Raspberry Pi Pico MicroPythonの組み合わせで、3チャンネルクロックジェネレータSi5351Aを使った7MHz VFOを作ってみました。
Si5351 VFOは、これまでPIC,Arduino,STM32,ESP32などで何度も作りました。Si5351Aをコントロールする実験は、JH7UBCホームページの
Arduinoのページに詳しく掲載していますので、そちらをご覧ください。
Raspberry Pi Picoでこれまでテストしてきた各デバイスのスクリプトを組み合わせて今回のスクリプトを作りました。
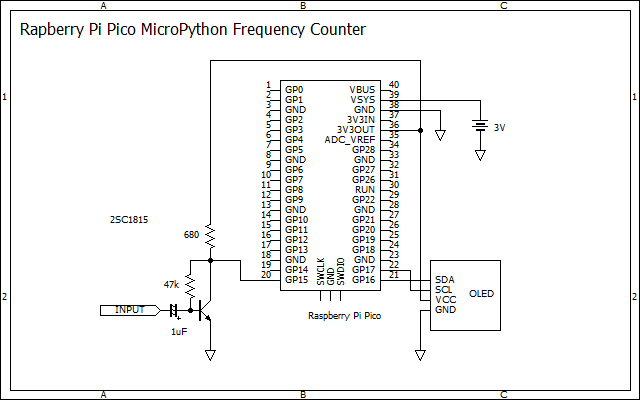
回路図です。I2Cは、id=0,sda=Pin16,scl=Pin17とし、Si5351AとOLEDをコントロールします。VFO出力は、SI5351AのCLK0です。ロータリーエンコーダは、GPIO0とGPIO1に接続します。周波数STEPスイッチは、GPIO15に接続し、GPIO0,1,15は内部でプルアップします。
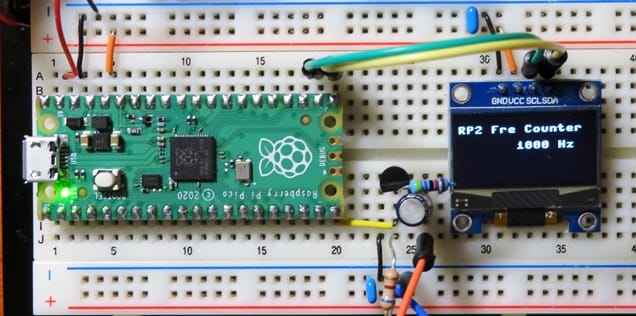
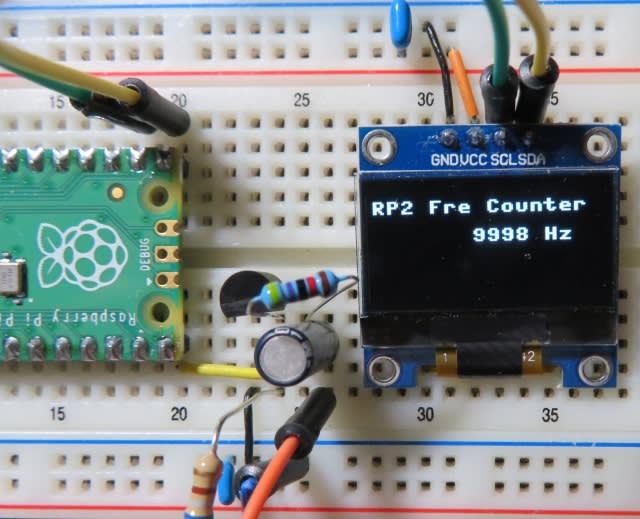
ブレッドボードです。
周波数カウンタを接続して、動作を確認しています。期待通りの動作をしました。
スケッチです。(ちょっと長いです。)Si5351Aは個体により若干の周波数のずれがあります。その補正は、dFの値とCrystal Load Capacitanceの値で行います。周波数STEPは、10K→1K→100→10→1Kと押すたびに変更され、循環します。なお、OLEDを使いますので、ssd1306ライブラリーをPicoにインストールしておきます。このスクリプトは、main.pyとしてPicoに保存します。
--------------------------------------------------------------------------------------------
"""
Si5351A test
7MHz VFO OUTPUT CLK0
2021.12.8
JH7UBC Keiji Hata
"""
from machine import I2C,Pin
import ssd1306
import utime
i2c=I2C(0,sda=Pin(16),scl=Pin(17),freq=400000)
oled=ssd1306.SSD1306_I2C(128,64,i2c)
step_sw=Pin(15,Pin.IN,Pin.PULL_UP)
pinA = Pin(0,Pin.IN,Pin.PULL_UP)
pinB = Pin(1,Pin.IN,Pin.PULL_UP)
#Di5351A関係定義
Si5351A_ADDR = 0x60
MSNA_ADDR = 26
MSNB_ADDR = 34
MS0_ADDR = 42
MS1_ADDR = 50
MS2_ADDR = 58
CLK0_CTRL = 16
CLK1_CTRL = 17
CLK2_CTRL = 18
OUTPUT_CTRL = 3
XTAL_LOAD_C = 183
PLL_RESET = 177
XtalFreq = 25000000
df = -62 #周波数補正値
denom = 1048575
frequency = 7000000 #周波数初期値
frequency_old = frequency
step = 10000 #step初期値
old_fH=""
old_fM=""
old_fL=""
f_Max = 7200000 #周波数最大値
f_Min = 7000000 #周波数最小値
#Rotary Encoder関係定義
befDat=0x11
curDat=0
count=0
buf = bytearray(2)
def Si5351_write(reg,data):
buf[0] = reg
buf[1] = data
i2c.writeto(Si5351A_ADDR,buf)
#Si5351A initialize
def Si5351_init():
Si5351_write(OUTPUT_CTRL,0xFF)#Disable Output
Si5351_write(CLK0_CTRL,0x80) #CLK0 Power down
Si5351_write(CLK1_CTRL,0x80) #CLK1 Power down
Si5351_write(CLK2_CTRL,0x80) #CLK2 Power down
Si5351_write(XTAL_LOAD_C,0x40)#Crystal Load Capacitance=6pF
Si5351_write(PLL_RESET,0xA0) #Reset PLLA and PLLB
Si5351_write(CLK0_CTRL,0x4F) #CLK0 Power up 8mA
# Si5351_write(CLK1_CTRL,0x4F) #CLK1 Power up 8mA
# Si5351_write(CLK2_CTRL,0x4F) #CLK2 Power up 8mA
Si5351_write(OUTPUT_CTRL,0xFE)#Enable CLOK0
def PLLA_set(freq):
global XtalFreq,divider,df,denom
freq += df #df=周波数補正値
divider = int(900000000 / freq)
divider >> 1 #dividerは整数かつ偶数
divider << 1
PllFreq = divider * freq
mult = PllFreq // XtalFreq
l = PllFreq % XtalFreq
f = l * denom
num = f // XtalFreq
P1 = int(128 * (num / denom))
P1 = 128 * mult + P1 - 512
P2 = int(128 * (num / denom))
P2 = 128*num - denom * P2
P3 = denom
Si5351_write(MSNA_ADDR + 0,(P3 & 0x0000FF00) >> 8) #MSNA_P3[15:8]
Si5351_write(MSNA_ADDR + 1,(P3 & 0x000000FF)) #MSNA_P3[7:0]
Si5351_write(MSNA_ADDR + 2,(P1 & 0x00030000) >> 16) #MSNA_P1[17:16]
Si5351_write(MSNA_ADDR + 3,(P1 & 0x0000FF00) >> 8) #MSNA_P1[15:8]
Si5351_write(MSNA_ADDR + 4,(P1 & 0x000000FF)) #MSNA_P1[7:0]
Si5351_write(MSNA_ADDR + 5,((P3 & 0x000F0000) >> 12) | ((P2 & 0X000F0000) >> 16))#MSNA_P3[19:16]MSNA_P2[19:16]
Si5351_write(MSNA_ADDR + 6,(P2 & 0x0000FF00) >> 8) #MSNA_P2[15:8]
Si5351_write(MSNA_ADDR + 7,(P2 & 0x000000FF)) #MSNA_P2[7:0]
def MS0_set():
global divider
P1=128*divider-512
P2=0
P3=1
Si5351_write(MS0_ADDR + 0,(P3 & 0x0000FF00) >> 8) #MS0_P3[15:8]
Si5351_write(MS0_ADDR + 1,(P3 & 0x000000FF)) #MS0_P3[7:0]
Si5351_write(MS0_ADDR + 2,(P1 & 0x00030000) >> 16) #MS0_P1[17:16]
Si5351_write(MS0_ADDR + 3,(P1 & 0x0000FF00) >> 8) #MS0_P1[15:8]
Si5351_write(MS0_ADDR + 4,(P1 & 0x000000FF)) #MS0_P1[7:0]
Si5351_write(MS0_ADDR + 5,((P3 & 0x000F0000) >> 12) | ((P2 & 0X000F0000) >> 16))#MS0_P3[19:16]MS0_P2[19:16]
Si5351_write(MS0_ADDR + 6,(P2 & 0x0000FF00) >> 8) #MS0_P2[15:8]
Si5351_write(MS0_ADDR + 7,(P2 & 0x000000FF)) #MS0_P2[7:0 Si5351_init()
#周波数表示
def Freq_Disp(freq):
global old_fH,old_fM,old_fL
fre_txt = str(freq)
fH=fre_txt[0]
if fH != old_fH:
oled.fill_rect(28,16,8,8,0)
oled.show()
oled.text(fH,28,16)
oled.show()
old_fH=fH
fM=fre_txt[1:4]
if fM != old_fM:
oled.fill_rect(44,16,24,8,0)
oled.show()
oled.text(fM,44,16)
oled.show()
old_fM=fM
fL=fre_txt[4:]
if fL != old_fL:
oled.fill_rect(73,16,24,8,0)
oled.show()
oled.text(fL,76,16)
oled.show()
old_fL=fL
#STEP表示
def Step_Disp():
global step
oled.fill_rect(24,52,32,8,0)
oled.show()
if step == 10000:
oled.text(" 10K",24,52)
elif step == 1000:
oled.text(" 1K",24,52)
elif step == 100:
oled.text(" 100",24,52)
elif step == 10:
oled.text(" 10",24,52)
oled.show()
#STEP変更
def Step_Change():
global step
utime.sleep_ms(10)
if step == 10:
step = 10000
else:
step //= 10
Step_Disp()
while step_sw.value() == 0:
utime.sleep_ms(10)
#周波数変更
def Freq_Change():
global frequency
PLLA_set(frequency)
MS0_set()
Freq_Disp(frequency)
#回転方向判定
def hantei(p):
global curDat,befDat,count
global frequency,step
global f_Max,f_Min
curDat=pinA.value() + (pinB.value()<<1)
if curDat != befDat:
D = ((befDat<<1)^curDat)&3
if D<2:
count = count + 1
else:
count = count - 1
befDat = curDat
if count >= 3:
frequency += step
count=0
elif count <= -3:
frequency -= step
count=0
if frequency >= f_Max:
frequency = f_Max
if frequency <= f_Min:
frequency = f_Min
#周波数初期値設定
Si5351_init()
PLLA_set(frequency)
MS0_set()
#初期画面設定
oled.text("RP2 7MHz VFO",16,0)
oled.rect(24,12,80,16,1)
oled.text(" . .",28,16)
oled.text("STEP",24,40)
oled.text(" 10K",24,52)
oled.show()
Freq_Disp(frequency)
#ピン状態変化割込み設定
pinA.irq(trigger=Pin.IRQ_FALLING|Pin.IRQ_RISING,handler=hantei)
pinB.irq(trigger=Pin.IRQ_FALLING|Pin.IRQ_RISING,handler=hantei)
#loop
while True:
if step_sw.value() == 0:
Step_Change()
if frequency != frequency_old:
Freq_Change()
frequency_old = frequency
utime.sleep_ms(10)
--------------------------------------------------------------------------------------------
今回は、周波数を7MHzとしましたが、このプログラムで500KHz~150MHz の周波数を発生させることができます。