








モーター2個でダブルギアボックスを駆動
今回はモーター2個で、「TAMIYA」のダブルギアボックスを駆動し、同じく「TAMIYA」のトラック&ホイールセットに取り付けてクローラー(無限軌道)を作ります。
ダブルギアボックス(左右独立4速タイプ)は、左右のギアボックスが独立しておりそれぞれにモーターを取り付けます。
そのことにより左右の速度を変えたり、方向を変えることが可能となります。
速度はギアの組み合わせを変えることによりは高速から低速まで4種類あり、今回は低速側の「C」を選びました。
速度Cタイプ ギア比 114.7 : 1
回転トルク 809gf・cm
回転数 115rpm
クローラーの組み立て
組み立てには「TAMIYA]のユニバーサルプレート2枚を使用し、ダブルギアボックス・トラック&ホイールセットを取り付けました。
2枚のユニバーサルプレートは上下に重ね、間隔はダブルギアボックスと電池ホルダー(単三4本・006P)が間に収まるようにします。
ダブルギアボックスの回転方向は、モーターの回転方向が同じであれば逆方向になってしまいますので、どちらか一方のモーターの配線を逆接続にします。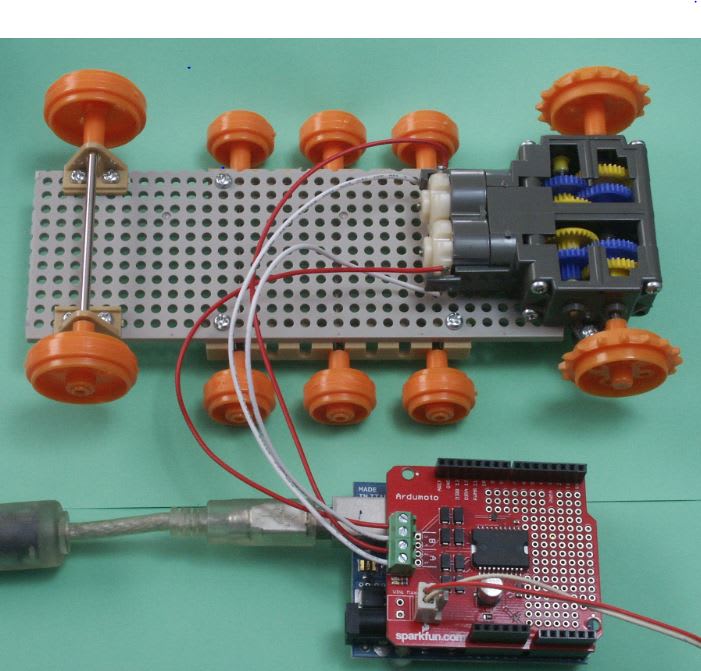


Arduino基板とArdumoto基板をクローラー上部に取り付け。
配線
スケッチ
前進、後退を交互に繰り返す。
//モーターピン設定
int pwm_a = 3;
int dir_a = 12;
int pwm_b = 11;
int dir_b = 13;
void setup()
{
//ピンモード設定
pinMode(pwm_a, OUTPUT);
pinMode(dir_a, OUTPUT);
pinMode(pwm_b, OUTPUT);
pinMode(dir_b, OUTPUT);
}
void loop()
{
//正方向回転セット
digitalWrite(dir_a, LOW);
digitalWrite(dir_b, LOW);
//回転数(100/255 39%セット)
analogWrite(pwm_a, 100);
analogWrite(pwm_b, 100);
delay(5000);
//逆回転セット
digitalWrite(dir_a, HIGH);
digitalWrite(dir_b, HIGH);
//回転数(100/255 39%セット)
analogWrite(pwm_a, 100);
analogWrite(pwm_b, 100);
delay(5000);
}















※コメント投稿者のブログIDはブログ作成者のみに通知されます