ミッションの運用ルーチンと適切に統合される必要があります。本稿では、このインターフェースと、木星系に到着した後の高運用負荷に備えるための開発について紹介し、地上VLBIネットワークとJUICEミッションの一貫した運用ルーチンの例を示す。

図2:VLBI電波望遠鏡の世界分布(黄色の点で表示)。表示されている望遠鏡のほとんどはXバンド(8.4GHz)で動作し、一部はK aバンド(32GHz)で動作します。後者のいくつかは、X/K a同時観測を行うことができます。この地図は、2024年3月時点の状況を反映しています。JUICEミッションの運用期間中に、より多くのVLBI対応電波望遠鏡がオンラインになると、この地図は変更される可能性があります。クレジット:背景の地図は、Blue Marble Next Generationによって提供された衛星画像合成であり、NASA Visible Earth(%\cmtsf{(SF:␣maybe␣worth␣updating␣to␣the␣actual␣submission␣date)}.https://visibleearth.nasa.gov)の厚意により提供されています。
この論文は、次のように構成されています。第2章では、PRIDE の構成と JUICE との相互作用、および科学的要件と他の機器との連携方法について説明しています。第3章では、実験の計画とスケジュールの方法について詳しく説明します。ここでは、これがデータ品質に影響を与えるさまざまな理由について説明し、巡航段階でこれが JUICE ミッションに影響を与えるさまざまな機会について概説します。第4章では、計画とスケジュールを自動化するために開発された特定のツールを紹介し、BepiColombo 宇宙船による最初の PRIDE Kaバンド観測でのこれらのツールの適用と結果を示し、これらのツールが金星フライバイ実験中の PRIDE 観測からの科学的成果に与え得る潜在的な影響を定量化するための数値シミュレーションを提供します。最後に、第5章で結論と展望を示します。
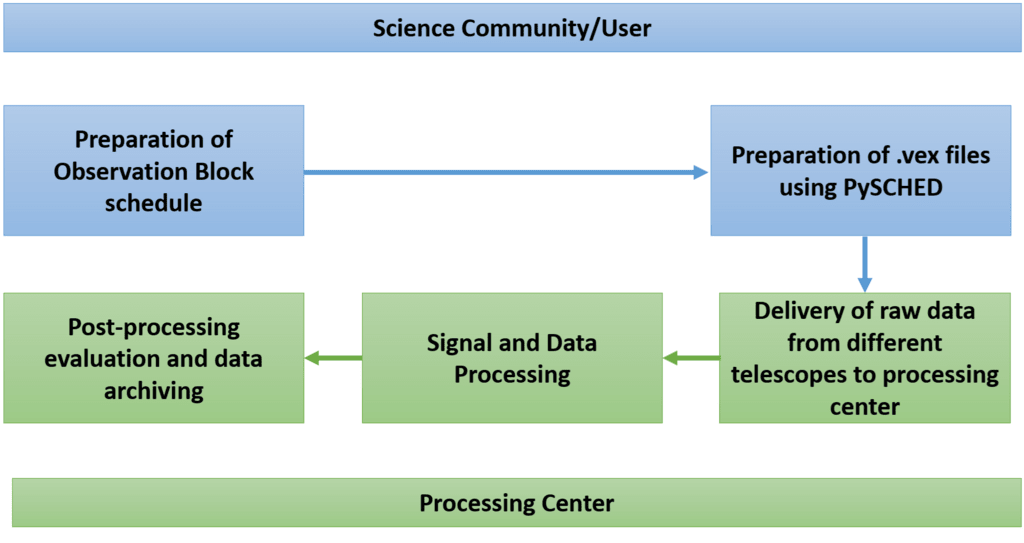
図3:PRIDE VLBI 観測実行アクティビティとデータ処理。主な手順には、観測ブロックのスケジュール設定、.vex ファイルの準備、各望遠鏡のキャリブレーション データとベースバンド データの収集が含まれます。PI にリリースされる最終的な可視性データは、キャリブレーション データとバンドルされています。近距離または遠距離 VLBI の場合、信号処理には遅延モデルのほか、パルサー処理、スペース VLBI アンテナ サポート、広域 VLBI の複数の位相中心、スペクトル ウィンドウ、カスタマイズされたチャネル化などのオプションの処理を含めることができます。データの確認と EVN または惑星データ システム (PDS) 標準へのアーカイブ化は、最後の手順です。
2 PRIDE–JUICE の基本構成、要件、実装
2023年4月14日、JUICEはフランス領ギアナのクールーにあるギアナ宇宙センターからアリアン5 ECA(進化型極低温モデルA)ロケットを使用して打ち上げられました[38]。このミッションは3つのフェーズ、すなわち巡航フェーズ、2031年7月に木星周回軌道投入(JOI)で始まる木星ツアー、そして2034年12月にガニメデ周回軌道投入(GOI)で始まり、名目上は2035年9月に終了するガニメデフェーズから構成される。最新のミッションの統合ミッション分析報告書(CReMA)5.0b23によると[39]、JUICEは2034年にガニメデの極軌道に入る前に、ガニメデ、カリスト、エウロパの多数のフライバイ調査を実施する。JOIまでの約8年間にわたる巡航フェーズでは、2024年8月に月と地球のフライバイ、2025年8月に金星のフライバイ、2026年9月と2029年1月にそれぞれ2回の地球フライバイが行われる予定。科学的な可能性として、1つ以上の小惑星のフライバイが調査されている[40]。
セクション2.1では、 PRIDE が観測値を生成するために使用する信号である JUICE 無線システムについて概要を説明し、セクション2.2では PRIDE-JUICE の科学的目的と運用について簡単に説明します。
2.1 JUICEラジオシステム
宇宙船の通信サブシステムは、アップリンクに X バンド、ダウンリンクに X バンドと K aバンドを使用する冗長化された深宇宙トランスポンダー (DST) セットで構成されています。科学ペイロードには、搭載された無線科学機器 3GM [木星とガリレオ衛星の重力と地球物理学;41このトランスポンダにより、Kaバンドのアップリンクとダウンリンクを使用して、高精度の無線科学ドップラーおよび距離データを生成することができます。宇宙船のアンテナは、固定式高利得アンテナ (HGA) (デュアルバンド X および Ka )、可動式中利得アンテナ (MGA) (デュアルバンド X および Ka )、および 2 つの固定式 X バンド低利得アンテナ (LGA) で構成されています。巡航中は、X バンドのアップリンクとダウンリンクがデフォルト設定です。
JUICE ミッションは、ミッション運用センター (MOC) と科学運用センター (SOC) で構成される ESA 地上セグメントによって運用されます。MOC は地上セグメントの開発と宇宙船の運用を担当し、SOC は科学運用要求の調整、準備、MOC への送信、および MOC から取得したデータの配信の調整を担当します。PRIDE 地上セグメントは、宇宙船が通信または無線科学用の無線信号を発信するたびに観測を行うことができます。宇宙船には、他の目的 (ナビゲーションや通信など) のために PRIDE に必要なオンボード無線機器がすでに搭載されているため、PRIDE はミッションのペイロード質量予算に影響を与えません。
2.2 PRIDE–JUICE 科学目標と運営
PRIDEの科学的目標のほとんどは、PRIDE [8]と 3GM [413GMは、ベピコロンボの水星探査機電波科学実験(MORE)実験(3GMと非常によく似ている)のために開発された手順に従って、高精度の距離測定とドップラー測定を提供します。42]。PRIDE は、3GM が専用の追跡局で取得したドップラー データに加えて、各受信電波望遠鏡でドップラー推定値を提供します。PRIDE は、原理的には JUICE からのあらゆる無線信号で動作できますが、追跡の一般的な動作モードでは、ESTRACK 局のアップリンクからのコヒーレント ダウンリンクを使用します。JUICE 無線信号が X バンドだけでなく Ka バンドでもトランスポンディングされると (利用可能な場合は、X バンドと Ka バンドを組み合わせたアップリンクから)、PRIDE 測定のノイズ パラメータが強化されます。これにより、荷電粒子によるノイズの較正が可能になります。このデュアル周波数動作は、3GM Ka バンド トランスポンダー (KaT) によって実現されます。PRIDE の運用上の利点は、複数の地上受信アンテナを使用できることです。これにより、最良の天候、電離層条件、および JUICE のより高い高度を地元の地平線上で受信できる可能性が高くなります ( [43])。JUICE電波科学実験全体におけるPRIDEの役割に関する詳細な議論については、[6さらに、ここで議論されているトピックにとって最も重要なことは、PRIDE が国際天体基準座標系[ICRF ;44]。
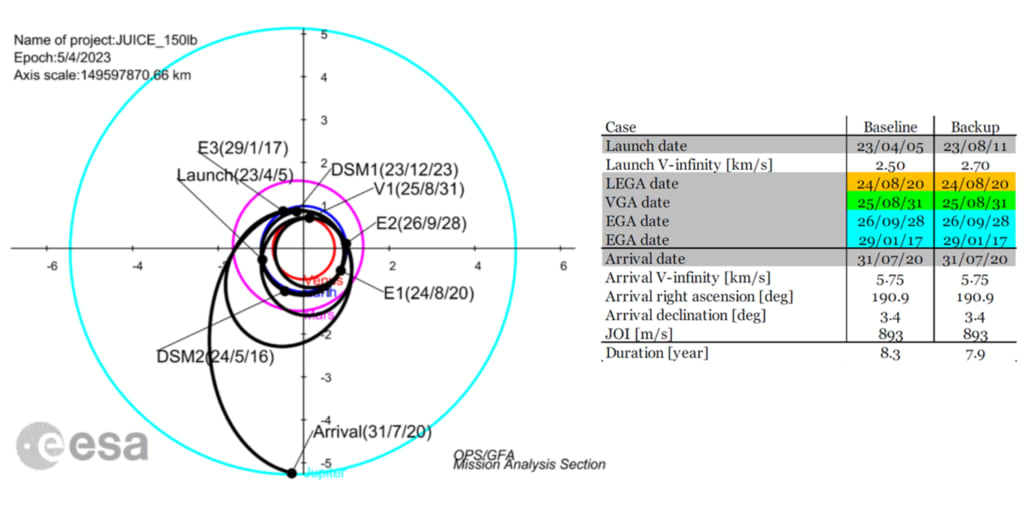
図4:2023年の打ち上げに向けた惑星間巡航段階と転送オプションの概要。色分けは、緑は金星重力アシスト(VGA)、青は地球重力アシスト(EGA)、オレンジは月地球重力アシスト(LEGA)です。[39] JUICE の打ち上げは、この図のベースライン計画よりも 1 週間強早く行われたことに注意してください。これは、ここに示す一般的な軌道計画には影響しません。
PRIDE VLBI測定は、木星の通常の位置(面外方向)とガリレオ衛星の計算を改善することが期待されています。特にカリスト[25、45さらに、PRIDE VLBIデータは、エフェメリス解の独立した検証として貴重であり、JUICE探査機、ガリレオ衛星、および木星自体の完全に結合した動的解を開発する上で大きな価値を持つでしょう[26、46]他の手段との相乗効果の完全な概要については、[6]。PRIDEは、宇宙船のダイナミクスを決定することで抽出された科学データ製品に加えて、過去にPRIDEを使用して金星で行われたように、ガリレオ衛星と木星の大気の探査として電波掩蔽実験を実行するために使用されます[43]。 PRIDE に関係する電波望遠鏡の収集エリアは、通常の単一追跡ステーションの観測と比較して非常に広く、また PRIDE の地球規模の性質によって観測ジオメトリや現地の気象条件がより多様化するため、より質の高い掩蔽測定が可能になります。 PRIDE 信号検出に複数のステーションを使用すると、地球の大気による伝播エラーが減り、空間解像度とジオメトリ精度が向上し、全体的な信号強度が向上し、ノイズが最小限に抑えられます。これにより信号対雑音比 (SNR) が向上し、より高品質の観測が保証され、掩蔽中に宇宙船からの微弱な信号を検出するのに不可欠です。[43]は、PRIDE ステーションを利用した Venus Express (VEX) による掩蔽は、専用の Deep Space Network (DSN) や ESTRACK 施設で行われた掩蔽に比べて、金星の大気圏へのより深い侵入を達成できることを実証しました。PRIDE は、[47]。
PRIDE の地上セグメントの運用は、地上の電波望遠鏡が PRIDE 観測を実施できるかどうかにのみ依存します。後者は、望遠鏡と宇宙船の幾何学的構成、ミッションの無線リンク スケジュール、および無線信号の種類 (搬送波/変調スペクトル) によって定義されます。簡単に言えば、PRIDE の実装では、PRIDE の主要な地上資産と JUICE ミッションとのやり取り中に、既存の技術をピギーバック アプリケーションとしてのみ使用します。ただし、惑星探査機の通常の無線科学と比較すると、PRIDE 観測の計画には、VLBI データから得られるすべての科学成果の品質が、観測中の利用可能な位相較正器と (時間によって変化する) 可視ステーション ネットワークの品質に依存するという複雑さが加わります。これらはすべて、PRIDE によって生成される JUICE の角度位置の品質に影響します。これらの複雑さは「通常の」無線科学観測には存在しないため、その影響についてはあまり詳しく研究されていません。これらの追加された複雑さを自動化し、(可能な場合は)最適化したいという要望が、ここで紹介する作業の必要性の主な動機となっています。
表2:巡航段階のフライバイの概要[39]。
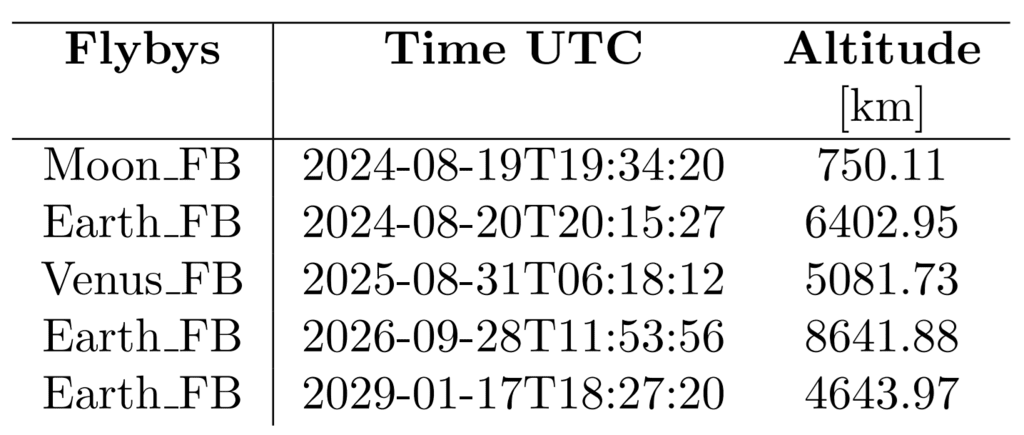
表3:クルーズフェーズ中のPRIDE観測の種類。各実験の期間は≥2 h。

3 PRIDE–JUICE の計画とスケジュール
このセクションでは、さまざまなミッション フェーズでの PRIDE 実験の計画とスケジュール方法の概要、および巡航フェーズでのそれらの適用の概要を示します。現在の文脈では、「計画」という用語は、観測をいつ行うかを決定する一般的な全体的な手順に使用され、「スケジュール」という用語は、使用する地上局、周波数、位相較正器などを決定するより詳細な手順に使用されていることに注意してください。PRIDE 観測を実施する前に、宇宙船の送信ウィンドウ、近くの較正器による (インビーム) 位相参照の機会、地上局の可用性など、多くの基準を考慮する必要があります。観測の計画は、これらの考慮事項によって大きく影響されます。このセクションでは、PRIDE 観測のスケジュール、計画、および準備の手順について説明します。
まず、計画とスケジュールが PRIDE VLBI データの品質に与える影響について、セクション 3.1で説明します。計画とスケジュールの運用手順の基本的な説明は、セクション 3.2で提供します。巡航フェーズの PRIDE 運用については、セクション 3.3で説明し、方法論的検証のための実験が科学的目的にも適用される機会を強調します。特に、木星系での拡張 PRIDE 運用のミッションへの貢献を最大化するための準備として、これらの実験からの科学的成果を向上させるために、計画とスケジュールのツールをどのように使用できるかについて説明します。
3.1 データ品質への影響
VLBIデータから得られるPRIDE科学成果の品質は、近くの位相較正源の観測に依存している[48]は、ICRF で位置が明確に定義されているクエーサーであることが多い。宇宙船と較正器の両方を同じ空の領域から観測して、電離層と対流圏による大気干渉と機器の位相誤差を除去する必要がある。較正器がターゲットから離れすぎると、大気の変化によりこれらの影響を補正することが不可能になる。通常、較正器がターゲットから遠すぎる場合、
〜2∘[43]をターゲットに近づけば、キャリブレーションを実行できます。ただし、望遠鏡をターゲットとキャリブレーターの間で頻繁に前後に操作する必要があり、この手順はノッディングと呼ばれます。適切な参照ソースが利用可能で、適切な計画とスケジュールが立てられている場合は、ビーム内位相参照を使用してキャリブレーションを改善できます。この手法では、参照ソースをターゲット ソースと同じ望遠鏡のプライマリ ビーム内で観測するため、ノッディングが不要になり、データの品質が向上します。
JUICE の VLBI データ ポイントの精度と正確さは、位相基準源の品質と近さに依存します。特定の科学的関心期間中に JUICE に近い適切な位相基準源が利用できない場合は、関心のある空の領域内の適切な基準源のカタログを特に密にするために、専用の観測キャンペーンを実施できます。ただし、このようなキャンペーンは、宇宙船の VLBI 観測とは別に、そのかなり前に実行する必要があります。また、そうすることの最終的な科学的根拠が妥当な場合にのみ行う必要があります。このような準備的な VLBI 実験の例は、 JUICE の金星フライバイの場合について、セクション4.3で説明されています。
PRIDE 技術は、2 機以上の送信衛星からの信号を同時に受信するためにも適用でき、複数の衛星によるインビーム VLBI 観測に使用でき、ICRF における 2 機の衛星の相対角度位置を通常の VLBI 観測値と同等の精度で決定できます。JUICE のコンテキストでは、これは JUICE と NASA の Europa Clipper の同時インビーム PRIDE 観測を実施するユニークな機会を提供し、2 つのミッションのデータ セットからガリレオ衛星の一貫した結合された動的ソリューションを作成するという潜在的に大きな利点があります[46] . エクソマーズ微量ガス探査機の使用[49]と マーズ・エクスプレス[50]、このような二重宇宙船PRIDE実験の予備研究が[51] が火星軌道上にいる。マーズ・エクスプレスと天問1号の同時追跡における伝播効果の比較は、 [52機会があれば、巡航期間中に2機目の宇宙船が見えるPRIDE観測キャンペーンが計画される。
〜2∘木星系での運用に備えてJUICEを開発中。
3.2 運用手順
PRIDE 観測実行の全体的かつ通常のアクティビティを図3に示します 。この図は、どの電波望遠鏡がどの宇宙船をいつ観測するかなど、PRIDE 観測がどのように計画されているかを示しています。観測は、カスタムビルドの計画ソフトウェアを使用して計画されます。スケジューリングは、SCHED または最近では pySCHED 1と呼ばれる VLBI 専用ソフトウェアによって実行されます。スケジューリング ソフトウェアへの入力は、開発された計画ツールの結果と、宇宙船の座標を計算し、さまざまな必要なスケジューリング パラメータを追加するためのアドホック スクリプト2から作成されます。各アンテナの感度、アンテナの取り付け、スルー レート、およびソースの強度を考慮したソースの可視性の正確な計算は、スケジューリング ツールの重要なコンポーネントです。出力は、参加する各電波望遠鏡がデータを取得するために使用する標準形式のスケジュールです。アンテナ ステアリング、シグナル チェーン、サンプラー (デジタイザー) 構成、および記録モードはすべて、ステーション固有のスケジュール ファイルに含まれており、これもスケジューリング プロセスで定義されます。
VLBI電波望遠鏡で宇宙船の信号を観測するには、アップリンクとダウンリンクのセッション、UT範囲、さまざまなエポックでの宇宙船の予測位置を含む適切なタイムスケジュールが必要です。これらの入力は、SOCおよび/またはMOCから事前に予測され、追跡セッション情報とCReMAドキュメントに従って、観測前に準備する必要があります[39]。観測計画とスケジュールが立てられた後、参加する各地上局は、定められた形式で生データをJIVEに送信する。[9、11]を使用して、この時間領域受信データを分析します。最後に、ミッションの後処理とアーカイブ化は、惑星データシステム (PDS) アーカイブ ガイドラインに従って実行されます。
3.3 巡航フェーズ中のミッションシナリオとPRIDE運用

図5:PRIDE 計画およびスケジュール ツールのソフトウェア アーキテクチャ。オレンジ色のブロックで示されるソフトウェアの最初のセクションは入力セクションとして使用され、ユーザー入力、Spice カーネル、および無線基本カタログ (RFC) で構成されます。プログラムの 2 番目のセクションには、特別に作成された Python モジュール、Spicepy ラッパー、および宇宙船の軌道を計算する Astropy (水色) が含まれます。モルワイデ投影を使用したファインディング チャートと拡大されたプロット (図 7に示すようなもの) は、このソフトウェアの 3 番目のセクションと出力セクション (緑色) を使用して生成されます。
ここで説明する実験構成は、地球近傍ミッションフェーズ(NECP)の終了から木星周回軌道投入(JOI)の実行の6か月前まで続くJUICE惑星間転送フェーズ(ITP)/巡航フェーズに基づいています。[40、39] がこのケーススタディの基礎であり、図 4に示されています。ITP 期間中の惑星フライバイ イベントの包括的なリストは表 2に示されています。CReMA [39]バージョン 5.0b23。
前のセクションで概説した PRIDE データ処理パイプラインと方法論は、木星系での科学的活動に備えて、特に自動化とデータ分析手順の改善とテストを行うために、ミッションの巡航フェーズ中に「ライブ」テストで実行されます。これらの実験は主にテストと較正の目的で実行されますが、これらのセッション中に取得された PRIDE データは、表 3にリストされているいくつかの科学的アプリケーションにも使用できます。
ESA の深宇宙ステーション ESTRACK は、主にナビゲーションの目的で、惑星間フェーズ全体にわたって宇宙船の追跡を行うために使用されます。PRIDE は、ITP フェーズと通常フェーズ中に、MOC の標準的な毎週の軌道決定セッションの一部と並行して観測 (PRIDE-EXP1、表 3 ) を実行します。PRIDE は、テスト目的で毎年 4 ~ 6 回の宇宙船観測セッションを実施します。
PRIDEは金星フライバイ(PRIDE-EXP2、表 3)に近い観測を計画している。巡航フェーズ全体の中で、金星フライバイはPRIDEにとって最も科学的に興味深い状況、すなわちガリレオ衛星のフライバイに最も近い。金星フライバイ中は、熱条件(特に天底指向がない)のために宇宙船の制約が高く、ペイロードの運用に厳しい制限が課されることになる[39]フライバイ中(またはフライバイの直前)にMGAがオンになっている場合、フライバイ中のトレーニング実験では、金星のエフェメリスを改善するためのVLBIデータも提供されます。その結果、このデータにより、宇宙船の軌道決定やフライバイターゲットの法線点の推定に至るまでのデータ分析チェーンをテストすることもできます。[26] 。第4.4節では、例として、金星フライバイ中のPRIDE観測の数値シミュレーションの結果をまとめ、VLBIデータの品質、ひいては実験の適切なスケジュールと準備が科学的成果に与える潜在的な影響を定量化し、強調しています。
金星フライバイ中に取得されたVLBIデータに加えて、金星への進入と退出中に取得されたドップラーデータは、金星の大気の掩蔽研究に役立つだろう(PRIDE-EXP3、表 3)。Venus Expressを使用したこのようなデータセットの分析は、 [43]は、電波掩蔽測定における PRIDE の使用と、特に金星での可能性に関する詳細なモデルを提供しました。金星の大気により、金星での掩蔽測定はガリレオ衛星で取得できるものとは根本的に異なりますが、金星の掩蔽データは木星大気の PRIDE 掩蔽に備えるための有用なトレーニング データになる可能性があります。月フライバイ中に PRIDE ドップラー データを取得できれば、ガリレオ衛星での後の観測のための電波掩蔽やバイスタティック レーダー研究のより代表的なテスト ケースとして使用できます。
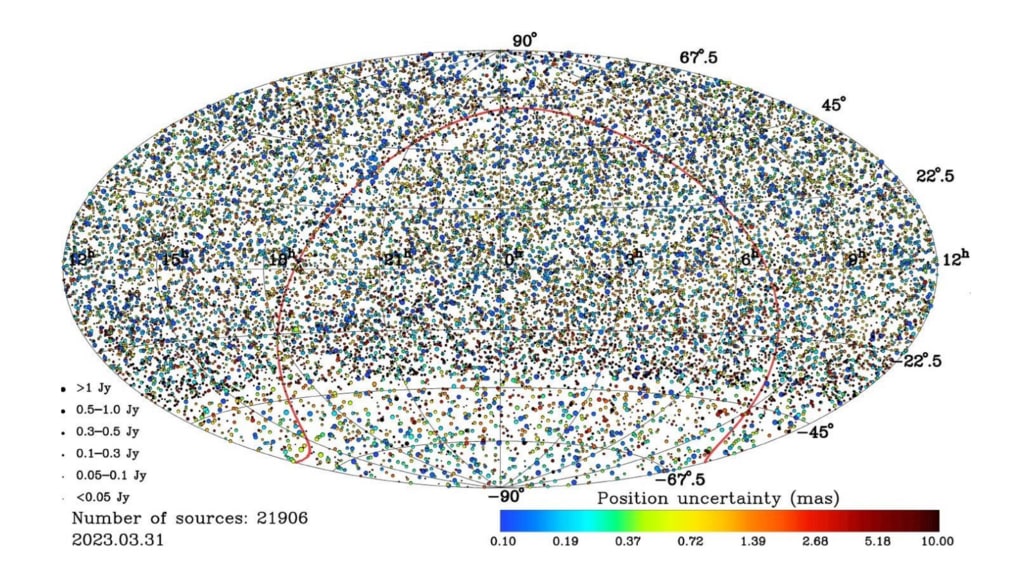
図6:RFCカタログの合計21,906個のコンパクト電波源の天空分布[53]。
可能であれば、インビームモードで取得されたトレーニングデータセット(PRIDE-EXP4、表 3)が取得されます。ここでは、JUICEと2番目の宇宙船からの信号を同時に追跡する観測と、JUICEと位相較正器からの信号を同時に観測する(たとえば、ノッディングなし)観測の2種類の観測を区別します。「2番目の宇宙船とのインビーム」モードは、JUICEとエウロパクリッパーの同時観測に先立ってPRIDEの運用およびデータ分析システムをテストおよび最適化するのに最も役立ちます[46]。このような観測の機会が生まれるかどうかはまだ明らかではない(例えば、2番目の宇宙船が適切な位置に存在するかどうか)ため、PRIDEチームによる専用の分析のテーマとなる。さらに、適切なインビーム位相キャリブレータが利用できる「通常の」トレーニングセッション(EXP1)中の機会は、インビーム観測のスケジュールとデータ分析手順に利用される。
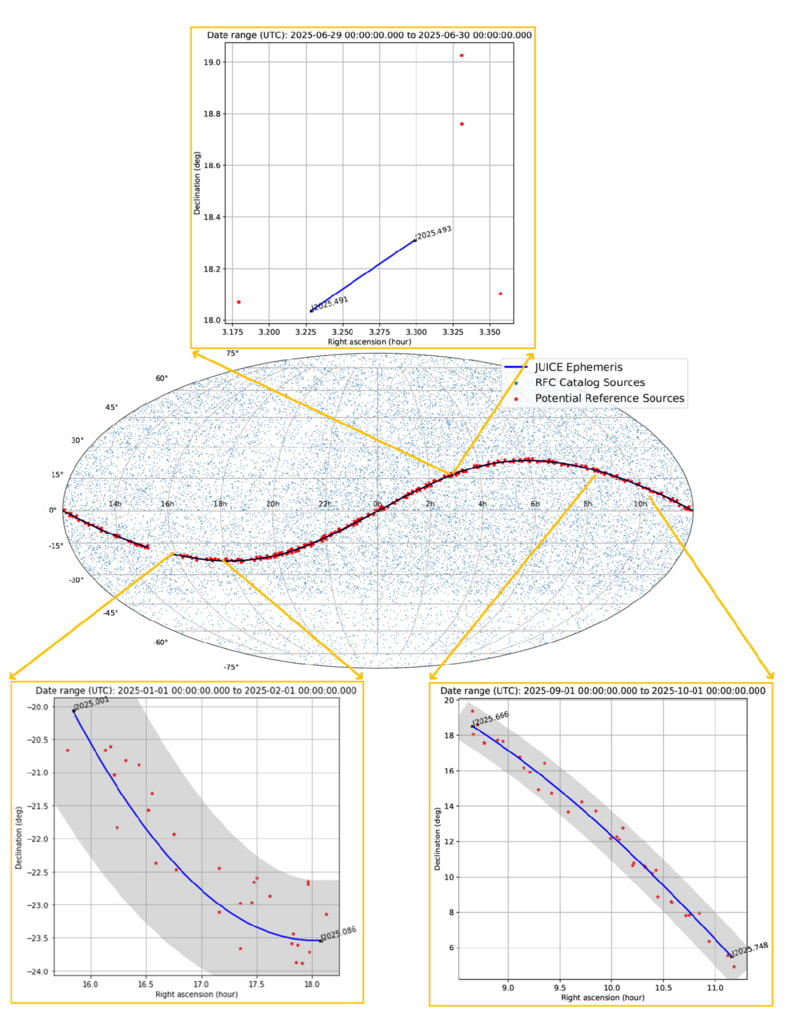
図7:JUICEミッション(CReMA 5.0)の巡航フェーズにおける2025.01.01から2025.12.31までの期間のPRIDE観測計画図。中央のパネルは、RFC天体源(青い点)が埋め込まれたモルワイデ図法の全天を示しています。上部と下部の2つのパネル(オレンジ色の枠で囲まれている)は、それぞれ1日と1か月の期間の拡大されたファインディングチャートを示しています。赤い点は、RFCからの潜在的な参照源を示しています[53]内にある
1∘JUICE探査機のエフェメリス。青い線はCReMA 5.0に基づくJUICEの天体軌道を示す。影の部分は、
1∘JUICE 天体軌道から。一般に、較正装置は JUICE 宇宙船の天空軌道に沿って均一に分布しています。
最後に、惑星間プラズマシンチレーション(IPS)[54、47]宇宙船の電波信号が太陽風プラズマに与える影響は、すべての巡航段階のテストデータセットを使用して正確に評価されます。このような観測は、2010年にESAの金星エクスプレス[47]、ロゼッタに引き継がれ、現在に至るまで数多くの ESA/NASA ミッション[11]。過去 10 年間で、多数の VLBI 電波望遠鏡を使用して数千回のセッションが実施されました。さらに、コロナ質量放出 (CME) を含む太陽活動を監視する観測キャンペーンが開始されました。これは、これらのイベントが宇宙船と地上アンテナの間を通過し、JUICE 通信システムがアクティブになっているときに無線観測を開始することによって行われます。巡航フェーズで JUICE が送信する信号が、最新の観測を補完することが期待されます。
上記の目的に加えて、PRIDE は、例外または不測の事態として、PRIDE チームと SOC が共同で確立した特別なプロトコルに基づいて、急な観測を行うこともできます。緊急にデータ収集が必要で、通常の観測計画アプローチが不十分な場合、これらの観測モードがアクティブになります。この不測の事態に対する運用モードは、PRIDE の最も重要な運用資産の一部である地上の電波望遠鏡が極めて感度が高く、経度の範囲全体に地理的に分散しているという事実に基づいています。PRIDE は、この運用モードで単一アンテナ (ドップラー測定を含む信号検出) または VLBI 観測を行うことができます。例外的な状況では、前者は約 24 時間の通知で実行できます。
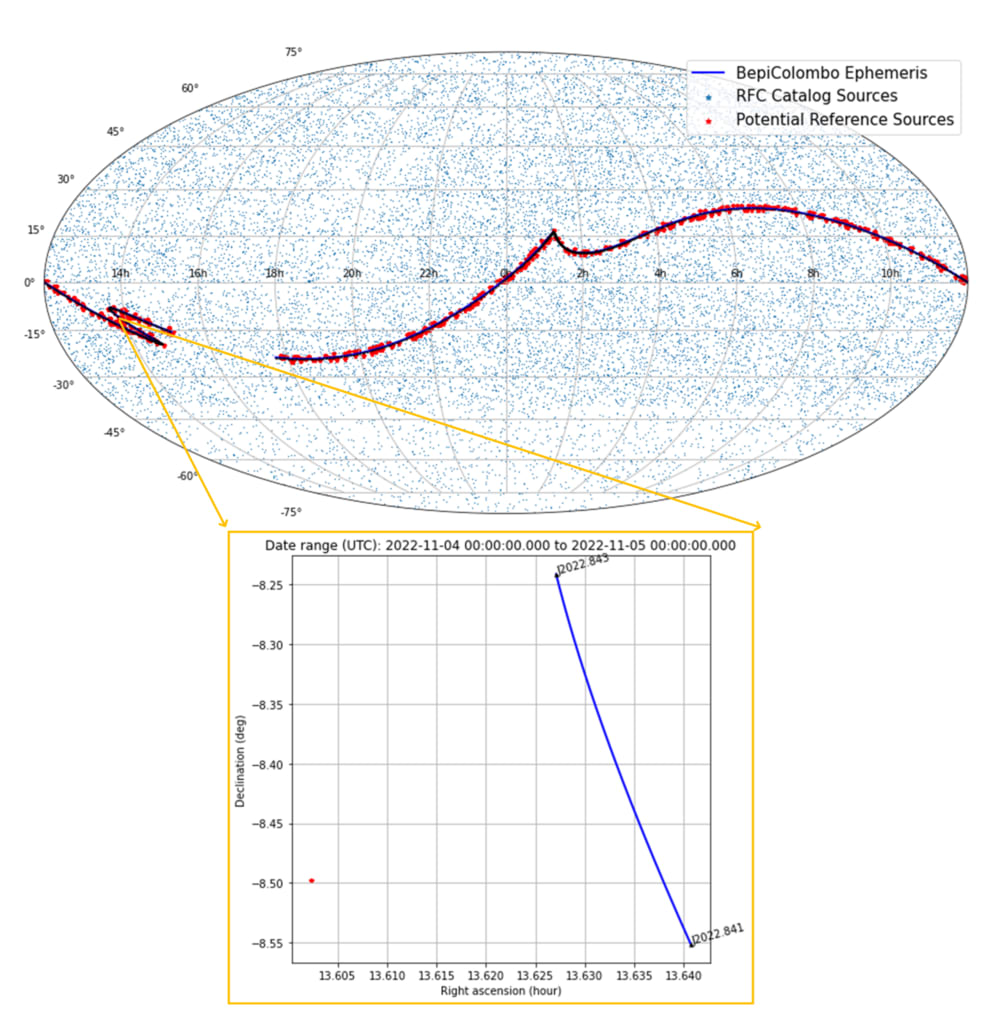
図8:2022年1月1日から2022年12月31日までのBepiColombo-PRIDE計画チャート。上のパネルは、RFC天体源(青い点)が埋め込まれたモルワイデ投影の全天を示しています。下のパネル(オレンジ色の枠)は、1日間の拡大された発見チャートを示しています。赤い点は、RFCからの潜在的な参照源を示しています。
1∘ベピコロンボ宇宙船の天体暦。青い線はベピコロンボの天体軌道と、考えられる参照元を示しています。
4 現在および将来の観測への応用
セクション3.1で説明したように 、PRIDE 実装プロセスの最初のステップでは、ミッションの全体的な科学運用計画に従って、個別のミッションフェーズで科学の機会を特定します。このセクションでは、計画とスケジュールをサポートするために開発したツールを紹介し、過去と今後の実験の例示的な結果を示します。カスタム開発された観測計画ツールの詳細、主に特定の時代における宇宙船の天体位置近くの潜在的な位相参照キャリブレーターの特定については、セクション 4.1で説明します。セクション 4.2では、PRIDE 観測計画およびスケジュール ツールの BepiColombo ミッションへの適用について説明します。これは、PRIDE チームによる K aバンドでの宇宙船信号の最初の取得を表し、K aバンドでの PRIDE の概念的な実現可能性を実証しました。 2025 年の JUICE 金星フライバイの前に、較正源の特性評価と、潜在的に適切なインビーム位相基準較正源を探すための準備 VLBI 実験の計画については、セクション 4.3で説明します。最後に、セクション 4.4では、VLBI データの取得とエフェメリスの改善のための最初のエンドツーエンドテストである金星フライバイ (セクション3.3と4.3を参照)中に PRIDE-JUICE の効果的な計画とスケジュール設定、およびさまざまな位相較正源の適切な選択が重要であることを強調する数値シミュレーションの結果を示します 。
4.1 計画およびスケジュールツール
マーズ・エクスプレスやビーナス・エクスプレスなどの過去の惑星探査ミッションでの PRIDE 実験では、必要な観測計画、スケジュール、および関連する交換ファイルを綿密に準備するために、多数の手作業が必要でした。VLBI 宇宙船観測の場合の問題は、広く使用されている測地スケジュール システムが通常、宇宙船を電波源としてサポートしていないことでした。さらに、宇宙船のミッションは動的であり、受信望遠鏡間だけでなく送信局と宇宙船間のスケジュールと調整も必要なため、観測のスケジュール手順にはさらに多くの困難が伴います。宇宙船の軌道と視程、宇宙船の運用上の制約、リアルタイム調整の柔軟性、複数の観測モードの調整、基線長の分布、およびデータの優先順位付けは、宇宙船の VLBI 観測をスケジュールする際の主な課題です。
これらの課題に対処し、プロセスを可能な限り効率化するために、私たちは専用の宇宙船観測計画およびスケジュール モジュールを作成しました。これにより、ユーザーからの必要最小限の入力だけで、今後の実験のための現実的な衛星観測計画を簡単かつ実用的に作成できます。図 5は、PRIDE 計画およびスケジュール プログラムのソフトウェア スタックを示しています。
• L0 (入力): このモジュールには、開始日と終了日、参照フレーム、参照カタログ、SPICE メタカーネル、時間ステップなどの実験のすべての入力が含まれます。
• L1: このモジュールでは、宇宙船の軌道に基づいて潜在的な参照源を識別および分類します。このモジュールは、Spicepy [を使用してJUICE軌道を計算します。55](SPICEツールキット用のPythonラッパー[56])からVLBI RFC座標を抽出し、Astropy [57]。
• L2 (出力): 関心のある特定の実験に対して、モルワイデ投影による検出チャートの形式での視覚化と、特定のイベントのズームイン チャートが生成されます。
[無線基本カタログ (RFC)53] は、現在、潜在的な校正者の探索に利用できるコンパクト電波源の最も完全なカタログです。RFC は、絶対天体測定および測地学プログラム、およびその他の VLBI 研究で生成された利用可能なすべての VLBI データを分析して作成され、数千のコンパクト電波源のミリ秒角精度の位置、地図、相関フラックス密度の推定値を提供します。これには、1980 年から 2023 年の間に VLBI で検出された合計 21,906 のソース (図 6 ) が含まれています。
ツールの最初のステップは、図7に示すような、地球から見た対象宇宙船 (JUICE) の座標を一定期間にわたって表示する、いわゆるファインディング チャートを作成する ことです。弱い天体を観測したり、天体測定研究を実施したりするためには、位相参照キャリブレータ ソースが必要です。これらのソースはコンパクトで、すべてのベースラインで強い信号 (0.3 Jy 以上) を持ち、正確な位相キャリブレーションを保証する必要があります。これには、地上に適切なステーションがあり、空に分布する安定した電波源がわかっていることが不可欠です。2 番目のステップでは、宇宙船のエフェメリスを中心とした空の明確な検索ストリップを作成し、この検索ストリップ内で電波源を検索します。これらのソースはすべて、将来の PRIDE 実験キャリブレータとして使用でき、キャリブレータの適切な選択は VLBI データの品質に影響します。図 7は、JUICE ミッションの巡航フェーズ中の CReMA 5.0 の PRIDE 観測計画チャートを示しています。これらの結果は、ビーム内位相参照観測の事例を検出するために利用される[43] の可能性、または一般的には PRIDE を観察する機会です。
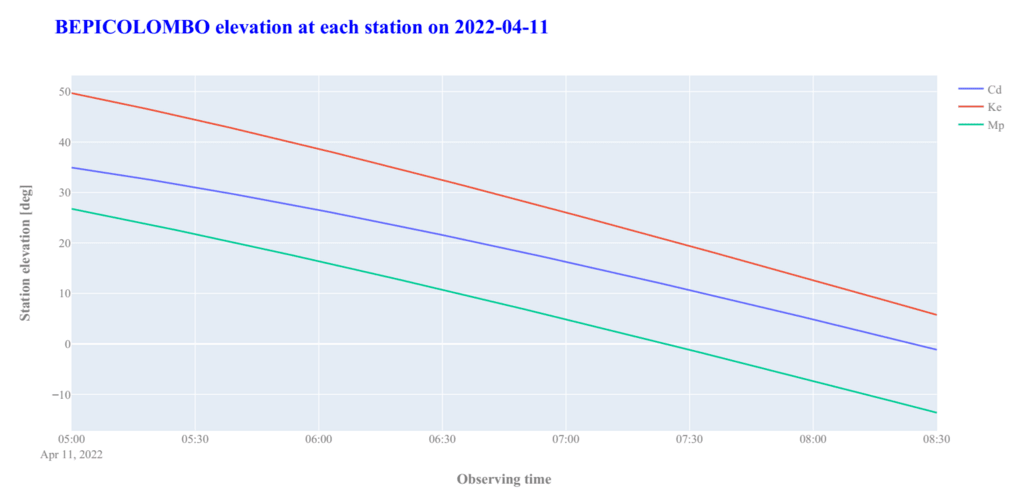
図9:3 つの望遠鏡の高度可視性。UTC に対する高度を表示 (望遠鏡ごとの稼働時間)。位相参照 VLBI セクションに参加した望遠鏡の観測期間 (UTC)。緑、青、赤の色はそれぞれオーストラリアの観測所、モプラ (Mp)、セドゥナ (Cd)、キャサリン (Ke) を表します。
PRIDE JUICEプロジェクトは、特にKaバンド(32GHz)におけるこれらの較正源の黄道面密度に大きく依存しています。現在、図6 に示す位相較正源の現在のリストによると、黄道面に沿ったこれらの源の密度は、高精度のVLBI宇宙船追跡には不十分です [53木星系に到着する前に、探査機の横方向の位置決めをナノラジアン未満の精度で行うために、木星の軌道の周りに校正源の密なグリッドを作成するための専用の観測キャンペーンを実施します。
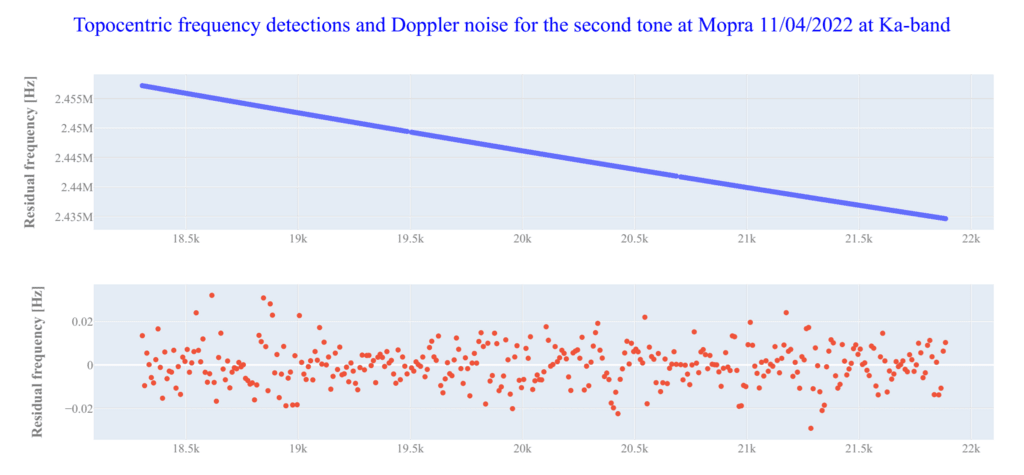
図10:2022年 4月 11日にモプラで検出された Kaバンドでの地心周波数検出とドップラーノイズ。これは、参照ソースと交互に行われた 20 分間のスキャン 3 回です。横軸は時間を表し、2022年 4月 11日の始業からの秒単位で測定されます。この軸は、モプラ施設で実施された観測の継続時間を示します。この軸に沿った各ポイントは、観測中の特定の瞬間に対応します。縦軸は、Kaバンドで検出された周波数 (kHz) を表します。この周波数軸は、ドップラー効果とノイズによる時間の経過に伴う検出信号の変動を示します。3600秒の観測期間で合計 22 kHz になるドップラーシフトは、この軸で表されます。
VLBI 望遠鏡と相関器にスケジュールを作成して配布し、発見された機会の観測キャンペーンを編成するために、カスタム開発された計画ツールの出力が pySCHED に読み込まれます。pySCHED などの多くの VLBI スケジュール ツールでは、必要な制御ファイルに衛星を観測対象として組み込むことが困難です。これは、これらのツールが宇宙船の観測に使用されたことが比較的少ないためです。私たちのセットアップでは、運用中の VLBI データ取得および処理システムを、運用中の電波源観測に使用されるものと同様に、衛星信号の直接観測に使用できます。pySCHED は、特に、観測中の電波望遠鏡ごとに標高と時間のプロットを提供します。これは、観測ウィンドウのスケジュール設定と参加する望遠鏡の選択に重要です。
4.2 ベピコロンボ宇宙船によるテスト
PRIDE は、原理的には、宇宙船の通信と追跡に使用されるすべての周波数帯域の無線信号で動作できます。ただし、最近まで、この技術は S バンドと X バンドでのみ結果を実証していました。テストケースとして、セクション 3.1と4.1のツールと方法論を使用して、Ka バンドでの BepiColombo 観測を計画、スケジュール、実行しました。これらの実験の主な目的は、より大規模な PRIDE-JUICE 運用の予行演習と準備活動として機能することです。JUICE と BepiColombo の無線通信システムと無線科学機器は非常に似ているため、BepiColombo はテストと準備に最適な選択肢です。
実験の主な目的は、ベピコロンボの電波信号をXバンドとKaバンドで同時に検出することでした。2021年から2022年の間に20を超えるエポックが観測されました。ここで検討する特定のエポックでは、南オーストラリア州のタスマニア大学 (UTAS) セドゥナ (Cd)、ノーステリトリー州のキャサリン (Ke) の電波望遠鏡と、ニューサウスウェールズ州のモプラ (Mp) にある連邦科学産業研究機構 (CSIRO) の望遠鏡を使用して、並行してセッションを実施しました。
図 8 は、BepiColombo-PRIDE 実験の設定、モレワイデ図法、および拡大したファインディングチャートを示しています。図 9は、このキャンペーンで使用された望遠鏡の SCHED 仰角時間プロットで、開発したツールの出力を示しています。Cd と Ke は X バンドで探査機のダウンリンク信号を追跡し、Mopra は K aバンドで無線信号を追跡しました。探査機は、西オーストラリア州ニューノルシア (NNO) の ESTRACK 地上局と双方向モードで動作していました。アップリンク周波数は、搭載された X/Kaトランスポンダー (7.1 GHz にロック) でロックされていました。3 つのアンテナすべてのスケジュール ファイルを生成し、Ke と Cd については VLBI データ交換形式 (VDIF)、Mp については LBA データ形式でデータを記録しました。Mopra での地心周波数検出を図 10に示します。図 9に示すように、観測は低い標高で行われました。したがって、Mopraスキャンは3回しか得られませんでした。セッションは20分間のスキャン3回に延長されました。セッションのドップラーノイズまたは確率的ノイズは10mHzの範囲でした(図 10を参照)。
このセクションでは、BepiColombo の特定のケースで当社の計画およびスケジュール ソフトウェアを使用して実行された観測キャンペーンの結果を示します。これらの特別に設計されたモジュールは、計画された観測時間中に宇宙船が望遠鏡の観測可能領域内にあることを確認するための綿密なスケジュール設定に役立ちます。さらに、このソフトウェアにより、宇宙船の運用で予期しない変更が発生した場合でも、観測計画を (ほぼ) リアルタイムで簡単に変更できます。これらのモジュールにより、ミッション オペレーター、地上観測所、および VLBI 相関器間のコラボレーションが容易になり、観測が成功し、効果的になります。木星系での当社の科学運用では、PRIDE が科学データ製品に与える影響を最大化するために、VLBI データの品質が最も重要になります。改良されたエフェメリスに使用するための VLBI データの処理までを含め、ソフトウェアと方法論をエンドツーエンドでテストする最初の機会は、2025年の JUICE 金星フライバイです。セクション4.4では、VLBI データの品質 (したがって適切な計画とスケジュール) が科学データ製品の品質にどのように波及するかを定量化する数値シミュレーションの結果を示します。
4.3 JUICE金星フライバイに備えて潜在的なVLBI較正源を観測
JUICE は、2025年 8月 31日 (表 2 ) に金星フライバイ (実験 PRIDE-EXP2、表 3およびセクション 3.3を参照) を実行します。PRIDE 観測 (JUICE がこのフライバイの前、最中、または後に無線信号を送信しているとき) を実行する計画には、いくつかの理由があります。PRIDE-EXP2 は、木星系で後に実行される PRIDE 運用の完全なリハーサルを行うユニークな機会を提供するだけでなく、金星のエフェメリス ソリューションの正確で独立した検証を約束することで、それ自体に潜在的な科学的価値を持っています (詳細についてはセクション 4.4を参照)。金星フライバイ付近の電波背景を改善するために、準備的な VLBI 実験が EVN と共同で設計され、実行されました (プロジェクト EP129、PI: K. Perger)。
PRIDEの科学成果の品質は、近くの位相較正源のVLBI観測に依存しているが[48] ICRFと正確にリンクされた立場[44]、ICRF源は4つしか発見されていない。2∘
金星フライバイの日付を中心とした5日間の探査機の軌道の図(図 11)。この天域には、XバンドでVLBI検出された9つの既知のソースがRFC [53]。これらの天体の一部をJUICE VLBI測定の基準天体として使用するには、その座標をICRFの近傍の天体に対する相対天文観測(ノッディング式位相参照)によってICRFにリンクさせる必要がある。この目的のために、我々は3つのRFC天体(J0832+1953、J0839+1921、J0846+1735、表 4参照)を選択した。
1∘JUICE軌道の軌道の外側にあるこれらの源は、2つの異なる近隣のICRF源とリンクしており、そのエリアの既存のICRF源をうまく補完し、PRIDE-EXP2のノッディングスタイルの位相基準源として機能します。もう1つのRFC源であるJ0817+1958は、図11のスカイチャートで 既知のVLBI源がまばらに見られる期間の初めに重要な潜在的な位相基準オブジェクトになりますが、残念ながらICRF源は見つかりません。
2∘そのため、金星フライバイ付近のJUICEの現在の電波背景は、取得できるVLBIデータの品質を制限する可能性があります。私たちの準備実験は、この問題を軽減します。
表4:2025年のJUICE金星フライバイ時に実施されるPRIDE-EXP2の既知および潜在的な較正源。5つのICRF源(上)と4つの追加のRFC源(中央)は、XバンドVLBIですでに検出されていますが、9つの潜在的なインビーム較正源(下)の適合性は、専用の準備VLBI実験で検証する必要があります。源の位置を示すスカイチャートは、図 11に示されています。

注: ∗ – 正確な位置は ICRF にリンクされます。† – VLBI 検出可能性は EVN 実験 EP129 で確認されます。
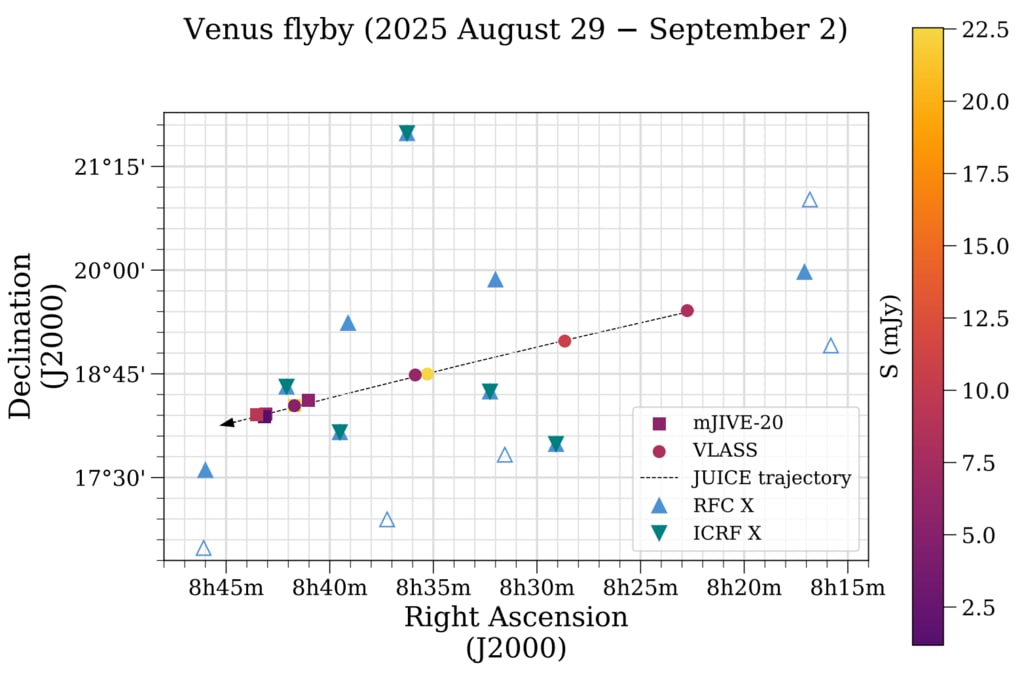
図11:mJIVE-20およびVLASSカタログの電波源
4′JUICEの金星フライバイの5日間の軌道(破線で表示)を示す。Lバンド(1.4GHz)における全フラックス密度は色でコード化されている。ICRFおよび/またはRFCの既知のVLBI較正源は、〜2∘も示されています。塗りつぶされた記号でマークされたソースは、インビーム(丸と四角)またはノッディングスタイル(三角形)の潜在的な位相基準キャリブレータです。それらの座標のリストは表 4に示されています。
直径32メートルの電波望遠鏡の一次ビームの半値幅は〜4′Xバンドで。したがって、適切な校正源を特定することで、4′JUICEの軌道は、金星フライバイの前後に、ネットワークによるビーム内位相参照観測を可能にする。
〜32候補天体の探索には、20cmのmJy Imaging VLBA Exploration (mJIVE-20) [59] 1.4GHzのVLBAで検出されたソースを含むリストと、第2期の超大型干渉電波望遠鏡(VLASS)[58]カタログの3GHzでのみ検出されています。後者のソースは、短基線接続要素干渉計であるKarl G. Jansky超大型干渉計(VLA)でのみ検出されており、ミリ秒スケールの構造とVLBI検出可能性はまだ不明です。合計で12電波源、磁束密度は最大約24 mJy、mJIVE-20および/またはVLASSのJUICE軌道に沿って。
3源は弧秒スケールでローブが支配的な形態を呈していることが判明したため、サンプルから除外された。残りの9(図 11、表 4)は、インビーム位相基準較正器の候補として考えられます。これらのVLBIによる検出可能性とJUICEの較正器としての適合性は、事前のXバンド撮像観測によって確認する必要があります。候補インビーム基準源J0822+1930については、最も近いICRF源(J0829+1754、2.26∘) と、金星フライバイ前の期間の潜在的な位相基準源として前述した RFC 源 J0817+1958 を関連付ける。このようにして、J0822+1930 の検出に成功した場合、J0817+1958 の位置は間接的に ICRF にリンクされる可能性がある。
10-h 準備 EVN 実験は、2024年 2月 23 ~ 24日に実施されました。執筆時点では、相関のためにデータを準備中です。相関、較正、データ分析の後、結果は PRIDE-EXP2 の計画に利用できるようになります。特に、この実験により位相基準ソースの品質、多様性、密度が向上し、金星フライバイの近くで JUICE のより正確な VLBI 観測が可能になります。これの潜在的な科学的意味については、次のセクションで説明します。
4.4 JUICE金星フライバイの展望
惑星および衛星のエフェメリスを改善することは、JUICE ミッションにおける PRIDE の主要目的です。セクション 3.1で述べたように、巡航段階で JUICE 探査機が実行する金星フライバイは、PRIDE 技術、エフェメリスに入力データ ポイントを提供するためのデータ解析手順、および PRIDE 観測量がエフェメリスの解にもたらす改善を定量化する絶好の機会となります (PRIDE-EXP2、表 2 )。フライバイ エポックでの金星の非常に正確な標準点 (局所状態解) を提供できるため、方法論の検証に役立ち、金星のエフェメリスに対する追加の検証機会が提供されます。このセクションでは、この金星フライバイ実験をシミュレートし、PRIDE VLBI 測定の精度レベルが金星の状態解に与える影響を分析します。これにより、スケジュールと計画がサイエンス リターンに与える影響を直接定量化できます。 PRIDEからの科学的成果(エフェメリスの改善の観点から)は主にフライバイで取得されたデータから得られるため、[45]、金星へのフライバイは最も興味深いものです。
金星で達成可能な局所状態解の精度を定量化するために、Tudat 3ソフトウェア[60]を使用して共分散分析を実行します。PRIDEドップラーデータをシミュレートします[60秒ごと、ノイズレベル35μm秒^-1 ;10]、および20分ごとの独立したVLBI測定。最接近地点を中心とした2時間の追跡アークを想定した。異なるVLBIノイズレベルを考慮し、 [45]、さまざまなデータ品質シナリオが状態推定に与える影響をテストする[同様の分析については、46、27]木星系のVLBIシミュレーションの詳細な説明は[45表4に示された異なる位相較正器が調査され、それらのICRF位置不確実性はVLBI観測量に対する系統的誤差(すなわちバイアス)として含められた[45] を選択し、解析の検討対象パラメータとして追加しました(下記参照)。より正確には、JUICE から 2 度以内に特定された RFC キャリブレータ 4 台と ICRF キャリブレータ 2 台を選択し、ICRF 位置誤差の代表的な範囲をサンプリングしました(表5を参照)。表4にリストされている潜在的なインビーム キャリブレータは、位相参照ソースとしての適合性がまだ確認されていないため選択されませんでした(潜在的に適切なインビーム キャリブレータの選択については、セクション 4.3を参照)。さまざまなケースの結果を比較することで、観測計画の改善に向けた取り組みを拡大することの付加価値に関する情報が得られます。
シミュレーションされたPRIDE観測値から、フライバイ時のJUICEと金星の状態を推定した。JUICE探査機の状態には事前制約は適用されなかったが、金星の状態に対する事前不確実性はINPOP21 [61]および DE440 [62]の天体暦解は、金星の天体暦誤差の控えめな推定値として使用されます。これにより、 10m (半径)、480m (接線)、630m (法線) という事前制約が導かれ、半径位置はマゼランとビーナス エクスプレスのデータによって非常によく制約されます。
表5:JUICE フライバイ時の金星の位置の正式な不確実性。さまざまな位相キャリブレータと VLBI ノイズ レベルを使用しています。VLBI バイアスは、2 列目と 3 列目に報告されているキャリブレータの位置の不確実性によって定義されます。結果として得られる金星の状態ソリューションは、RTN (ラジアル、タンジェンシャル、ノーマル) 座標で最後の 3 列に示されています。

JUICEとVenusの状態に加えて、現在の不確実性が推定に考慮されるように、いくつかの考慮されたパラメータを追加しました[63]金星の重力パラメータ、次数10までの球面調和重力場係数、および極の向きが含まれ、それらの不確実性はマゼランデータ解析から得られた正式な不確実性に基づいていました[64]および地上観測[65]。しかし、[64]。追跡中に1時間ごとに推定される宇宙船に作用する経験的加速度。考慮する不確実性は1.0×10^−8 m s^-2 。感度分析として、10 倍高い事前値を使用すると、金星の状態の結果が最小限に変化することを確認しました。最後に、キャリブレータの位置の不確実性と等しい不確実性を考慮して、VLBI バイアスが追加されました。
表 5は、さまざまな VLBI ランダム ノイズ レベルと較正装置の位置の不確実性に対して得られた金星の位置の形式的誤差を示しています。予想どおり、ドップラー測定は金星の状態解に目立った影響を及ぼさず、VLBI が含まれていない場合は事前値に制限されたままであることに注意する必要があります。ただし、VLBI を追加すると、接線方向と法線方向の事前不確実性が大幅に削減されます。金星の半径位置だけは、事前不確実性を超えて改善することはできません(誤差予算に関係なく)。PRIDE VLBI ランダム ノイズ レベルの影響はかなり限られていることは興味深いことです。一方、位相較正装置の選択は重要です。その ICRF 位置の精度は、JUICE の角度位置の VLBI 測定の系統的誤差に直接影響するため、結果として得られる金星の状態解の品質に影響します。これらの結果は、複数のキャリブレーターを使用する可能性や、利用可能なキャリブレーター ソースを拡張/強化するための専用キャンペーンの実行など、利用可能なキャリブレーターの徹底的な分析に対する非常に強い動機付けとなります。特に、キャリブレーターの位置の誤差によって引き起こされる VLBI 測定の系統的バイアスを減らすことが重要です。PRIDE 用に開発され、ここで紹介されているツールを使用すると、最小限の労力で、このような活動の実現可能性と科学的成果を分析できます。
5 要約と結論
PRIDE は JUICE の 11 の実験の 1 つであり、VLBI とドップラー追跡技術を適用して、ミッションの科学的成果を高めることを目指しています。2031 年に JUICE 宇宙船は木星系に到着し、ガニメデの広範な観測と、エウロパとカリストのフライバイ観測を実施します。PRIDE の 2 つの主な目標は、木星系の天体暦を改良することと、電波掩蔽観測を使用して木星の大気とガリレオ衛星の電離層を研究することです。
この研究では、PRIDE の運用と JUICE 探査機とのエンジニアリングのやり取りについて検討しました。さらに、プロセスの多くのステップを自動化する方法で、PRIDE 観測キャンペーンを計画およびスケジュールするための手順を段階的に示しました。さまざまなミッション段階、特に巡航期間中に JUICE の近距離 VLBI (PRIDE) の対象となる天体領域を選択することにより、スケジュールの重要性と、それが実験の科学的成果に与える影響を示します。JUICE では、電波基本カタログからの銀河系外電波源の検出チャートが作成されました。
ESA の BepiColombo 宇宙船は、将来のオプションの Kaバンド PRIDE 運用のトレーニング ターゲットとして観測されました。PRIDE Kaバンド ドップラー シフト検出の初期結果が示されています。この例は、スケジュール アプローチの柔軟性と、あらゆる惑星ミッションでの運用に対する PRIDE の準備状況を示しており、プロセスを強化し、科学的成果を高めることが証明されています。
さらに、我々は金星フライバイからの潜在的な科学的リターンに対する PRIDE の貢献についての数値シミュレーションを提示しました。このシミュレーションでは、VLBI 観測のさまざまな追跡期間とノイズ レベルを考慮に入れました。これにより、さまざまな取得および誤差予算のシナリオをテストすると同時に、おそらくより重要なこととして、最終的なエフェメリス ソリューションへの影響を定量化することができました。シミュレーションでは、PRIDE VLBI ノイズを低減することで (たとえば、Kaバンドまたはインビーム追跡を使用)、フライバイ天体の状態ソリューションをさらに改善できることも実証されました。さらに、位相校正器の選択は非常に重要です。その ICRF 位置精度は、VLBI による JUICE の位置測定の誤差に直接影響し、金星の状態ソリューションの決定精度に影響します。これらの結果は、校正器の検討を強く推奨しており、複数の校正器を使用したり、校正器のオプションを拡張/改善するための特定のキャンペーンを組織したりすることが含まれる場合があります。校正器の位置の誤差によって引き起こされる VLBI 測定のバイアスを減らすことは不可欠です。これは、VLBI データの品質を最大限に高め、その結果として氷衛星の起源、内部、進化に関する理解を深める上で PRIDE 実験の最大限の科学的貢献を実現するために、ガリレオ衛星フライバイ ツアー中の PRIDE-JUICE 観測を効果的に計画およびスケジュールする必要があることを示しています。
木星氷衛星探査ミッションの運用コンポーネントとしての惑星電波干渉計およびドップラー実験
要約
本稿では、ESA の木星氷衛星探査機 (JUICE) ミッションの科学的構成要素としての惑星電波干渉計およびドップラー測定実験 (PRIDE) 電波天文学観測、および他の将来的な惑星および宇宙科学ミッションのための運用およびエンジニアリング インターフェイスの概要を示します。本稿では、自然電波源の観測と並行して特定の宇宙船の観測スケジュールを作成できるようにする高度なスケジューリングおよび計画方法について説明します。これを実践し、JUICE ミッションの PRIDE に適した自然背景較正源を見つけるために、計画およびスケジューリング ソフトウェアを開発しました。自然天体電波源用の従来のスケジューリング ソフトウェアは、必要な制御ファイルに宇宙船を観測対象として含めるように設定されていません。そのため、観測計画の段階ですでに困難が生じています。本稿では、衛星のスケジューリングと計画のために天体物理学および測地 VLBI で使用される新しいルーチンの開発と既存のルーチンの適応について報告します。 PRIDE 科学観測の分析により、観測計画が改善され、システム エンジニアリング アプローチを使用してミッションのスケジュール方法論が研究されました。さらに、さまざまな周波数帯域にわたって較正電波源を選択するためのチャートの検索などの新しい手順と、科学運用計画に対するそれらの戦略の結果を強調しました。Tudat ソフトウェアに基づく、JUICE 宇宙船の巡航フェーズ中の金星フライバイのシミュレーションも紹介されており、PRIDE 技術をテストし、PRIDE 観測可能物が自然天体の天体暦にもたらす改善を評価する有望な機会となっています。JUICE と同様の無線通信システムを採用している VLBI ネットワークの電波望遠鏡による ESA の BepiColombo の最初の K aバンド (32 GHz) 観測もテスト ケースとして実証されました。これらの活動の主な目的は、今後の PRIDE JUICE 運用の練習となることです。他の宇宙ミッションの計画およびスケジュール ソフトウェアの機能を紹介します。
キーワード:干渉法、VLBI、惑星探査ミッション、宇宙科学ミッション、電波天文学、JUICE、PRIDE
1 導入
超長基線電波干渉法(VLBI)は、1960年代に天体物理学研究を主な目的として、天体電波源の研究における角度分解能を高めるために開発された電波天文学技術である[1、第1章]。この方法は非常に強力で多用途であることが判明したため、天体測定や測地学から天文学や宇宙科学の他の分野への応用が急速に進みました[1、第12章]から基礎物理学[例、2、フォーム+2009ApJ]、太陽物理学と惑星間物質の研究[3、4、5]と深宇宙航行。後者の宇宙船が観測目標とするVLBIの応用については、[6]太陽系内の宇宙船のVLBI観測のほとんどの場合、ターゲットまでの距離はいわゆるフラウンホーファー基準[7この場合は近傍場VLBI観測という用語を使うのが適切です。
図1:木星探査ミッション JUICE (左下の宇宙船) とエウロパ クリッパー (右上の宇宙船) をサポートする PRIDE の概略構成 (縮尺は正確ではありません)。宇宙船は、ミッション固有の地球ベースの追跡ステーション (青い地球ベースのアンテナ) と双方向の無線交信 (青い矢印) を行っています。地球ベースの VLBI 電波望遠鏡 (マゼンタ色の地球ベースのアンテナ 3 つ) は、宇宙船からの無線信号 (黄色の矢印) と遠方の自然天体電波源 (赤い矢印) の放射を受信します。この構成は、X バンドおよび/または K aバンド (それぞれ 8.4 GHz および/または 32 GHz) で動作できます。
惑星電波干渉計とドップラー実験[PRIDE、8、6]は、従来の天文 VLBI 用に開発されたデータ記録および処理技術を活用していますが、ターゲット ソースは宇宙船です (図 1を参照)。PRIDE の主な測定対象は、宇宙船の横方向の天体位置と視線速度です。前者は VLBI 位相参照によって提供され、後者は宇宙船キャリア トーンのドップラー シフトを推定することによって提供されます。PRIDE の方法論については、[6、9、10]、および対応するソフトウェア実装[11] PRIDEは、欧州宇宙機関(ESA)によって木星氷衛星探査機[JUICE、 12、13、14、15、16、およびSpace Science Reviews 2023–2024の特別号、およびその中の参考文献]は、ESAのCosmic Vision 2015––2025の大型フラッグシップ科学ミッションの初となるもので、2023年4月14日に打ち上げられました。JUICEは木星とガリレオ衛星、特にガニメデの調査を行うほか、カリストとエウロパなどの他の衛星の調査も行います。このミッションの科学的焦点の1つは、これらの氷の世界の潜在的な居住可能性です。
木星の現地調査は1970年代にNASAのパイオニア計画から始まった[17]、ボイジャー計画[18、19]、ガリレオ計画に引き継がれた[20、21] 1995年から2003年にかけて実施されたNASAのジュノーミッション[22]は2016年7月から木星系を探査している。その目的は、木星の核と磁場、木星の大気の組成、木星のオーロラの徹底的な研究である。NASAのエウロパ・クリッパー・ミッション[23、24]は 2024 年に打ち上げられ、2030 年から JUICE と合流して木星系の同時現地調査を行う予定です。ジュノー、JUICE、エウロパ クリッパーのミッションは相乗効果が高く、木星とその系に対する理解を大幅に深めることになります。
JUICEミッションにおけるPRIDEの主な科学的目的は、木星系の暦の改善を支援することである[25、26、27]は、ガリレオ衛星の起源、進化、居住可能性に関する研究の科学的成果を高めることになる。PRIDE-JUICEの科学目標の詳細な説明は[6]。
表1:世界の VLBI アレイ。アレイ内の望遠鏡の数と X バンドおよび K aバンドの能力は目安であり、増加する傾向にあります。望遠鏡の中には、複数のアレイに所属しているものもあります。[6詳細は[]をご覧ください。
典型的な PRIDE セッションでは、地上の電波望遠鏡のネットワークが位相参照 VLBI モードで JUICE 宇宙船を観測します。PRIDE には専用の搭載機器はなく、ミッションの無線通信システムに依存しています。PRIDE の主な機器資産は、VLBI を備えた電波望遠鏡、データ転送、およびデータ処理施設の世界規模のネットワークです。特定の PRIDE 観測実行では、地球ベースの電波望遠鏡の組み合わせは、図 2 に示され、2024年3月現在の表1にリストされている ように、世界中に分散した大規模な施設のセットから構成されます。ほとんどの場合、VLBI 望遠鏡は、銀河系および銀河系外天文学、天体測定学、測地学のために構築および運用されており、JUICE やその他の宇宙科学ミッションとは直接関係ありません。PRIDE はこれらのリソースをアドホックな体制で使用します。PRIDE 観測に関与する望遠鏡は、宇宙船から送信された無線信号を受信します。 PRIDE-JUICEでは、Xバンド(8.4GHz)での観測が基本ですが、K aバンド(32GHz)での観測も可能です。
VLBI技術が惑星科学と探査の分野に登場したのは半世紀以上前です。VLBIが支援する惑星および宇宙科学ミッションのレビューについては、[6]ほとんどの場合、惑星探査機のVLBI観測は、ミッションの名目上の科学スイートの一部ではなく、アドホックな補足として実施されました(例:ESAのタイタンホイヘンス探査機[28、29]、カッシーニ宇宙船のVLBA観測[30])。比較的まれなケースでは、VLBI 追跡がミッションの科学的運用の名目上の構成要素として含まれていた。これは、VEGA ミッションの金星気球や、ジョット・ハレー彗星のランデブーへの支援の場合である[31、32、33]中国の月探査計画(嫦娥[34])と火星(天文[35])には、公称状態ベクトル決定およびナビゲーション技術としてVLBI追跡が含まれています。日本の月探査機SELENE [36]と金星太陽帆イカロス[37]も VLBI サポートに依存していました。ただし、これらすべての例では、VLBI 追跡は比較的短いミッション期間にわたって利用されました。
PRIDEとして実施されたJUICEミッションのVLBIコンポーネントは、運用期間が上記の先行機とは異なり、巡航フェーズが8.5年、木星周回が少なくとも3年です。また、これは、太陽系外へのミッションに名目上のコンポーネントとしてPRIDE-VLBIが含まれる初めての機会です。惑星ミッションのVLBI追跡の方法論は、過去20年間にPRIDEグループによって開発され、実証されてきました[6、およびその中の参考文献によると、JUICEミッションの名目上の構成要素としてのVLBI運用の負荷が高いため、グローバルVLBIネットワークを使用した大規模な観測キャンペーンを計画および実施するための新しいアプローチが必要でした。これらの地上VLBI運用は、同様に洗練されているが根本的に異なるJUICE惑星ミッションの運用ルーチンと適切に統合される必要があります。本稿では、このインターフェースと、木星系に到着した後の高運用負荷に備えるための開発について紹介し、地上VLBIネットワークとJUICEミッションの一貫した運用ルーチンの例を示す。
図2:VLBI電波望遠鏡の世界分布(黄色の点で表示)。表示されている望遠鏡のほとんどはXバンド(8.4GHz)で動作し、一部はK aバンド(32GHz)で動作します。後者のいくつかは、X/K a同時観測を行うことができます。この地図は、2024年3月時点の状況を反映しています。JUICEミッションの運用期間中に、より多くのVLBI対応電波望遠鏡がオンラインになると、この地図は変更される可能性があります。クレジット:背景の地図は、Blue Marble Next Generationによって提供された衛星画像合成であり、NASA Visible Earth(%\cmtsf{(SF:␣maybe␣worth␣updating␣to␣the␣actual␣submission␣date)}.https://visibleearth.nasa.gov)の厚意により提供されています。
この論文は、次のように構成されています。第2章では、PRIDE の構成と JUICE との相互作用、および科学的要件と他の機器との連携方法について説明しています。第3章では、実験の計画とスケジュールの方法について詳しく説明します。ここでは、これがデータ品質に影響を与えるさまざまな理由について説明し、巡航段階でこれが JUICE ミッションに影響を与えるさまざまな機会について概説します。第4章では、計画とスケジュールを自動化するために開発された特定のツールを紹介し、BepiColombo 宇宙船による最初の PRIDE Kaバンド観測でのこれらのツールの適用と結果を示し、これらのツールが金星フライバイ実験中の PRIDE 観測からの科学的成果に与え得る潜在的な影響を定量化するための数値シミュレーションを提供します。最後に、第5章で結論と展望を示します。
図3:PRIDE VLBI 観測実行アクティビティとデータ処理。主な手順には、観測ブロックのスケジュール設定、.vex ファイルの準備、各望遠鏡のキャリブレーション データとベースバンド データの収集が含まれます。PI にリリースされる最終的な可視性データは、キャリブレーション データとバンドルされています。近距離または遠距離 VLBI の場合、信号処理には遅延モデルのほか、パルサー処理、スペース VLBI アンテナ サポート、広域 VLBI の複数の位相中心、スペクトル ウィンドウ、カスタマイズされたチャネル化などのオプションの処理を含めることができます。データの確認と EVN または惑星データ システム (PDS) 標準へのアーカイブ化は、最後の手順です。
2 PRIDE–JUICE の基本構成、要件、実装
2023年4月14日、JUICEはフランス領ギアナのクールーにあるギアナ宇宙センターからアリアン5 ECA(進化型極低温モデルA)ロケットを使用して打ち上げられました[38]。このミッションは3つのフェーズ、すなわち巡航フェーズ、2031年7月に木星周回軌道投入(JOI)で始まる木星ツアー、そして2034年12月にガニメデ周回軌道投入(GOI)で始まり、名目上は2035年9月に終了するガニメデフェーズから構成される。最新のミッションの統合ミッション分析報告書(CReMA)5.0b23によると[39]、JUICEは2034年にガニメデの極軌道に入る前に、ガニメデ、カリスト、エウロパの多数のフライバイ調査を実施する。JOIまでの約8年間にわたる巡航フェーズでは、2024年8月に月と地球のフライバイ、2025年8月に金星のフライバイ、2026年9月と2029年1月にそれぞれ2回の地球フライバイが行われる予定。科学的な可能性として、1つ以上の小惑星のフライバイが調査されている[40]。
セクション2.1では、 PRIDE が観測値を生成するために使用する信号である JUICE 無線システムについて概要を説明し、セクション2.2では PRIDE-JUICE の科学的目的と運用について簡単に説明します。
2.1 JUICEラジオシステム
宇宙船の通信サブシステムは、アップリンクに X バンド、ダウンリンクに X バンドと K aバンドを使用する冗長化された深宇宙トランスポンダー (DST) セットで構成されています。科学ペイロードには、搭載された無線科学機器 3GM [木星とガリレオ衛星の重力と地球物理学;41このトランスポンダにより、Kaバンドのアップリンクとダウンリンクを使用して、高精度の無線科学ドップラーおよび距離データを生成することができます。宇宙船のアンテナは、固定式高利得アンテナ (HGA) (デュアルバンド X および Ka )、可動式中利得アンテナ (MGA) (デュアルバンド X および Ka )、および 2 つの固定式 X バンド低利得アンテナ (LGA) で構成されています。巡航中は、X バンドのアップリンクとダウンリンクがデフォルト設定です。
JUICE ミッションは、ミッション運用センター (MOC) と科学運用センター (SOC) で構成される ESA 地上セグメントによって運用されます。MOC は地上セグメントの開発と宇宙船の運用を担当し、SOC は科学運用要求の調整、準備、MOC への送信、および MOC から取得したデータの配信の調整を担当します。PRIDE 地上セグメントは、宇宙船が通信または無線科学用の無線信号を発信するたびに観測を行うことができます。宇宙船には、他の目的 (ナビゲーションや通信など) のために PRIDE に必要なオンボード無線機器がすでに搭載されているため、PRIDE はミッションのペイロード質量予算に影響を与えません。
2.2 PRIDE–JUICE 科学目標と運営
PRIDEの科学的目標のほとんどは、PRIDE [8]と 3GM [413GMは、ベピコロンボの水星探査機電波科学実験(MORE)実験(3GMと非常によく似ている)のために開発された手順に従って、高精度の距離測定とドップラー測定を提供します。42]。PRIDE は、3GM が専用の追跡局で取得したドップラー データに加えて、各受信電波望遠鏡でドップラー推定値を提供します。PRIDE は、原理的には JUICE からのあらゆる無線信号で動作できますが、追跡の一般的な動作モードでは、ESTRACK 局のアップリンクからのコヒーレント ダウンリンクを使用します。JUICE 無線信号が X バンドだけでなく Ka バンドでもトランスポンディングされると (利用可能な場合は、X バンドと Ka バンドを組み合わせたアップリンクから)、PRIDE 測定のノイズ パラメータが強化されます。これにより、荷電粒子によるノイズの較正が可能になります。このデュアル周波数動作は、3GM Ka バンド トランスポンダー (KaT) によって実現されます。PRIDE の運用上の利点は、複数の地上受信アンテナを使用できることです。これにより、最良の天候、電離層条件、および JUICE のより高い高度を地元の地平線上で受信できる可能性が高くなります ( [43])。JUICE電波科学実験全体におけるPRIDEの役割に関する詳細な議論については、[6さらに、ここで議論されているトピックにとって最も重要なことは、PRIDE が国際天体基準座標系[ICRF ;44]。
図4:2023年の打ち上げに向けた惑星間巡航段階と転送オプションの概要。色分けは、緑は金星重力アシスト(VGA)、青は地球重力アシスト(EGA)、オレンジは月地球重力アシスト(LEGA)です。[39] JUICE の打ち上げは、この図のベースライン計画よりも 1 週間強早く行われたことに注意してください。これは、ここに示す一般的な軌道計画には影響しません。
PRIDE VLBI測定は、木星の通常の位置(面外方向)とガリレオ衛星の計算を改善することが期待されています。特にカリスト[25、45さらに、PRIDE VLBIデータは、エフェメリス解の独立した検証として貴重であり、JUICE探査機、ガリレオ衛星、および木星自体の完全に結合した動的解を開発する上で大きな価値を持つでしょう[26、46]他の手段との相乗効果の完全な概要については、[6]。PRIDEは、宇宙船のダイナミクスを決定することで抽出された科学データ製品に加えて、過去にPRIDEを使用して金星で行われたように、ガリレオ衛星と木星の大気の探査として電波掩蔽実験を実行するために使用されます[43]。 PRIDE に関係する電波望遠鏡の収集エリアは、通常の単一追跡ステーションの観測と比較して非常に広く、また PRIDE の地球規模の性質によって観測ジオメトリや現地の気象条件がより多様化するため、より質の高い掩蔽測定が可能になります。 PRIDE 信号検出に複数のステーションを使用すると、地球の大気による伝播エラーが減り、空間解像度とジオメトリ精度が向上し、全体的な信号強度が向上し、ノイズが最小限に抑えられます。これにより信号対雑音比 (SNR) が向上し、より高品質の観測が保証され、掩蔽中に宇宙船からの微弱な信号を検出するのに不可欠です。[43]は、PRIDE ステーションを利用した Venus Express (VEX) による掩蔽は、専用の Deep Space Network (DSN) や ESTRACK 施設で行われた掩蔽に比べて、金星の大気圏へのより深い侵入を達成できることを実証しました。PRIDE は、[47]。
PRIDE の地上セグメントの運用は、地上の電波望遠鏡が PRIDE 観測を実施できるかどうかにのみ依存します。後者は、望遠鏡と宇宙船の幾何学的構成、ミッションの無線リンク スケジュール、および無線信号の種類 (搬送波/変調スペクトル) によって定義されます。簡単に言えば、PRIDE の実装では、PRIDE の主要な地上資産と JUICE ミッションとのやり取り中に、既存の技術をピギーバック アプリケーションとしてのみ使用します。ただし、惑星探査機の通常の無線科学と比較すると、PRIDE 観測の計画には、VLBI データから得られるすべての科学成果の品質が、観測中の利用可能な位相較正器と (時間によって変化する) 可視ステーション ネットワークの品質に依存するという複雑さが加わります。これらはすべて、PRIDE によって生成される JUICE の角度位置の品質に影響します。これらの複雑さは「通常の」無線科学観測には存在しないため、その影響についてはあまり詳しく研究されていません。これらの追加された複雑さを自動化し、(可能な場合は)最適化したいという要望が、ここで紹介する作業の必要性の主な動機となっています。
表2:巡航段階のフライバイの概要[39]。
表3:クルーズフェーズ中のPRIDE観測の種類。各実験の期間は≥2 h。
3 PRIDE–JUICE の計画とスケジュール
このセクションでは、さまざまなミッション フェーズでの PRIDE 実験の計画とスケジュール方法の概要、および巡航フェーズでのそれらの適用の概要を示します。現在の文脈では、「計画」という用語は、観測をいつ行うかを決定する一般的な全体的な手順に使用され、「スケジュール」という用語は、使用する地上局、周波数、位相較正器などを決定するより詳細な手順に使用されていることに注意してください。PRIDE 観測を実施する前に、宇宙船の送信ウィンドウ、近くの較正器による (インビーム) 位相参照の機会、地上局の可用性など、多くの基準を考慮する必要があります。観測の計画は、これらの考慮事項によって大きく影響されます。このセクションでは、PRIDE 観測のスケジュール、計画、および準備の手順について説明します。
まず、計画とスケジュールが PRIDE VLBI データの品質に与える影響について、セクション 3.1で説明します。計画とスケジュールの運用手順の基本的な説明は、セクション 3.2で提供します。巡航フェーズの PRIDE 運用については、セクション 3.3で説明し、方法論的検証のための実験が科学的目的にも適用される機会を強調します。特に、木星系での拡張 PRIDE 運用のミッションへの貢献を最大化するための準備として、これらの実験からの科学的成果を向上させるために、計画とスケジュールのツールをどのように使用できるかについて説明します。
3.1 データ品質への影響
VLBIデータから得られるPRIDE科学成果の品質は、近くの位相較正源の観測に依存している[48]は、ICRF で位置が明確に定義されているクエーサーであることが多い。宇宙船と較正器の両方を同じ空の領域から観測して、電離層と対流圏による大気干渉と機器の位相誤差を除去する必要がある。較正器がターゲットから離れすぎると、大気の変化によりこれらの影響を補正することが不可能になる。通常、較正器がターゲットから遠すぎる場合、
〜2∘[43]をターゲットに近づけば、キャリブレーションを実行できます。ただし、望遠鏡をターゲットとキャリブレーターの間で頻繁に前後に操作する必要があり、この手順はノッディングと呼ばれます。適切な参照ソースが利用可能で、適切な計画とスケジュールが立てられている場合は、ビーム内位相参照を使用してキャリブレーションを改善できます。この手法では、参照ソースをターゲット ソースと同じ望遠鏡のプライマリ ビーム内で観測するため、ノッディングが不要になり、データの品質が向上します。
JUICE の VLBI データ ポイントの精度と正確さは、位相基準源の品質と近さに依存します。特定の科学的関心期間中に JUICE に近い適切な位相基準源が利用できない場合は、関心のある空の領域内の適切な基準源のカタログを特に密にするために、専用の観測キャンペーンを実施できます。ただし、このようなキャンペーンは、宇宙船の VLBI 観測とは別に、そのかなり前に実行する必要があります。また、そうすることの最終的な科学的根拠が妥当な場合にのみ行う必要があります。このような準備的な VLBI 実験の例は、 JUICE の金星フライバイの場合について、セクション4.3で説明されています。
PRIDE 技術は、2 機以上の送信衛星からの信号を同時に受信するためにも適用でき、複数の衛星によるインビーム VLBI 観測に使用でき、ICRF における 2 機の衛星の相対角度位置を通常の VLBI 観測値と同等の精度で決定できます。JUICE のコンテキストでは、これは JUICE と NASA の Europa Clipper の同時インビーム PRIDE 観測を実施するユニークな機会を提供し、2 つのミッションのデータ セットからガリレオ衛星の一貫した結合された動的ソリューションを作成するという潜在的に大きな利点があります[46] . エクソマーズ微量ガス探査機の使用[49]と マーズ・エクスプレス[50]、このような二重宇宙船PRIDE実験の予備研究が[51] が火星軌道上にいる。マーズ・エクスプレスと天問1号の同時追跡における伝播効果の比較は、 [52機会があれば、巡航期間中に2機目の宇宙船が見えるPRIDE観測キャンペーンが計画される。
〜2∘木星系での運用に備えてJUICEを開発中。
3.2 運用手順
PRIDE 観測実行の全体的かつ通常のアクティビティを図3に示します 。この図は、どの電波望遠鏡がどの宇宙船をいつ観測するかなど、PRIDE 観測がどのように計画されているかを示しています。観測は、カスタムビルドの計画ソフトウェアを使用して計画されます。スケジューリングは、SCHED または最近では pySCHED 1と呼ばれる VLBI 専用ソフトウェアによって実行されます。スケジューリング ソフトウェアへの入力は、開発された計画ツールの結果と、宇宙船の座標を計算し、さまざまな必要なスケジューリング パラメータを追加するためのアドホック スクリプト2から作成されます。各アンテナの感度、アンテナの取り付け、スルー レート、およびソースの強度を考慮したソースの可視性の正確な計算は、スケジューリング ツールの重要なコンポーネントです。出力は、参加する各電波望遠鏡がデータを取得するために使用する標準形式のスケジュールです。アンテナ ステアリング、シグナル チェーン、サンプラー (デジタイザー) 構成、および記録モードはすべて、ステーション固有のスケジュール ファイルに含まれており、これもスケジューリング プロセスで定義されます。
VLBI電波望遠鏡で宇宙船の信号を観測するには、アップリンクとダウンリンクのセッション、UT範囲、さまざまなエポックでの宇宙船の予測位置を含む適切なタイムスケジュールが必要です。これらの入力は、SOCおよび/またはMOCから事前に予測され、追跡セッション情報とCReMAドキュメントに従って、観測前に準備する必要があります[39]。観測計画とスケジュールが立てられた後、参加する各地上局は、定められた形式で生データをJIVEに送信する。[9、11]を使用して、この時間領域受信データを分析します。最後に、ミッションの後処理とアーカイブ化は、惑星データシステム (PDS) アーカイブ ガイドラインに従って実行されます。
3.3 巡航フェーズ中のミッションシナリオとPRIDE運用
図5:PRIDE 計画およびスケジュール ツールのソフトウェア アーキテクチャ。オレンジ色のブロックで示されるソフトウェアの最初のセクションは入力セクションとして使用され、ユーザー入力、Spice カーネル、および無線基本カタログ (RFC) で構成されます。プログラムの 2 番目のセクションには、特別に作成された Python モジュール、Spicepy ラッパー、および宇宙船の軌道を計算する Astropy (水色) が含まれます。モルワイデ投影を使用したファインディング チャートと拡大されたプロット (図 7に示すようなもの) は、このソフトウェアの 3 番目のセクションと出力セクション (緑色) を使用して生成されます。
ここで説明する実験構成は、地球近傍ミッションフェーズ(NECP)の終了から木星周回軌道投入(JOI)の実行の6か月前まで続くJUICE惑星間転送フェーズ(ITP)/巡航フェーズに基づいています。[40、39] がこのケーススタディの基礎であり、図 4に示されています。ITP 期間中の惑星フライバイ イベントの包括的なリストは表 2に示されています。CReMA [39]バージョン 5.0b23。
前のセクションで概説した PRIDE データ処理パイプラインと方法論は、木星系での科学的活動に備えて、特に自動化とデータ分析手順の改善とテストを行うために、ミッションの巡航フェーズ中に「ライブ」テストで実行されます。これらの実験は主にテストと較正の目的で実行されますが、これらのセッション中に取得された PRIDE データは、表 3にリストされているいくつかの科学的アプリケーションにも使用できます。
ESA の深宇宙ステーション ESTRACK は、主にナビゲーションの目的で、惑星間フェーズ全体にわたって宇宙船の追跡を行うために使用されます。PRIDE は、ITP フェーズと通常フェーズ中に、MOC の標準的な毎週の軌道決定セッションの一部と並行して観測 (PRIDE-EXP1、表 3 ) を実行します。PRIDE は、テスト目的で毎年 4 ~ 6 回の宇宙船観測セッションを実施します。
PRIDEは金星フライバイ(PRIDE-EXP2、表 3)に近い観測を計画している。巡航フェーズ全体の中で、金星フライバイはPRIDEにとって最も科学的に興味深い状況、すなわちガリレオ衛星のフライバイに最も近い。金星フライバイ中は、熱条件(特に天底指向がない)のために宇宙船の制約が高く、ペイロードの運用に厳しい制限が課されることになる[39]フライバイ中(またはフライバイの直前)にMGAがオンになっている場合、フライバイ中のトレーニング実験では、金星のエフェメリスを改善するためのVLBIデータも提供されます。その結果、このデータにより、宇宙船の軌道決定やフライバイターゲットの法線点の推定に至るまでのデータ分析チェーンをテストすることもできます。[26] 。第4.4節では、例として、金星フライバイ中のPRIDE観測の数値シミュレーションの結果をまとめ、VLBIデータの品質、ひいては実験の適切なスケジュールと準備が科学的成果に与える潜在的な影響を定量化し、強調しています。
金星フライバイ中に取得されたVLBIデータに加えて、金星への進入と退出中に取得されたドップラーデータは、金星の大気の掩蔽研究に役立つだろう(PRIDE-EXP3、表 3)。Venus Expressを使用したこのようなデータセットの分析は、 [43]は、電波掩蔽測定における PRIDE の使用と、特に金星での可能性に関する詳細なモデルを提供しました。金星の大気により、金星での掩蔽測定はガリレオ衛星で取得できるものとは根本的に異なりますが、金星の掩蔽データは木星大気の PRIDE 掩蔽に備えるための有用なトレーニング データになる可能性があります。月フライバイ中に PRIDE ドップラー データを取得できれば、ガリレオ衛星での後の観測のための電波掩蔽やバイスタティック レーダー研究のより代表的なテスト ケースとして使用できます。
図6:RFCカタログの合計21,906個のコンパクト電波源の天空分布[53]。
可能であれば、インビームモードで取得されたトレーニングデータセット(PRIDE-EXP4、表 3)が取得されます。ここでは、JUICEと2番目の宇宙船からの信号を同時に追跡する観測と、JUICEと位相較正器からの信号を同時に観測する(たとえば、ノッディングなし)観測の2種類の観測を区別します。「2番目の宇宙船とのインビーム」モードは、JUICEとエウロパクリッパーの同時観測に先立ってPRIDEの運用およびデータ分析システムをテストおよび最適化するのに最も役立ちます[46]。このような観測の機会が生まれるかどうかはまだ明らかではない(例えば、2番目の宇宙船が適切な位置に存在するかどうか)ため、PRIDEチームによる専用の分析のテーマとなる。さらに、適切なインビーム位相キャリブレータが利用できる「通常の」トレーニングセッション(EXP1)中の機会は、インビーム観測のスケジュールとデータ分析手順に利用される。
図7:JUICEミッション(CReMA 5.0)の巡航フェーズにおける2025.01.01から2025.12.31までの期間のPRIDE観測計画図。中央のパネルは、RFC天体源(青い点)が埋め込まれたモルワイデ図法の全天を示しています。上部と下部の2つのパネル(オレンジ色の枠で囲まれている)は、それぞれ1日と1か月の期間の拡大されたファインディングチャートを示しています。赤い点は、RFCからの潜在的な参照源を示しています[53]内にある
1∘JUICE探査機のエフェメリス。青い線はCReMA 5.0に基づくJUICEの天体軌道を示す。影の部分は、
1∘JUICE 天体軌道から。一般に、較正装置は JUICE 宇宙船の天空軌道に沿って均一に分布しています。
最後に、惑星間プラズマシンチレーション(IPS)[54、47]宇宙船の電波信号が太陽風プラズマに与える影響は、すべての巡航段階のテストデータセットを使用して正確に評価されます。このような観測は、2010年にESAの金星エクスプレス[47]、ロゼッタに引き継がれ、現在に至るまで数多くの ESA/NASA ミッション[11]。過去 10 年間で、多数の VLBI 電波望遠鏡を使用して数千回のセッションが実施されました。さらに、コロナ質量放出 (CME) を含む太陽活動を監視する観測キャンペーンが開始されました。これは、これらのイベントが宇宙船と地上アンテナの間を通過し、JUICE 通信システムがアクティブになっているときに無線観測を開始することによって行われます。巡航フェーズで JUICE が送信する信号が、最新の観測を補完することが期待されます。
上記の目的に加えて、PRIDE は、例外または不測の事態として、PRIDE チームと SOC が共同で確立した特別なプロトコルに基づいて、急な観測を行うこともできます。緊急にデータ収集が必要で、通常の観測計画アプローチが不十分な場合、これらの観測モードがアクティブになります。この不測の事態に対する運用モードは、PRIDE の最も重要な運用資産の一部である地上の電波望遠鏡が極めて感度が高く、経度の範囲全体に地理的に分散しているという事実に基づいています。PRIDE は、この運用モードで単一アンテナ (ドップラー測定を含む信号検出) または VLBI 観測を行うことができます。例外的な状況では、前者は約 24 時間の通知で実行できます。
図8:2022年1月1日から2022年12月31日までのBepiColombo-PRIDE計画チャート。上のパネルは、RFC天体源(青い点)が埋め込まれたモルワイデ投影の全天を示しています。下のパネル(オレンジ色の枠)は、1日間の拡大された発見チャートを示しています。赤い点は、RFCからの潜在的な参照源を示しています。
1∘ベピコロンボ宇宙船の天体暦。青い線はベピコロンボの天体軌道と、考えられる参照元を示しています。
4 現在および将来の観測への応用
セクション3.1で説明したように 、PRIDE 実装プロセスの最初のステップでは、ミッションの全体的な科学運用計画に従って、個別のミッションフェーズで科学の機会を特定します。このセクションでは、計画とスケジュールをサポートするために開発したツールを紹介し、過去と今後の実験の例示的な結果を示します。カスタム開発された観測計画ツールの詳細、主に特定の時代における宇宙船の天体位置近くの潜在的な位相参照キャリブレーターの特定については、セクション 4.1で説明します。セクション 4.2では、PRIDE 観測計画およびスケジュール ツールの BepiColombo ミッションへの適用について説明します。これは、PRIDE チームによる K aバンドでの宇宙船信号の最初の取得を表し、K aバンドでの PRIDE の概念的な実現可能性を実証しました。 2025 年の JUICE 金星フライバイの前に、較正源の特性評価と、潜在的に適切なインビーム位相基準較正源を探すための準備 VLBI 実験の計画については、セクション 4.3で説明します。最後に、セクション 4.4では、VLBI データの取得とエフェメリスの改善のための最初のエンドツーエンドテストである金星フライバイ (セクション3.3と4.3を参照)中に PRIDE-JUICE の効果的な計画とスケジュール設定、およびさまざまな位相較正源の適切な選択が重要であることを強調する数値シミュレーションの結果を示します 。
4.1 計画およびスケジュールツール
マーズ・エクスプレスやビーナス・エクスプレスなどの過去の惑星探査ミッションでの PRIDE 実験では、必要な観測計画、スケジュール、および関連する交換ファイルを綿密に準備するために、多数の手作業が必要でした。VLBI 宇宙船観測の場合の問題は、広く使用されている測地スケジュール システムが通常、宇宙船を電波源としてサポートしていないことでした。さらに、宇宙船のミッションは動的であり、受信望遠鏡間だけでなく送信局と宇宙船間のスケジュールと調整も必要なため、観測のスケジュール手順にはさらに多くの困難が伴います。宇宙船の軌道と視程、宇宙船の運用上の制約、リアルタイム調整の柔軟性、複数の観測モードの調整、基線長の分布、およびデータの優先順位付けは、宇宙船の VLBI 観測をスケジュールする際の主な課題です。
これらの課題に対処し、プロセスを可能な限り効率化するために、私たちは専用の宇宙船観測計画およびスケジュール モジュールを作成しました。これにより、ユーザーからの必要最小限の入力だけで、今後の実験のための現実的な衛星観測計画を簡単かつ実用的に作成できます。図 5は、PRIDE 計画およびスケジュール プログラムのソフトウェア スタックを示しています。
• L0 (入力): このモジュールには、開始日と終了日、参照フレーム、参照カタログ、SPICE メタカーネル、時間ステップなどの実験のすべての入力が含まれます。
• L1: このモジュールでは、宇宙船の軌道に基づいて潜在的な参照源を識別および分類します。このモジュールは、Spicepy [を使用してJUICE軌道を計算します。55](SPICEツールキット用のPythonラッパー[56])からVLBI RFC座標を抽出し、Astropy [57]。
• L2 (出力): 関心のある特定の実験に対して、モルワイデ投影による検出チャートの形式での視覚化と、特定のイベントのズームイン チャートが生成されます。
[無線基本カタログ (RFC)53] は、現在、潜在的な校正者の探索に利用できるコンパクト電波源の最も完全なカタログです。RFC は、絶対天体測定および測地学プログラム、およびその他の VLBI 研究で生成された利用可能なすべての VLBI データを分析して作成され、数千のコンパクト電波源のミリ秒角精度の位置、地図、相関フラックス密度の推定値を提供します。これには、1980 年から 2023 年の間に VLBI で検出された合計 21,906 のソース (図 6 ) が含まれています。
ツールの最初のステップは、図7に示すような、地球から見た対象宇宙船 (JUICE) の座標を一定期間にわたって表示する、いわゆるファインディング チャートを作成する ことです。弱い天体を観測したり、天体測定研究を実施したりするためには、位相参照キャリブレータ ソースが必要です。これらのソースはコンパクトで、すべてのベースラインで強い信号 (0.3 Jy 以上) を持ち、正確な位相キャリブレーションを保証する必要があります。これには、地上に適切なステーションがあり、空に分布する安定した電波源がわかっていることが不可欠です。2 番目のステップでは、宇宙船のエフェメリスを中心とした空の明確な検索ストリップを作成し、この検索ストリップ内で電波源を検索します。これらのソースはすべて、将来の PRIDE 実験キャリブレータとして使用でき、キャリブレータの適切な選択は VLBI データの品質に影響します。図 7は、JUICE ミッションの巡航フェーズ中の CReMA 5.0 の PRIDE 観測計画チャートを示しています。これらの結果は、ビーム内位相参照観測の事例を検出するために利用される[43] の可能性、または一般的には PRIDE を観察する機会です。
図9:3 つの望遠鏡の高度可視性。UTC に対する高度を表示 (望遠鏡ごとの稼働時間)。位相参照 VLBI セクションに参加した望遠鏡の観測期間 (UTC)。緑、青、赤の色はそれぞれオーストラリアの観測所、モプラ (Mp)、セドゥナ (Cd)、キャサリン (Ke) を表します。
PRIDE JUICEプロジェクトは、特にKaバンド(32GHz)におけるこれらの較正源の黄道面密度に大きく依存しています。現在、図6 に示す位相較正源の現在のリストによると、黄道面に沿ったこれらの源の密度は、高精度のVLBI宇宙船追跡には不十分です [53木星系に到着する前に、探査機の横方向の位置決めをナノラジアン未満の精度で行うために、木星の軌道の周りに校正源の密なグリッドを作成するための専用の観測キャンペーンを実施します。
図10:2022年 4月 11日にモプラで検出された Kaバンドでの地心周波数検出とドップラーノイズ。これは、参照ソースと交互に行われた 20 分間のスキャン 3 回です。横軸は時間を表し、2022年 4月 11日の始業からの秒単位で測定されます。この軸は、モプラ施設で実施された観測の継続時間を示します。この軸に沿った各ポイントは、観測中の特定の瞬間に対応します。縦軸は、Kaバンドで検出された周波数 (kHz) を表します。この周波数軸は、ドップラー効果とノイズによる時間の経過に伴う検出信号の変動を示します。3600秒の観測期間で合計 22 kHz になるドップラーシフトは、この軸で表されます。
VLBI 望遠鏡と相関器にスケジュールを作成して配布し、発見された機会の観測キャンペーンを編成するために、カスタム開発された計画ツールの出力が pySCHED に読み込まれます。pySCHED などの多くの VLBI スケジュール ツールでは、必要な制御ファイルに衛星を観測対象として組み込むことが困難です。これは、これらのツールが宇宙船の観測に使用されたことが比較的少ないためです。私たちのセットアップでは、運用中の VLBI データ取得および処理システムを、運用中の電波源観測に使用されるものと同様に、衛星信号の直接観測に使用できます。pySCHED は、特に、観測中の電波望遠鏡ごとに標高と時間のプロットを提供します。これは、観測ウィンドウのスケジュール設定と参加する望遠鏡の選択に重要です。
4.2 ベピコロンボ宇宙船によるテスト
PRIDE は、原理的には、宇宙船の通信と追跡に使用されるすべての周波数帯域の無線信号で動作できます。ただし、最近まで、この技術は S バンドと X バンドでのみ結果を実証していました。テストケースとして、セクション 3.1と4.1のツールと方法論を使用して、Ka バンドでの BepiColombo 観測を計画、スケジュール、実行しました。これらの実験の主な目的は、より大規模な PRIDE-JUICE 運用の予行演習と準備活動として機能することです。JUICE と BepiColombo の無線通信システムと無線科学機器は非常に似ているため、BepiColombo はテストと準備に最適な選択肢です。
実験の主な目的は、ベピコロンボの電波信号をXバンドとKaバンドで同時に検出することでした。2021年から2022年の間に20を超えるエポックが観測されました。ここで検討する特定のエポックでは、南オーストラリア州のタスマニア大学 (UTAS) セドゥナ (Cd)、ノーステリトリー州のキャサリン (Ke) の電波望遠鏡と、ニューサウスウェールズ州のモプラ (Mp) にある連邦科学産業研究機構 (CSIRO) の望遠鏡を使用して、並行してセッションを実施しました。
図 8 は、BepiColombo-PRIDE 実験の設定、モレワイデ図法、および拡大したファインディングチャートを示しています。図 9は、このキャンペーンで使用された望遠鏡の SCHED 仰角時間プロットで、開発したツールの出力を示しています。Cd と Ke は X バンドで探査機のダウンリンク信号を追跡し、Mopra は K aバンドで無線信号を追跡しました。探査機は、西オーストラリア州ニューノルシア (NNO) の ESTRACK 地上局と双方向モードで動作していました。アップリンク周波数は、搭載された X/Kaトランスポンダー (7.1 GHz にロック) でロックされていました。3 つのアンテナすべてのスケジュール ファイルを生成し、Ke と Cd については VLBI データ交換形式 (VDIF)、Mp については LBA データ形式でデータを記録しました。Mopra での地心周波数検出を図 10に示します。図 9に示すように、観測は低い標高で行われました。したがって、Mopraスキャンは3回しか得られませんでした。セッションは20分間のスキャン3回に延長されました。セッションのドップラーノイズまたは確率的ノイズは10mHzの範囲でした(図 10を参照)。
このセクションでは、BepiColombo の特定のケースで当社の計画およびスケジュール ソフトウェアを使用して実行された観測キャンペーンの結果を示します。これらの特別に設計されたモジュールは、計画された観測時間中に宇宙船が望遠鏡の観測可能領域内にあることを確認するための綿密なスケジュール設定に役立ちます。さらに、このソフトウェアにより、宇宙船の運用で予期しない変更が発生した場合でも、観測計画を (ほぼ) リアルタイムで簡単に変更できます。これらのモジュールにより、ミッション オペレーター、地上観測所、および VLBI 相関器間のコラボレーションが容易になり、観測が成功し、効果的になります。木星系での当社の科学運用では、PRIDE が科学データ製品に与える影響を最大化するために、VLBI データの品質が最も重要になります。改良されたエフェメリスに使用するための VLBI データの処理までを含め、ソフトウェアと方法論をエンドツーエンドでテストする最初の機会は、2025年の JUICE 金星フライバイです。セクション4.4では、VLBI データの品質 (したがって適切な計画とスケジュール) が科学データ製品の品質にどのように波及するかを定量化する数値シミュレーションの結果を示します。
4.3 JUICE金星フライバイに備えて潜在的なVLBI較正源を観測
JUICE は、2025年 8月 31日 (表 2 ) に金星フライバイ (実験 PRIDE-EXP2、表 3およびセクション 3.3を参照) を実行します。PRIDE 観測 (JUICE がこのフライバイの前、最中、または後に無線信号を送信しているとき) を実行する計画には、いくつかの理由があります。PRIDE-EXP2 は、木星系で後に実行される PRIDE 運用の完全なリハーサルを行うユニークな機会を提供するだけでなく、金星のエフェメリス ソリューションの正確で独立した検証を約束することで、それ自体に潜在的な科学的価値を持っています (詳細についてはセクション 4.4を参照)。金星フライバイ付近の電波背景を改善するために、準備的な VLBI 実験が EVN と共同で設計され、実行されました (プロジェクト EP129、PI: K. Perger)。
PRIDEの科学成果の品質は、近くの位相較正源のVLBI観測に依存しているが[48] ICRFと正確にリンクされた立場[44]、ICRF源は4つしか発見されていない。2∘
金星フライバイの日付を中心とした5日間の探査機の軌道の図(図 11)。この天域には、XバンドでVLBI検出された9つの既知のソースがRFC [53]。これらの天体の一部をJUICE VLBI測定の基準天体として使用するには、その座標をICRFの近傍の天体に対する相対天文観測(ノッディング式位相参照)によってICRFにリンクさせる必要がある。この目的のために、我々は3つのRFC天体(J0832+1953、J0839+1921、J0846+1735、表 4参照)を選択した。
1∘JUICE軌道の軌道の外側にあるこれらの源は、2つの異なる近隣のICRF源とリンクしており、そのエリアの既存のICRF源をうまく補完し、PRIDE-EXP2のノッディングスタイルの位相基準源として機能します。もう1つのRFC源であるJ0817+1958は、図11のスカイチャートで 既知のVLBI源がまばらに見られる期間の初めに重要な潜在的な位相基準オブジェクトになりますが、残念ながらICRF源は見つかりません。
2∘そのため、金星フライバイ付近のJUICEの現在の電波背景は、取得できるVLBIデータの品質を制限する可能性があります。私たちの準備実験は、この問題を軽減します。
表4:2025年のJUICE金星フライバイ時に実施されるPRIDE-EXP2の既知および潜在的な較正源。5つのICRF源(上)と4つの追加のRFC源(中央)は、XバンドVLBIですでに検出されていますが、9つの潜在的なインビーム較正源(下)の適合性は、専用の準備VLBI実験で検証する必要があります。源の位置を示すスカイチャートは、図 11に示されています。
注: ∗ – 正確な位置は ICRF にリンクされます。† – VLBI 検出可能性は EVN 実験 EP129 で確認されます。
図11:mJIVE-20およびVLASSカタログの電波源
4′JUICEの金星フライバイの5日間の軌道(破線で表示)を示す。Lバンド(1.4GHz)における全フラックス密度は色でコード化されている。ICRFおよび/またはRFCの既知のVLBI較正源は、〜2∘も示されています。塗りつぶされた記号でマークされたソースは、インビーム(丸と四角)またはノッディングスタイル(三角形)の潜在的な位相基準キャリブレータです。それらの座標のリストは表 4に示されています。
直径32メートルの電波望遠鏡の一次ビームの半値幅は〜4′Xバンドで。したがって、適切な校正源を特定することで、4′JUICEの軌道は、金星フライバイの前後に、ネットワークによるビーム内位相参照観測を可能にする。
〜32候補天体の探索には、20cmのmJy Imaging VLBA Exploration (mJIVE-20) [59] 1.4GHzのVLBAで検出されたソースを含むリストと、第2期の超大型干渉電波望遠鏡(VLASS)[58]カタログの3GHzでのみ検出されています。後者のソースは、短基線接続要素干渉計であるKarl G. Jansky超大型干渉計(VLA)でのみ検出されており、ミリ秒スケールの構造とVLBI検出可能性はまだ不明です。合計で12電波源、磁束密度は最大約24 mJy、mJIVE-20および/またはVLASSのJUICE軌道に沿って。
3源は弧秒スケールでローブが支配的な形態を呈していることが判明したため、サンプルから除外された。残りの9(図 11、表 4)は、インビーム位相基準較正器の候補として考えられます。これらのVLBIによる検出可能性とJUICEの較正器としての適合性は、事前のXバンド撮像観測によって確認する必要があります。候補インビーム基準源J0822+1930については、最も近いICRF源(J0829+1754、2.26∘) と、金星フライバイ前の期間の潜在的な位相基準源として前述した RFC 源 J0817+1958 を関連付ける。このようにして、J0822+1930 の検出に成功した場合、J0817+1958 の位置は間接的に ICRF にリンクされる可能性がある。
10-h 準備 EVN 実験は、2024年 2月 23 ~ 24日に実施されました。執筆時点では、相関のためにデータを準備中です。相関、較正、データ分析の後、結果は PRIDE-EXP2 の計画に利用できるようになります。特に、この実験により位相基準ソースの品質、多様性、密度が向上し、金星フライバイの近くで JUICE のより正確な VLBI 観測が可能になります。これの潜在的な科学的意味については、次のセクションで説明します。
4.4 JUICE金星フライバイの展望
惑星および衛星のエフェメリスを改善することは、JUICE ミッションにおける PRIDE の主要目的です。セクション 3.1で述べたように、巡航段階で JUICE 探査機が実行する金星フライバイは、PRIDE 技術、エフェメリスに入力データ ポイントを提供するためのデータ解析手順、および PRIDE 観測量がエフェメリスの解にもたらす改善を定量化する絶好の機会となります (PRIDE-EXP2、表 2 )。フライバイ エポックでの金星の非常に正確な標準点 (局所状態解) を提供できるため、方法論の検証に役立ち、金星のエフェメリスに対する追加の検証機会が提供されます。このセクションでは、この金星フライバイ実験をシミュレートし、PRIDE VLBI 測定の精度レベルが金星の状態解に与える影響を分析します。これにより、スケジュールと計画がサイエンス リターンに与える影響を直接定量化できます。 PRIDEからの科学的成果(エフェメリスの改善の観点から)は主にフライバイで取得されたデータから得られるため、[45]、金星へのフライバイは最も興味深いものです。
金星で達成可能な局所状態解の精度を定量化するために、Tudat 3ソフトウェア[60]を使用して共分散分析を実行します。PRIDEドップラーデータをシミュレートします[60秒ごと、ノイズレベル35μm秒^-1 ;10]、および20分ごとの独立したVLBI測定。最接近地点を中心とした2時間の追跡アークを想定した。異なるVLBIノイズレベルを考慮し、 [45]、さまざまなデータ品質シナリオが状態推定に与える影響をテストする[同様の分析については、46、27]木星系のVLBIシミュレーションの詳細な説明は[45表4に示された異なる位相較正器が調査され、それらのICRF位置不確実性はVLBI観測量に対する系統的誤差(すなわちバイアス)として含められた[45] を選択し、解析の検討対象パラメータとして追加しました(下記参照)。より正確には、JUICE から 2 度以内に特定された RFC キャリブレータ 4 台と ICRF キャリブレータ 2 台を選択し、ICRF 位置誤差の代表的な範囲をサンプリングしました(表5を参照)。表4にリストされている潜在的なインビーム キャリブレータは、位相参照ソースとしての適合性がまだ確認されていないため選択されませんでした(潜在的に適切なインビーム キャリブレータの選択については、セクション 4.3を参照)。さまざまなケースの結果を比較することで、観測計画の改善に向けた取り組みを拡大することの付加価値に関する情報が得られます。
シミュレーションされたPRIDE観測値から、フライバイ時のJUICEと金星の状態を推定した。JUICE探査機の状態には事前制約は適用されなかったが、金星の状態に対する事前不確実性はINPOP21 [61]および DE440 [62]の天体暦解は、金星の天体暦誤差の控えめな推定値として使用されます。これにより、 10m (半径)、480m (接線)、630m (法線) という事前制約が導かれ、半径位置はマゼランとビーナス エクスプレスのデータによって非常によく制約されます。
表5:JUICE フライバイ時の金星の位置の正式な不確実性。さまざまな位相キャリブレータと VLBI ノイズ レベルを使用しています。VLBI バイアスは、2 列目と 3 列目に報告されているキャリブレータの位置の不確実性によって定義されます。結果として得られる金星の状態ソリューションは、RTN (ラジアル、タンジェンシャル、ノーマル) 座標で最後の 3 列に示されています。
JUICEとVenusの状態に加えて、現在の不確実性が推定に考慮されるように、いくつかの考慮されたパラメータを追加しました[63]金星の重力パラメータ、次数10までの球面調和重力場係数、および極の向きが含まれ、それらの不確実性はマゼランデータ解析から得られた正式な不確実性に基づいていました[64]および地上観測[65]。しかし、[64]。追跡中に1時間ごとに推定される宇宙船に作用する経験的加速度。考慮する不確実性は1.0×10^−8 m s^-2 。感度分析として、10 倍高い事前値を使用すると、金星の状態の結果が最小限に変化することを確認しました。最後に、キャリブレータの位置の不確実性と等しい不確実性を考慮して、VLBI バイアスが追加されました。
表 5は、さまざまな VLBI ランダム ノイズ レベルと較正装置の位置の不確実性に対して得られた金星の位置の形式的誤差を示しています。予想どおり、ドップラー測定は金星の状態解に目立った影響を及ぼさず、VLBI が含まれていない場合は事前値に制限されたままであることに注意する必要があります。ただし、VLBI を追加すると、接線方向と法線方向の事前不確実性が大幅に削減されます。金星の半径位置だけは、事前不確実性を超えて改善することはできません(誤差予算に関係なく)。PRIDE VLBI ランダム ノイズ レベルの影響はかなり限られていることは興味深いことです。一方、位相較正装置の選択は重要です。その ICRF 位置の精度は、JUICE の角度位置の VLBI 測定の系統的誤差に直接影響するため、結果として得られる金星の状態解の品質に影響します。これらの結果は、複数のキャリブレーターを使用する可能性や、利用可能なキャリブレーター ソースを拡張/強化するための専用キャンペーンの実行など、利用可能なキャリブレーターの徹底的な分析に対する非常に強い動機付けとなります。特に、キャリブレーターの位置の誤差によって引き起こされる VLBI 測定の系統的バイアスを減らすことが重要です。PRIDE 用に開発され、ここで紹介されているツールを使用すると、最小限の労力で、このような活動の実現可能性と科学的成果を分析できます。
5 要約と結論
PRIDE は JUICE の 11 の実験の 1 つであり、VLBI とドップラー追跡技術を適用して、ミッションの科学的成果を高めることを目指しています。2031 年に JUICE 宇宙船は木星系に到着し、ガニメデの広範な観測と、エウロパとカリストのフライバイ観測を実施します。PRIDE の 2 つの主な目標は、木星系の天体暦を改良することと、電波掩蔽観測を使用して木星の大気とガリレオ衛星の電離層を研究することです。
この研究では、PRIDE の運用と JUICE 探査機とのエンジニアリングのやり取りについて検討しました。さらに、プロセスの多くのステップを自動化する方法で、PRIDE 観測キャンペーンを計画およびスケジュールするための手順を段階的に示しました。さまざまなミッション段階、特に巡航期間中に JUICE の近距離 VLBI (PRIDE) の対象となる天体領域を選択することにより、スケジュールの重要性と、それが実験の科学的成果に与える影響を示します。JUICE では、電波基本カタログからの銀河系外電波源の検出チャートが作成されました。
ESA の BepiColombo 宇宙船は、将来のオプションの Kaバンド PRIDE 運用のトレーニング ターゲットとして観測されました。PRIDE Kaバンド ドップラー シフト検出の初期結果が示されています。この例は、スケジュール アプローチの柔軟性と、あらゆる惑星ミッションでの運用に対する PRIDE の準備状況を示しており、プロセスを強化し、科学的成果を高めることが証明されています。
さらに、我々は金星フライバイからの潜在的な科学的リターンに対する PRIDE の貢献についての数値シミュレーションを提示しました。このシミュレーションでは、VLBI 観測のさまざまな追跡期間とノイズ レベルを考慮に入れました。これにより、さまざまな取得および誤差予算のシナリオをテストすると同時に、おそらくより重要なこととして、最終的なエフェメリス ソリューションへの影響を定量化することができました。シミュレーションでは、PRIDE VLBI ノイズを低減することで (たとえば、Kaバンドまたはインビーム追跡を使用)、フライバイ天体の状態ソリューションをさらに改善できることも実証されました。さらに、位相校正器の選択は非常に重要です。その ICRF 位置精度は、VLBI による JUICE の位置測定の誤差に直接影響し、金星の状態ソリューションの決定精度に影響します。これらの結果は、校正器の検討を強く推奨しており、複数の校正器を使用したり、校正器のオプションを拡張/改善するための特定のキャンペーンを組織したりすることが含まれる場合があります。校正器の位置の誤差によって引き起こされる VLBI 測定のバイアスを減らすことは不可欠です。これは、VLBI データの品質を最大限に高め、その結果として氷衛星の起源、内部、進化に関する理解を深める上で PRIDE 実験の最大限の科学的貢献を実現するために、ガリレオ衛星フライバイ ツアー中の PRIDE-JUICE 観測を効果的に計画およびスケジュールする必要があることを示しています。










※コメント投稿者のブログIDはブログ作成者のみに通知されます