








AEROWINXのPSX747-400は引き続き細かな改良が続いていて、このたびバージョン10.1.0にバージョンアップすることになり、そのベータ版が出ました。
なお、このソフトには日本語の公式マニュアルがあります。

今回のバージョンから自動離陸機能が付加されました(正しくはバーチャルパイロットによる離陸)。離陸時の手順の訓練などに使われる機能で、離陸開始から地上400フィートまでを自動で操作します。
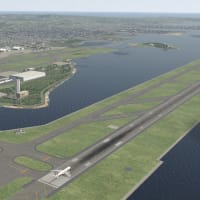
たとえば通常の離陸です。内蔵のシチュエーションから離陸のシナリオを選びます。

そして次の画面の右下にある自動離陸のボタンをクリックします。Situation > Human > PilotにあるInitiateです。

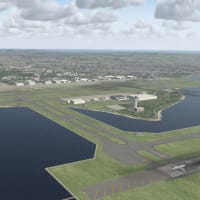
なめらかに離陸します。

地上400フィートでオートパイロットがオンになり、自動離陸は終わります。

続いて1発不作動での離陸です。シチュエーションからTAKEOFF Bのシナリオを選びます。左上にラダーやエルロンの動きが表示されます。4番エンジンが止まった状態で離陸。左のラダーを大きく踏み込んでいます。

地上400フィートでオートパイロットがオンになって自動離陸は終了。

続いて2発不作動。TAKEOFF Aのシナリオです。1番と2番のエンジンが止まりました。右のラダーを一杯まで踏み込んでいます。まだV2に達していません。

一旦引き起こした後、V2まで加速するために上昇を止め、少し高度を下げたりします。しかしなかなかV2に達しません。

そうこうしている間にGPWSが鳴りだしました。2発不作動の時はリアルな人が操縦したほうが上手かもしれません。

ジョイスティックをつながずに離陸すると、あまりきれいに離陸ができません。そういうときにもこのコマンドは役に立ちます。
日々改良が続くPSX747-400です。
(おわり)






※コメント投稿者のブログIDはブログ作成者のみに通知されます