









9月9日に石巻市(宮城県)で行われた全日本ロボット相撲 東北大会の報告です。
“負け犬になりました”では報告責任を果したとは言えないので、ここで責務を果そうかと。
全日本ロボット相撲大会は北海道から九州までの9箇所で地方大会が行われ、各地区の上位進出者が全国大会に出場できるようになっています。
東北大会は時期が早いので強豪が多いのですが、全国出場枠が6台と多いのが特徴です。
自分の試合順は第1回戦が16試合目とかなり遅く、時間に余裕がありのんびりと準備することができたのは幸い。
結果は1回戦敗退でした。
この相手ロボットの学校の別のロボット(とはいっても同型)に後輩も敗れました。
去年はここまで強かったとこではなかったようなのですが、この1年で大きなブレイクスルーでもあったのか、かなり強いロボットを作って参加していました。

1本目の試合開始直後の様子。
左が自分のロボット、右が対戦相手のロボットです。
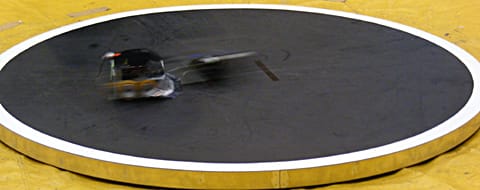
で、次の瞬間。
写真のブレ具合で自分と相手のロボットの速度差がわかるんじゃないかと。
相手のロボットは相当な速度でした(恐らく3.5m/s以上)。
相手ロボットのブレードが自分のロボットの下に食い込んでいます。
この時に自分のブレードはダメージを受けて曲がってしまっています。
そしてこのまま自分のロボットは土俵外へ。
まさに瞬殺。

1本目でブレードが変形してしまいましたが、それを直す間もなく2本目。
相手のロボットが相当な高速型のロボットに対して、自分のロボットはパワー型。
押し合いになれば何とかなる・・・かなぁ?と思いつつ試合開始。

2本目は斜めから回り込まれて土俵外へ。
こちらも瞬殺でした。
結果、試合時間が2本合わせても5秒に満たない、一方的な敗退。
負けた悔しさを感じるよりも、素直に相手のロボットを凄いと感じました。
また、同時に自分のロボットのマズイ点を痛感したり。
自機の問題点(敗因)を列挙すると次の通り。
行動ルーチン
まず1点目。
今回の自機のルーチンは非常に単純で、前方のセンサが反応したら前進、左右のセンサが反応したら左右に旋回、センサの反応がなかったら停止という簡単なものでした。
で、一番マズかったのがセンサが反応しないと動かないこと。
今回は相手のロボットが非常に高速であったため、センサが反応し、動き出す前に押し出されています。
これが仮にセンサの反応がないときは前進するといった動作だった場合、相手に一方的に押し出されることは無かったんじゃないかと思います。
また今回の場合、ロボットを土俵上に置く際、初期位置で正面のセンサが反応するように土俵上に自機を置けばまた少しは違った試合展開になったんじゃないかと思います。
なお、センサの反応が無いときに動かないのは、自爆防止のため。
今回は土俵端を検出するセンサを搭載できなかったのでこのようなルーチンになっています。
これも次回までの課題でしょう。
“いのちだいじに”じゃなくて“ガンガンいこうぜ”ってことですね。
ブレード
2点目。
実は一番やっかいな問題。
そもそもブレードとは、ロボットの先端に取り付けられていて、相手を土俵上から剥がす為のものです。
というのも、土俵が鋼板なのでロボットは磁石で張り付くことが一般的になっています。
そのため、単純な押し合いで勝負を決することは難しくなっています。
そこで相手ロボットの下に潜り込み、土俵とロボット(磁石)を引き剥がすのがブレードです。
なのでブレードは勝敗を決するための非常に重要な要素と言えます。
ブレードには刃物が使用されることが多いのですが、その中でも近年かなり多く使用されているのがハイスです。
ハイスとは(High Speed Steel)の略で主に工作機械の刃物に使われている材質です。
非常に硬く、鋭いのですが、普通の工作機械では加工することが非常に困難なのが特徴。
まぁ、金属を加工するために作られた鋼が、普通の工作機械で加工できたら意味ありませんし・・・。
ちなみに自分の後輩達もハイスを使用しています。
今回、自分はリボン鋼(厚さ0.3mm)を砥いで使用しました。
リボン鋼は加工が容易で安価なのですが、強度はそんなに高くありません。
で、ハイスとやりあった結果がこのザマ。
一番単純な対処法としては、目には目を、刃には刃をということでハイスを使用すること。
ま、実際にはそんな単純でもないんですが、確実に効果はあると思います。
しかし、そこで問題になるのが自分の懐事情。
というのも、ハイスブレードって高いんです!
刃1枚で軽く¥5,000以上します。
勝とうと思うなら金をかけるべきなんでしょうが、自分には無理、だなぁ・・・。
ハイスブレードとフィギュア、どちらをとるかと問われれば、自分は確実に後者を選びます。
・・・現状では。
ということで、何とかする方法を考えないとなぁ・・・。
磁石
3点目。
このロボットには比較的強力な磁石が取り付けられてはいますが、その配置に問題があるかな、と。
現状ではグリップを稼ぐために車軸と同一線上に配置されています。これで十分だと思ってたりもしたんですが、実際には不十分でした。
というのもブレード部分に磁石がないので、グリップを稼いでパワーを土俵に伝えることができても、ブレード部分がしっかり密着していない状態なので簡単にブレードごと剥がされてしまいます。
この問題はブレード部分に磁石を埋め込むことで対処できるので、比較的簡単で効果の高い改修じゃないかと思います。
とりあえず思いつく問題はこれくらいでしょうか。
実はもっと別の敗因が隠れているかもしれませんが、まずは分かっている範囲で1個ずつ確実に潰していこうかと。
やってみなきゃわからないしな。
次は30日に名古屋で行われる東海大会に参加します。
それまでに、最低限今回判明した欠点を修正しないといけないし、きっとそれだけでも不十分だと思うので更なる工夫を凝らす必要もあるかと。
時間あるかなぁ・・・。
応援してくれた方にはこんな結果で申し訳無く思います。
しかし、まだチャンスがある以上、次こそはもっとマシな試合をしたいと思います。
負け惜しみでもなんでもなく、勝つことが目的ではないので。
目的は楽しむこと。
自分にとって重要なのはそこですから。
今回みたいな試合じゃ“楽しかった”なんて言えないし・・・。
次こそは・・・!
以上、簡単ですが東北大会の報告でした。









