








X-Plane11.11についているデフォルトのB737-800で羽田から伊丹まで飛びます。
ではエンジンの始動です。空調をいったん止めなければなりませんが、当機では自動でやってくれます。一番エンジンのスターターをGRDに。

各メーターが順調に動いていくことを確かめます。

N2が20ぐらいになったら1番エンジンの燃料カットオフスイッチを引き上げてIDLEに。
1番エンジンが始動しました。

続いて2番エンジンのスターターをGRDに。
同じように2番エンジンの燃料カットオフスイッチを引き上げてIDLEに。
エンジン計器が正常であることを確かめます。これでエンジンが始動しました。

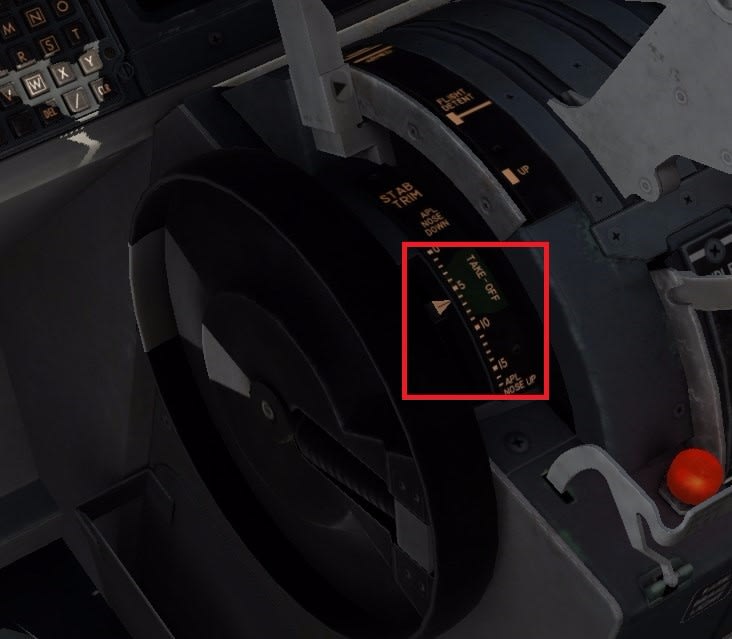
離陸フラップは5度。

フラップ表示機で5度になっていることを確かめます。

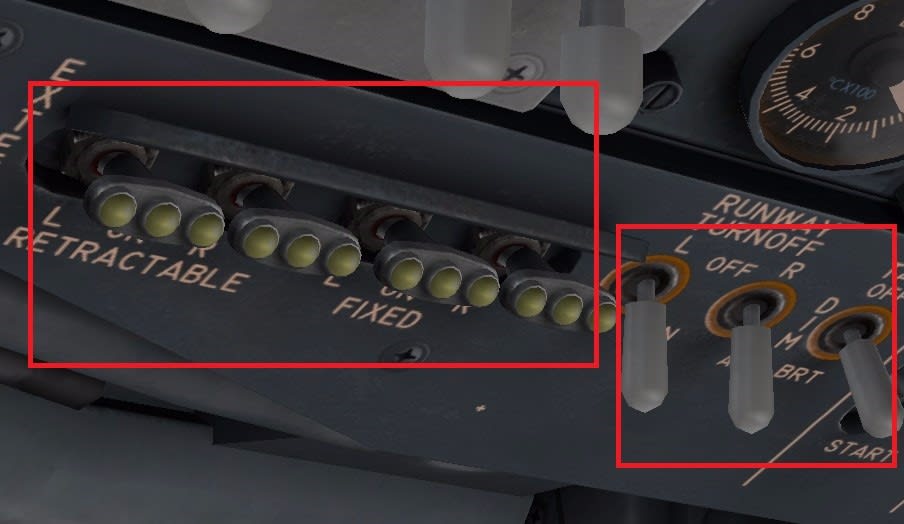
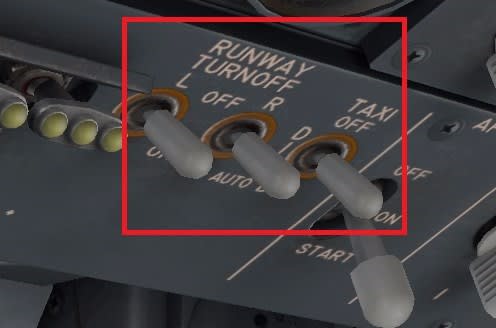
地上走行を始めますのでランウエイ・ターンオフスイッチとタクシー灯をオン。

トリムはデフォルトのままでもよく離陸するので、そのままにしておきます。
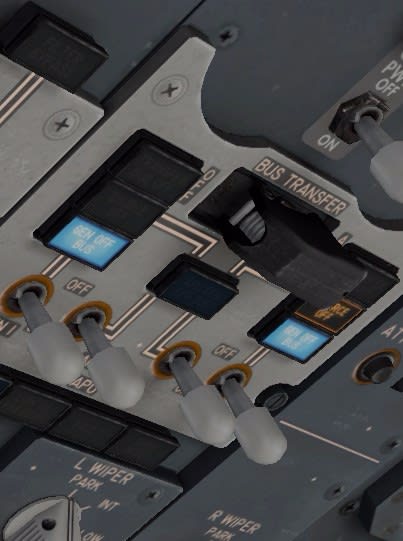
電源をAPUから左右のエンジンに切り替えます。左右のエンジンの電源スイッチをオンに。
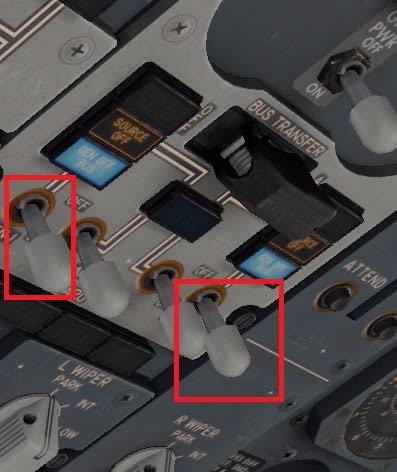
真ん中のAPUのスイッチをオフに。
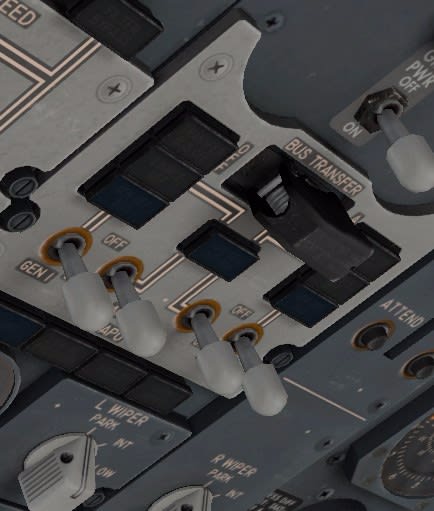
空調の設定はこのデフォルトの機体では自動でやってくれます。APUブリードをオフに。

では地上走行を始めます。パーキングブレーキをオフ。

RWY34Rに向かいます。

滑走路手前です。

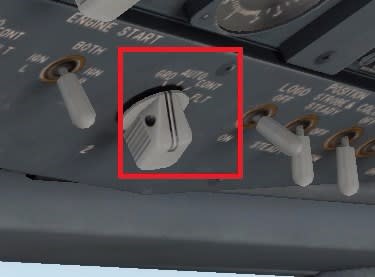
離着陸時にはスターターをCONTにしておきます。

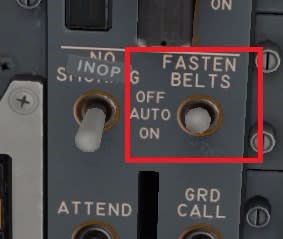
シートベルトサインはAUTOのままにしてあります。

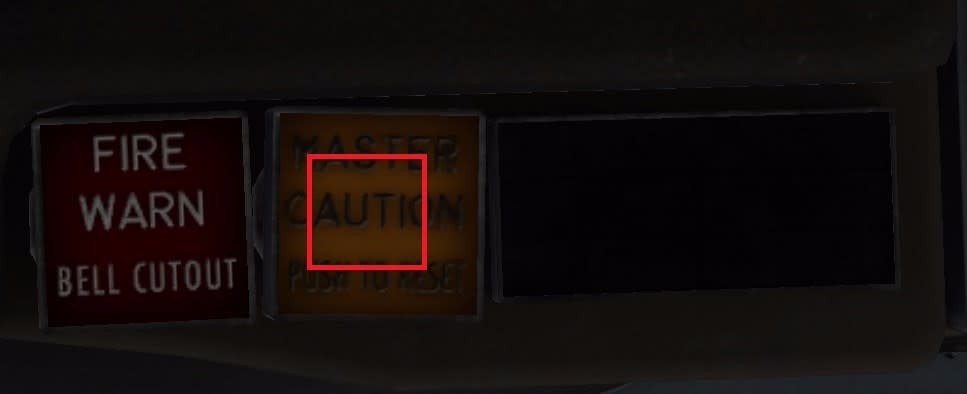
警告が出ていないか確かめます。右席。
左席。何も出てきません。
滑走路手前まで来ました。舵を確かめています。このデフォルト機体では機内に舵の表示が出ないので外から確かめます。

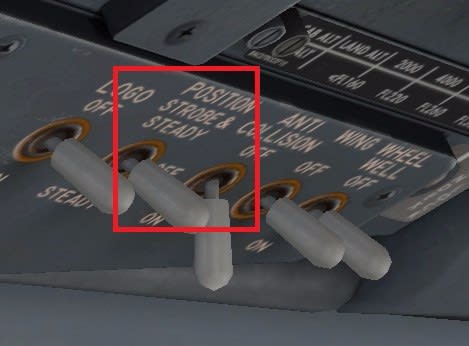
では滑走路に入ります。ストロボ灯をオンに。写真を撮り忘れましたが着陸灯をオンに。ランウエイ・ターンオフライトとタクシー灯をオフに。
トランスポンダをTA/RAに。

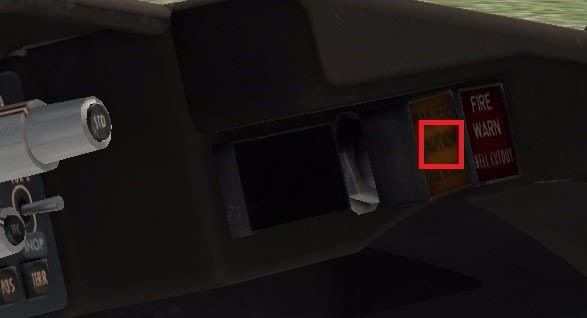
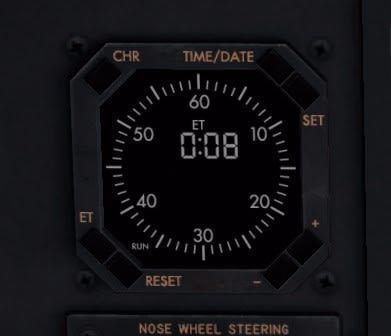
操縦席正面左下の経過時間計をオンに。下の赤い四角のところをクリックすると経過時間計がオンになります。ETの表示があるのが経過時間。右上の赤い四角のところをクリックすると現在の時刻が出てきます。

滑走路に正対します。

スロットルを真ん中ぐらいまで押して正常に推力が出ていることを確かめます。

TO/GAボタンを押して離陸推力を設定します。TO/GAボタンはメインメニューの設定でジョイスティックのボタンあるいはキーボードに割り当てます。ただし、これからわかりますが最大推力が設定されるのでロケットのように急激に上昇していきます。あまりにも推力が強すぎるので、TO/GAボタンは押さずに手動で推力をN1で95%に設定して離陸したほうが慌てずに済むと思います。

地上滑走が始まりました。

あっという間に離陸します。

離陸してからオートスロットル(A/T)をARMに入れるといいです。このデフォルト機体では。

ギアアップ。オートブレーキは自動でOFFに戻ります。

オートスロットルをARMにしたのに続いて、オートパイロットをオンにします。赤枠で囲んだところのCMDボタンをクリックします。

速度は最初から250ノットを目指すことになっているので、離陸してまだ旋回が始まるか始まらないうちからどんどん250ノットに加速していきます。それに合わせてどんどんフラップを上げます。水平儀の上にCMDと出ています。これはオートパイロットが入っていることを示しています。速度は250ノット、高度は24000フィートが目標です。水平儀の上の表示、一番左に白地でARMと出ています。これはオートスロットルがARMされているという意味で、後で水平飛行に移ってオートスロットルが起動するとここに緑色の表示が出ます。水平方向はLNAVですからCDUへの入力したルートで、垂直方向はVNAV SPDですから速度を目標の数値に保つように上昇率を調整します。水平儀下側の白地の数字は電波高度計の数字です。

フラップ表示機はゼロになっています。フラップは全部上がっています。その隣、ギアの3つのランプも消灯しています。これはギアが上がってロックされていることを示します。このデフォルトの機体ではギアのレバーは中央のオフの位置には戻りません。

右旋回ですがなぜか旋回角が10度にしかなりません。

こういう時はたいていMCPの旋回角の指定がずれています。ヘディングを設定するつまみは2重になっています。内側がヘディング、すなわち飛行機が飛ぶ方位の設定、外側が旋回角の設定です。ヘディングを設定するときに気をつけないと外側のつまみを回してしまいます。外側のつまみを30にすると最大30度で旋回します。

上昇旋回を続けています。
30度で旋回しています。あっという間に10000フィートが迫ります。

10000フィートになったら着陸灯をオフ。スターターをAUTOに戻します。

上昇(CLB)画面で設定したように10000フィートの制限がなくなったので速度は290ノットに上がります。

さらに上昇旋回を続けます。
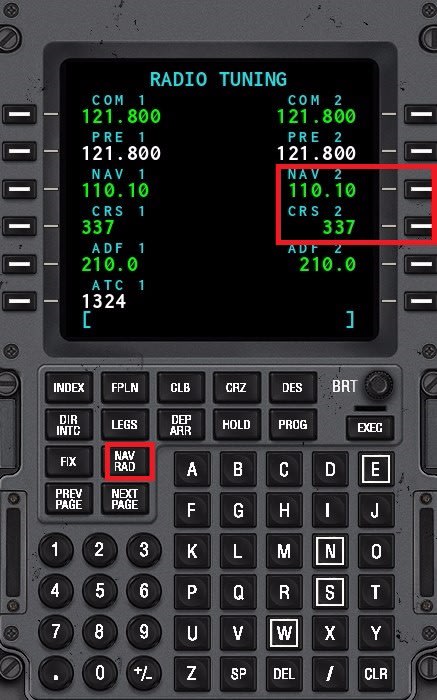
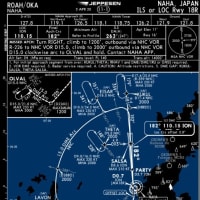
本来はもっと先で設定するのですが、ここで到着地のILS進入の周波数を設定しておきます。CDUのNAVRADボタンを押すとこのような表示になります。ILSの周波数はNAV1に、コースの方位はCRS1にセットします。このデフォルトの機体ではNAV2にも同じ周波数とコースを設定してILSを2チャンネル使って自動着陸することができません。1チャンネルでも荒っぽくなりますが自動着陸することはできますが。

あっという間に巡航高度のFL240に到達です。速度は目標の290ノットのまま。高度が次第に24000に合わせられていきます。そして水平儀の上の左側、オートスロットルのところが緑の文字でFMC SPDとなりました。これは先ほどCDUで設定した速度になるようにエンジンの推力をオートスロットルが調整しますという意味です。ヨコ軸の操作は引き続きLNAV。水平儀の下にマジェンタの三角が出ていますが、これが中央に来ているときは指定したコースの真上を飛んでいるという意味です。また水平儀の上、右側はVNAV ALTとなっています。水平飛行に移りましたからVNAVは高度の維持をつかさどりますという意味です。

さて、ここでMCPにあるSPEEDボタンを忘れずに押してください。これを押しておかないと実は速度の設定が機能しないのです。本来はオートスロットルが動き出したら自動的にこのボタンが押されるべきですが、そうならないので、手動で押してください。現在の機体外面の温度はマイナス32度。燃料をチェックします。現在2万ポンド。中央タンクから燃料を使っていますので、中央タンクだけが量が減っています。

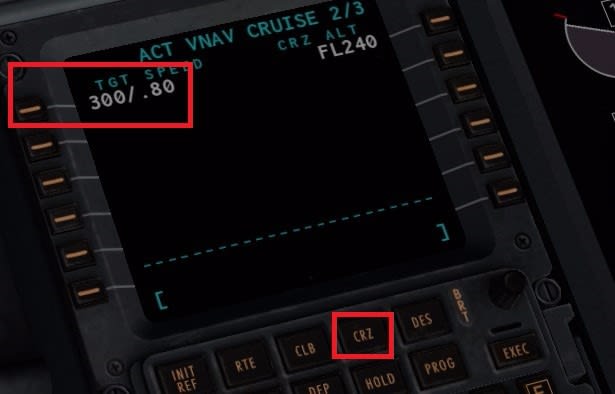
そして巡航に入りましたから設定速度が巡航(CRZ)で設定した速度に変わります。300ノットあるいは0.80ノットでした。

このように設定されています。巡航速度を変えたいときはここを変えます。また巡航高度を変えたいときはその右側のFL240というところを変えます。
ところが今回のフライトではマッハ0.80だと速度が345ノットになり、速度を300ノットにするとマッハが0.695になります。普通はどちらか低いほうで飛びますから300ノットで飛ぶはずなのですが、どういうわけか300ノットと345ノットの間を速度が行ったり来たり、加速したり減速したりします。

これはかなわないので、MCPで速度をマッハ0.80と指定して飛びます。MCPのVNAVボタンを押してこれを消灯させて、速度つまみのヨコにある小さいボタンを押して速度表示をノットからマッハに変えて、0.80を設定します。

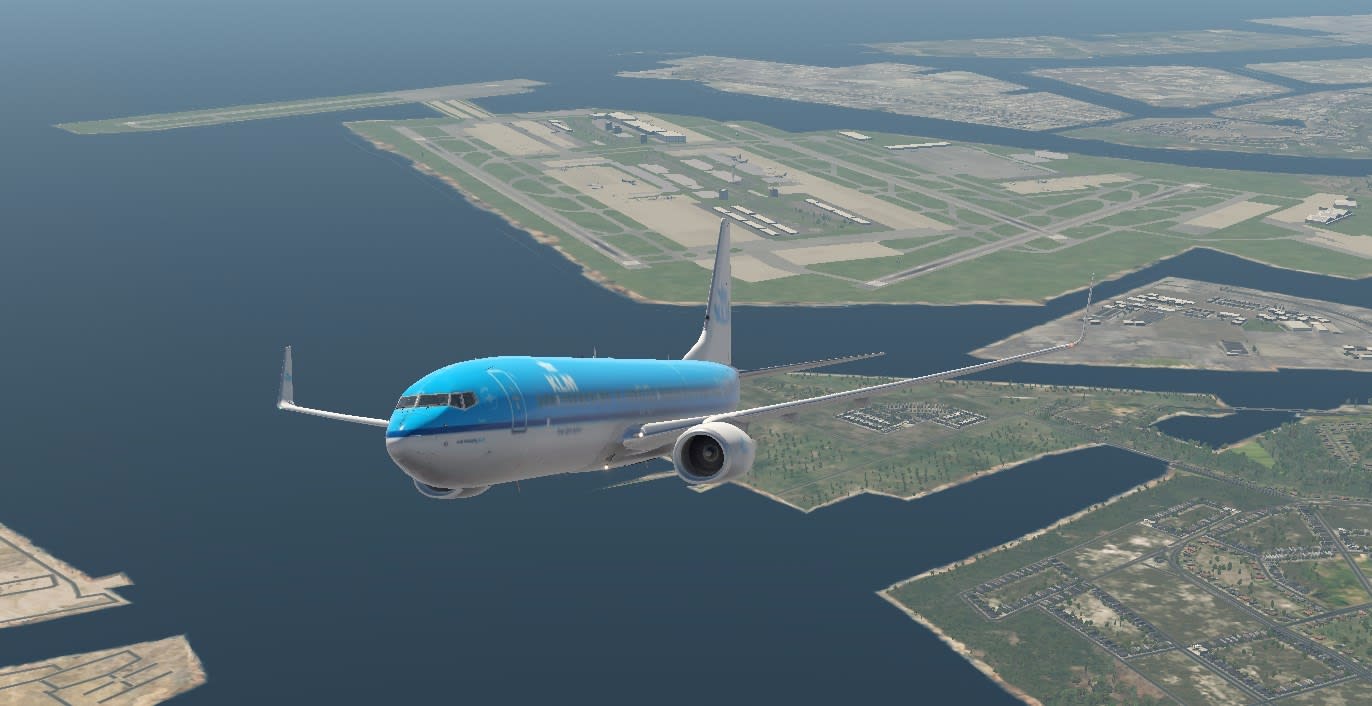
やがて相模湾から富士山が見えてきます。ちなみにほかのブログ記事ではデフォルトのX-Planeのシナリーに高解像度のメッシュシナリーを入れたり、フォトシナリーを入れたり、気象ソフトを起動させたりしていますので表現がもっと細かくてきれいだと思います。

PFDを見てみます。オートスロットルがFMC SPDからMCP SPDに変わりました。そして目標のマッハが0.80で、現在のマッハが下の四角で囲ったところ、0.80となっています。これで安定して飛びます。

経過時間計、離陸後8分です。ロケットのような速さで飛んでいます!
時計の右上をクリックすると現在の時刻が出てきます。特に表示がなければ国際標準時UTCの時刻が出てきます。

CDUのPROG画面を見ます。大阪到着は1時58分予定。ですからあと26分。距離221マイル。その下のT/Dは降下開始地点の意味で、そこまで85マイル、1時43分に到達予定。

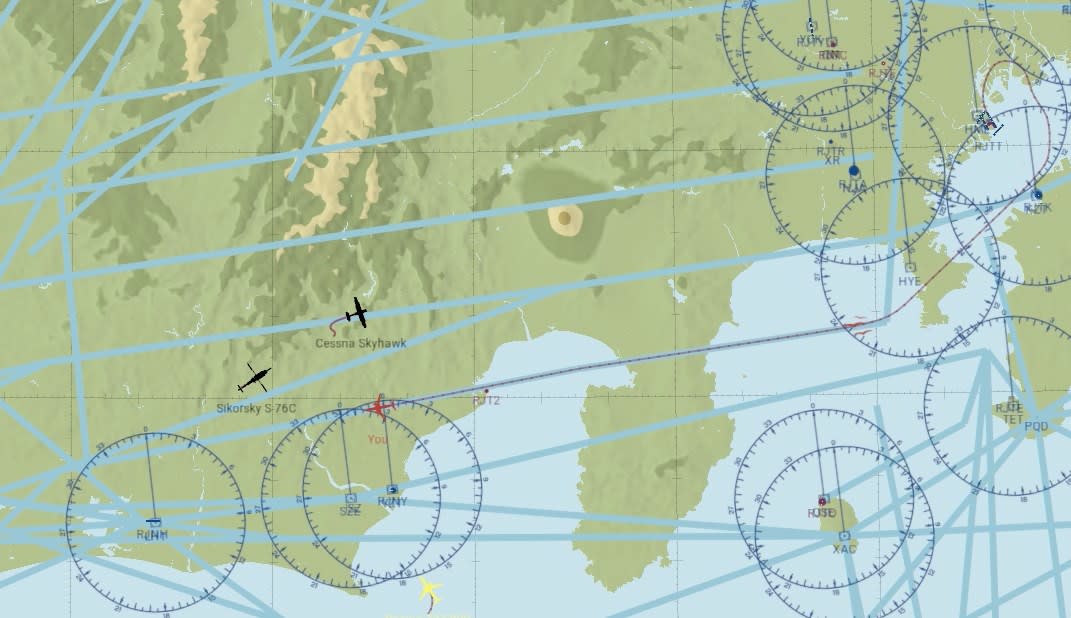
シミュレーター画面の右上にある二重丸をクリックすると地図が出てきます。飛んできたコースが出てきます。
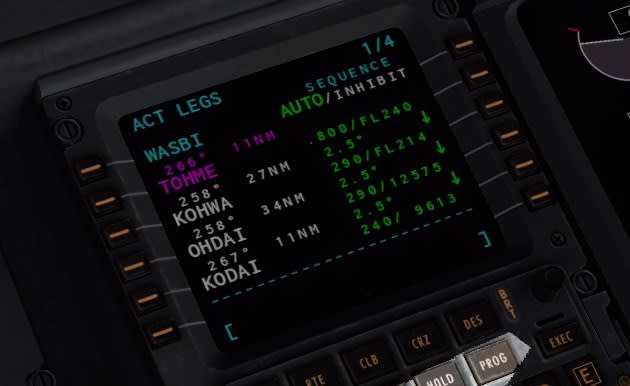
この先ですが、TOHMEを出るとKOHWAまでの間に降下開始になります。下向きの矢印が出ています。
降下が始まったら最終進入開始地点の高度3500フィートまで途中の高度制限を守りながら一気に下りてしまいます。そのためMCPの高度には3500を入れておきます。ただし高度のつまみの下にALT HLDとあってここに緑色のランプがついています。これは現在の高度で水平飛行せよという意味で、上の窓に入れた高度で飛べという意味ではありません。

降下(DES)ページを改めてチェックします。
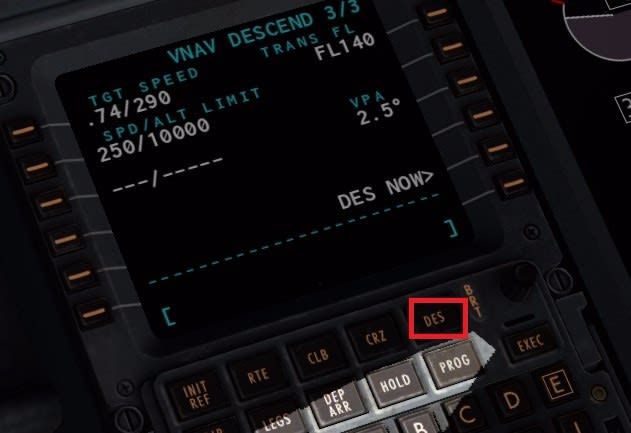
降下速度はFMCの設定どおりにしますので、降下地点が近づいたので改めてVNAVボタンを押します。すると速度の窓の数字が消えます。SPEEDボタンは押したままです。

降下開始地点です。先に設定したようにMCPの高度を現在の高度より下げておけば自動的に降下が始まります。ヨコの制御はLNAVのまま。速度はFMC SPDになり、タテの制御がVNAV PTHになります。VNAV PTHとはFMCが内部で計算した各ポイントの高度をたどって飛ぶという意味で、自動的に計算した降下パスを飛ぶことになります。速度290ノット、降下は3500フィートまで。現在の高度を示す数字の脇に赤枠で囲んだマジェンタの小さいバーが見えますが、これが上昇率、降下率を示すバーで、PFD一番右側の扇形の目盛は1が毎分1000フィート、2が毎分2000フィートの意味で、上側が上昇、下側が降下です。ですから今だいたい毎分300フィートで降下せよとVNAV PTHから指令が出て、そのようにオートパイロットが飛んでいる状態です。

KOHWAまであと18マイル。その高度がFL214ですから現在の高度とあまり差がありません。ですから大変ゆっくり降下しているのです。このあたり、実機ではもっとダイナミックに途中の高度を計算しなおして、もっとサクサク降りていきます。

またND画面の右側に上下のスケールが出てきました。これはVNAV PTHで現在の機の位置が目標とする高度の上にあるか下にあるかを示すもので、マジェンタのひし形が下にあれば目標よりも高い位置に、上にあれば目標よりも低い位置にあることを示します。一方PFDの水平儀の下にあるマジェンタの三角はLNAVの目標とするルートと機の位置の関係を示したものです。真ん中にあれば目標とするルートの真上を飛んでいます。

いま知多半島の手前で、中部国際空港がよく見えます。

KOHWAを過ぎて降下が本格化しました。降下率は毎分1750フィート。LNAVもVNAVもパス上にちょうど乗っています。

VNAV PTHで降下中はMCPの降下率の数字が自動でどんどん動いていきます。触らないようにします。

10000フィートが近づき、240ノットへの減速が始まりました。

240ノットで3500フィートへ降下を続けます。

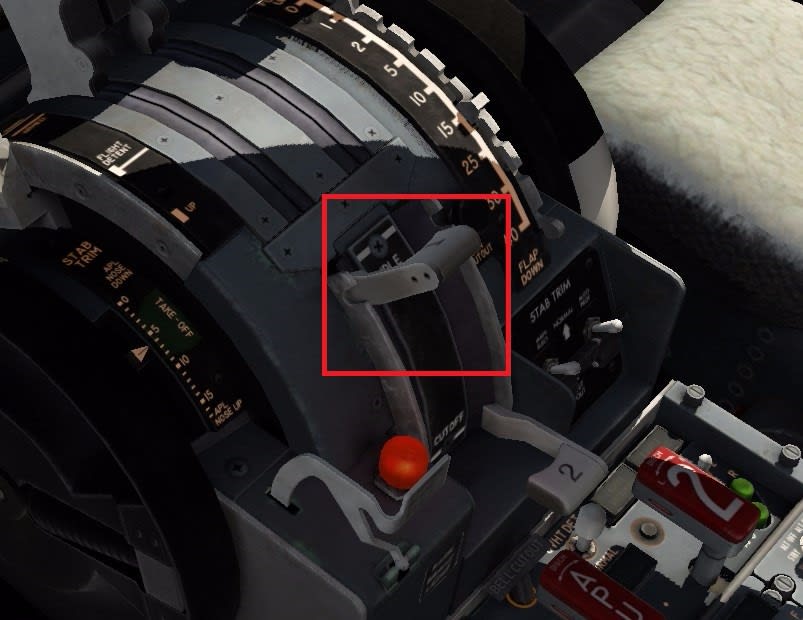
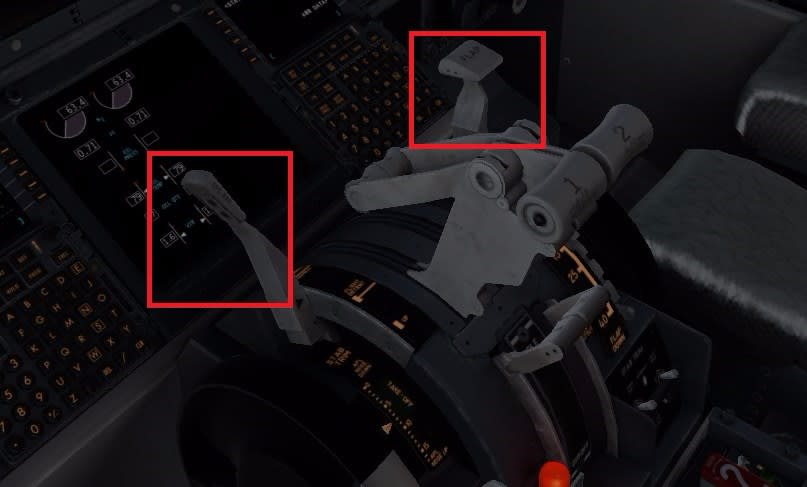
スピードブレーキは着陸前にARMします。すると接地と同時に展開してくれます。しかしこのデフォルトの機体ではARM位置にレバーは動くのですが、手で展開しないと自動では展開しませんでした。

ちょっと引いて上にあげたところがARM位置です。

10000フィートを過ぎたので着陸灯をオン。

奈良の盆地と生駒の山、その先に大阪平野が広がります。

オートブレーキを2に。

右旋回で方位322度、最終進入コースの延長線上に乗ってきました。速度をMCPで指定します。180ノットに減速します。VNAVボタンを押してVNAVを解除し、速度の窓に180を指定します。SPEEDボタンは押したままです。

フラップ5度。

フラップ表示器で確かに5度になっていることを確かめます。

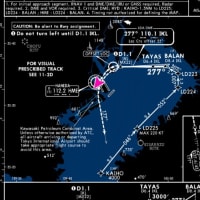
既にILSの周波数と方位は設定してあります。PFD上にはILSのローカライザーとグライドスロープの指示が出ていますので、APPボタンを押してILSの電波に乗って進入していきます。

PFDを見ると水平儀の右と下にひし形が出ています。右が高さを合わせるグライドスロープ、下がヨコを合わせるローカライザーです。ぴったり真ん中に来た時がちょうどコースの上です。いま、タテが本来の位置より上に来ています。オートパイロットで自動的に追随して合わせてくれます。速度は180ノットのまま。水平儀の上の指示を見るとわかりますが、今のところタテはグライドスロープ(G/S)で飛んでいますが、ヨコはまだLNAVで飛んでいます。APPボタンを押してありますからヨコもいずれローカライザーの指示に切り替わります。

速度を150ノットに下げます。

フラップ15度、ギアダウン。ギアの3つのランプが赤の時はロックが外れて動いているとき。これが緑に変わればダウンでロックされた状態です。

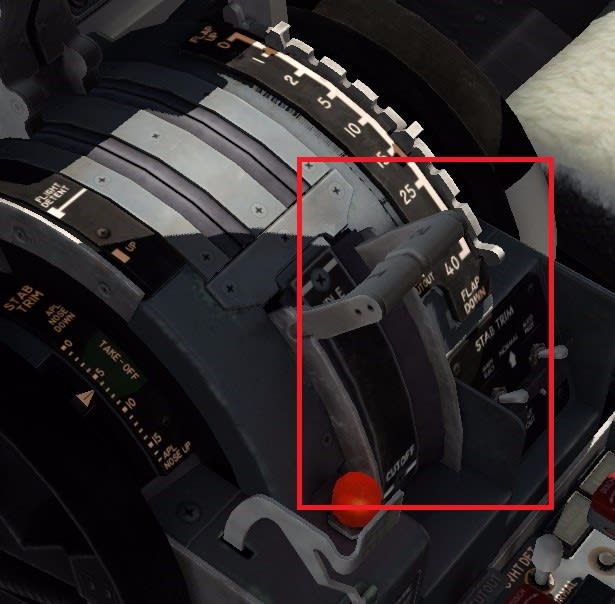
フラップを40度まで下げます。ギアのランプは3つ緑になりました。速度は135ノットまで下げます。

本当はここでNAV2にもILSのの周波数とコースを設定すると、2つのILSを使ってダブルチャンネルで進入着陸をやってくれるはずですが、このデフォルトの機体ではそうはならないようです。
大阪の市街地を見ながら安定して降下していきます。

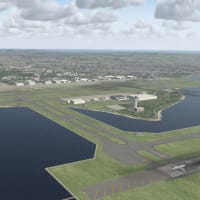
前方に空港が見えてきました。

最終進入が始まったらMCPの高度はゴーアラウンドの高度に合わせておきます。5000フィート。

横方向もローカライザー(LOC)による誘導になりました。そして受信しているILSの識別符号(ISK)、コース(337)、併設されたDMEで測った距離(2.2)が出ています。速度は135ノットで着陸します。着陸まであと2.2マイル。

安定して降下しています。水平儀を見ると2度ぐらい機首上げ姿勢です。降下率は毎分700フィートほど。このまま、オートパイロットもオートスロットルも切らないで着陸しても機体の破損は起きないでしょう。手動の着陸に自信がなければこのまま降りてください。接地したらすぐにオートスロットル、オートパイロットを切って、直ちにスロットルをアイドルまで戻して逆噴射をかけます。逆噴射はスロットルをアイドルまで戻さないとかかりません。
ただし接地してまだエンジンがアイドルでないとなかなか止まりません。ですから接地前にオートスロットルだけ切って接地直前にスロットルをアイドルまで戻したほうが確実です。

オートスロットルを切るところです。

オートパイロットも切って手動で着陸するときは、この白いバーを一度下げてまた上げます。これでオートパイロットが切れます。

無事着陸しました。自動でブレーキがかかります。逆噴射。スピードブレーキが自動で展開しなければ手動で展開させます。

十分に減速しました。逆噴射を戻し、スピードブレーキも戻します。

誘導路に向かいます。

ストロボ灯をオフ。

着陸灯をオフ。ランウエイ・ターンオフライトとタクシー灯をオン。
APUをスタート。

フラップアップ・ゼロ。
トランスポンダをスタンバイに。

フライトディレクター、オートスロットルをオフに。オートパイロットももちろんオフに。

駐機場に到着です。パーキングブレーキをオン。

電源をAPUに切り替えます。APUの2つの電源スイッチをオンに。

メインのエンジンのほうからの電気が切り離されました。
燃料カットオフスイッチをカットオフに。

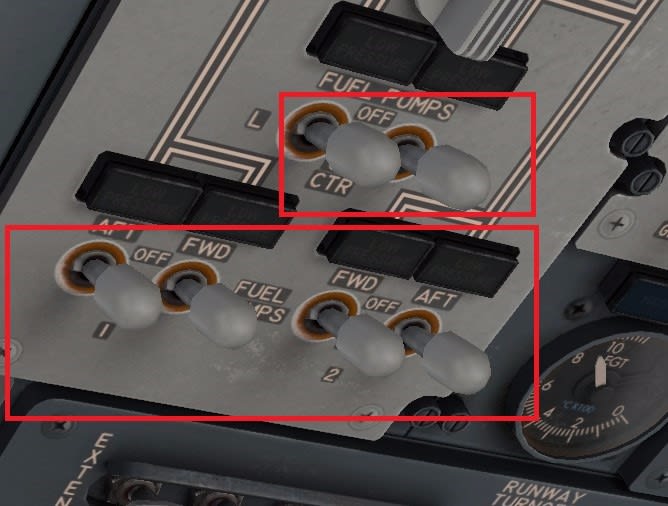
燃料ポンプを全部オフ。
ランウエイ・ターンオフフライトとタクシー灯をオフ。
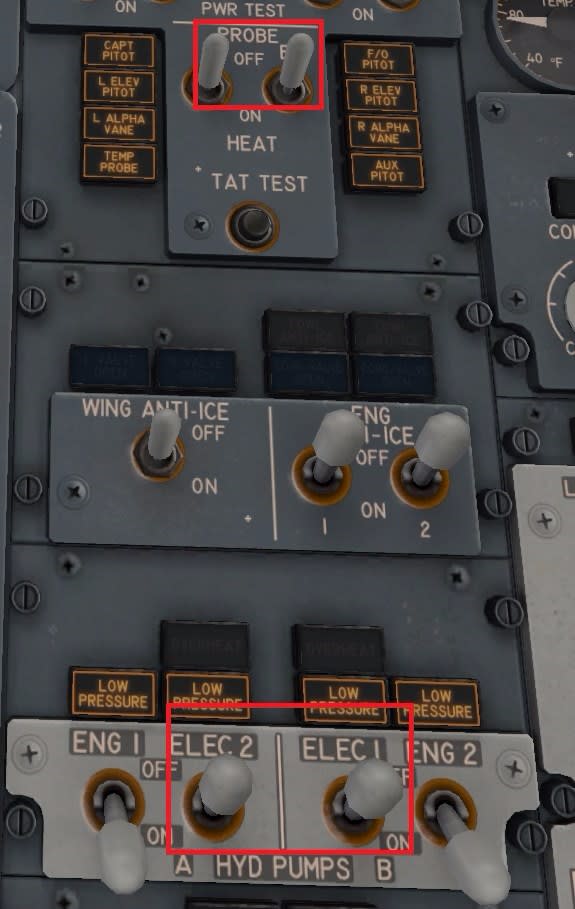
電気で動く油圧ポンプをオフ。プローブヒートをオフ。
APUブリードをオンにして、APUからのエアーを空調に。

衝突防止灯をオフ。

シートベルトサインをオフに。
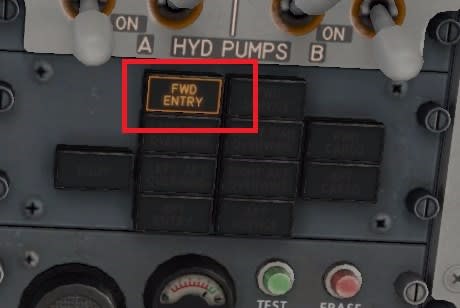
ドアを開けるとドアが開いたことを示す表示が点灯。
降機が始まりました。

経過時間計は着陸したときにオフにしてあります。離陸後36分。

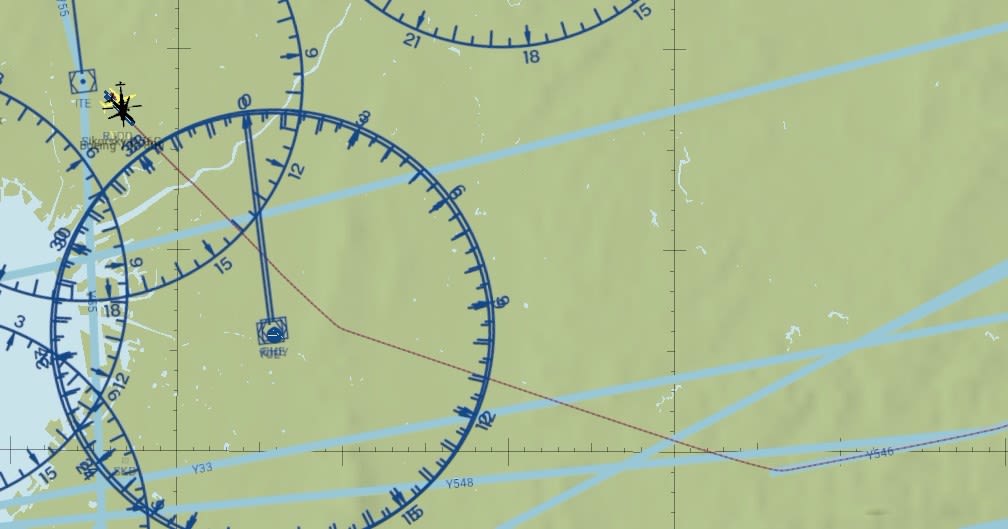
これが降下、進入、着陸で飛んだコースです。
ということでX-Plane11.11のデフォルトのB737-800で羽田から伊丹まで飛びました。制約はありますがそれなりに十分楽しめます。
次はデフォルトのB747-400を飛ばしてみます。これはさらにバグがあったり制約があったりしてB737-800より大変かもしれません。
(おわり)






ただ接地前後の処理が不十分で暴走してしまいました。
着実に停止させる要領を(お手すきの時に)ご教示くだされば幸いです。
どうもありがとうございました。
ブレーキはキーボードのV、Bです
又はジョイスティックに最大ののブレーキを
設定します
ご教示ありがとうございます。
ご教示なんてとんでもございません。
私も満足に飛ばすのに半年位かかりました