こんばんは。今日はウエルカムプラザレポートその2、新しいパーソナルモビリティー篇です。今回はUNI-CUB β、ASIMOの紹介です。スクリーンの説明とかぶるところもありますが...しょうがないです。今日はちょっと長いです。

まずUNI-CUB β。
UNI-CUBにはUNI-CUBとUNI-CUB βの2種類があり、紹介するのはUNI-CUB βです。

移動方法がシンプル。知っている方も多いかと思います。

重心の移動のみで移動できます。

バランス制御にはASIMOなどHonda Roboticsで培われた技術が利用されています。

Honda独自のバランス制御技術。

重心移動で動くことができます。

歩いている人と近い目線です。人と乗り物の調和って感じです。

座りながらこのような移動ができます。

開発のきっかけは社内アイディアコンテスト。

このような変化を重ね現在の形となりました。ここではUX-3と書いてありますがHondaのホームページではU3-Xと書いてありました。これはかなり前にツインリンクもてぎで実演を見ました。ツインリンクもてぎではU3-Xだったので当ブログではU3-Xとします。

UNI-CUBなどはHonda独自の技術、全方位駆動車輪機構というシステムが使われています。

次はASIMO。ASIMOの原点は「人の役に立つロボットを作りたい」という思いから。(あれ?この会社って何の会社だっけ?)

スケッチでは人とコミュニケーションをとっている様子が描かれています。

2本足で歩くというところがポイントですね。

Hondaがまさに今取り組んでいる課題です。

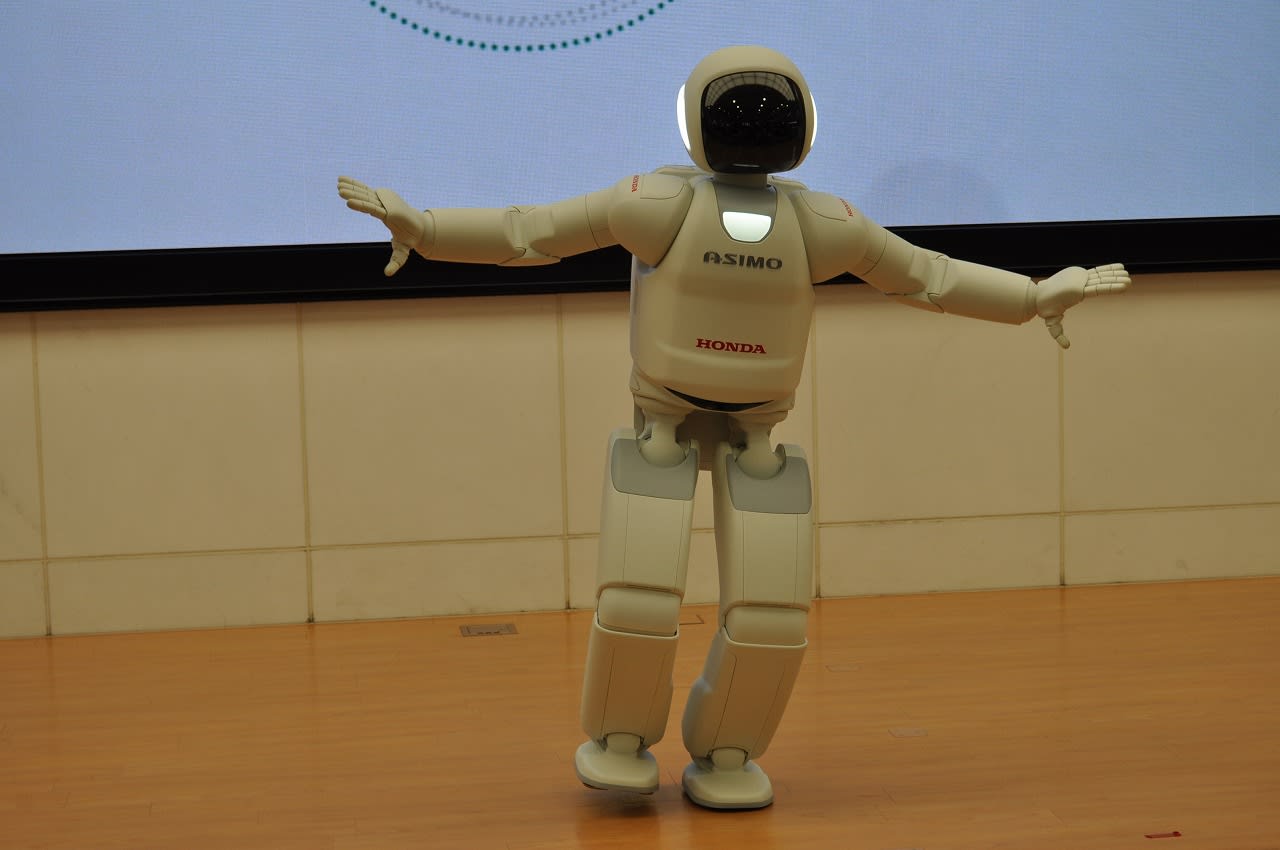
ASIMO登場!

素晴らしいバランスです。

横を向きつつ前に進む。すごいですね。

ステージ中央まで来ました。

2足歩行ロボットの歩みをASIMOが紹介。

脚だけのロボットから胴体もあるロボットに。

コンパクトですね~。

モノに手が届くけど人と調和できる大きさです。

走れます。因みに”走る”の定義は両足が宙に浮いている時間があるということです。両足が浮いている瞬間は撮れませんでした...。残念...。

ジャンプ。両足が浮いてもバランスが取れます。こちらは両足が浮いたところを撮れました。
すごいですね...。

手話もできます。

Hondaのロボット技術、すごいですね。赤丸で囲まれている高所調査用ロボットですが、これは福島第一原子力発電所での調査に使われています。まさに「技術は人のために」です。

デモンストレーションの後、記念撮影ができます。
この会社って何の会社なんだろうという疑問を抱かざるを得ないw。クルマ、バイク、ロボット、ジェット機、ジェットエンジン、発電機、耕うん機、船外機を作り、横にアスレチックのあるサーキットや博物館を所有し、F1をはじめとするモータースポーツに参加。こんな幅広く手を出す会社が他にあろうか、いや、あるはずがない(反語)。
にほんブログ村、ブログランキングに参加しています。クリックして頂けるとありがたいです。
 にほんブログ村
にほんブログ村 飛行機 ブログランキングへ
飛行機 ブログランキングへ
まずUNI-CUB β。
UNI-CUBにはUNI-CUBとUNI-CUB βの2種類があり、紹介するのはUNI-CUB βです。
移動方法がシンプル。知っている方も多いかと思います。
重心の移動のみで移動できます。
バランス制御にはASIMOなどHonda Roboticsで培われた技術が利用されています。
Honda独自のバランス制御技術。
重心移動で動くことができます。
歩いている人と近い目線です。人と乗り物の調和って感じです。
座りながらこのような移動ができます。
開発のきっかけは社内アイディアコンテスト。
このような変化を重ね現在の形となりました。ここではUX-3と書いてありますがHondaのホームページではU3-Xと書いてありました。これはかなり前にツインリンクもてぎで実演を見ました。ツインリンクもてぎではU3-Xだったので当ブログではU3-Xとします。
UNI-CUBなどはHonda独自の技術、全方位駆動車輪機構というシステムが使われています。
次はASIMO。ASIMOの原点は「人の役に立つロボットを作りたい」という思いから。(あれ?この会社って何の会社だっけ?)
スケッチでは人とコミュニケーションをとっている様子が描かれています。
2本足で歩くというところがポイントですね。
Hondaがまさに今取り組んでいる課題です。
ASIMO登場!
素晴らしいバランスです。
横を向きつつ前に進む。すごいですね。
ステージ中央まで来ました。
2足歩行ロボットの歩みをASIMOが紹介。
脚だけのロボットから胴体もあるロボットに。
コンパクトですね~。
モノに手が届くけど人と調和できる大きさです。
走れます。因みに”走る”の定義は両足が宙に浮いている時間があるということです。両足が浮いている瞬間は撮れませんでした...。残念...。
ジャンプ。両足が浮いてもバランスが取れます。こちらは両足が浮いたところを撮れました。
すごいですね...。
手話もできます。
Hondaのロボット技術、すごいですね。赤丸で囲まれている高所調査用ロボットですが、これは福島第一原子力発電所での調査に使われています。まさに「技術は人のために」です。
デモンストレーションの後、記念撮影ができます。
この会社って何の会社なんだろうという疑問を抱かざるを得ないw。クルマ、バイク、ロボット、ジェット機、ジェットエンジン、発電機、耕うん機、船外機を作り、横にアスレチックのあるサーキットや博物館を所有し、F1をはじめとするモータースポーツに参加。こんな幅広く手を出す会社が他にあろうか、いや、あるはずがない(反語)。
にほんブログ村、ブログランキングに参加しています。クリックして頂けるとありがたいです。