PIC16F18326が内蔵しているFVR(Fixed Voltage Reference 低電圧リファレンス)のテストをします。
FVRの構成です。(説明書より)
bufferが2つあり、buffer1がADC用、buffer2がComperators and DAC用です。それぞれGainを1x,2x,4xに設定できます。
今回はADC用のプラス電源としてFVRを利用してみます。
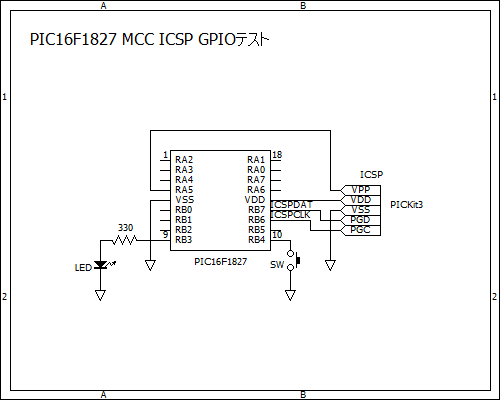
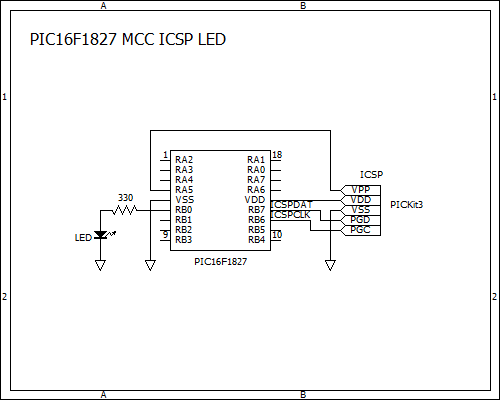
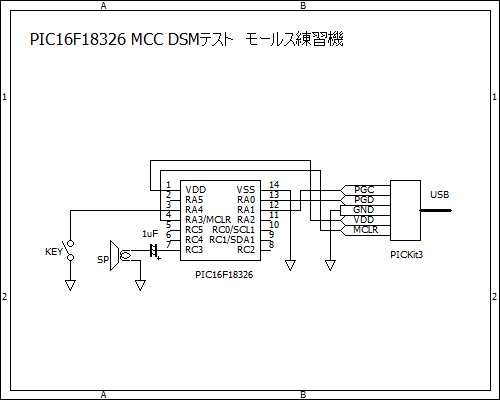
テストする回路です。
VDDをボリュームで調整して、その電圧をRC3からADCに入力し、変換値をI2C LCD1602に1secごとに表示します。
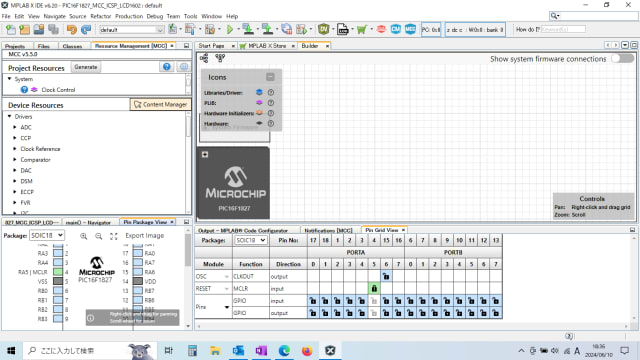
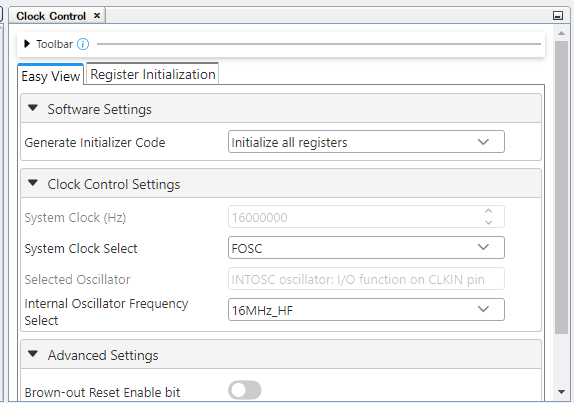
プロジェクトを作成し、MCCを立ち上げ、各種設定を行います。
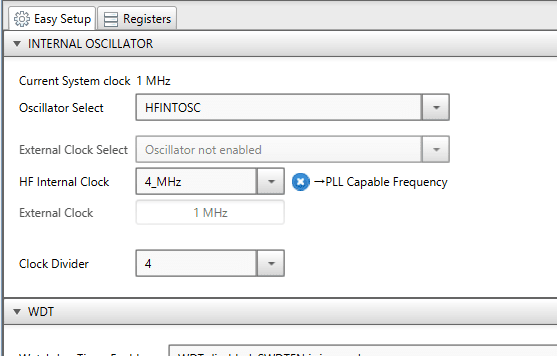
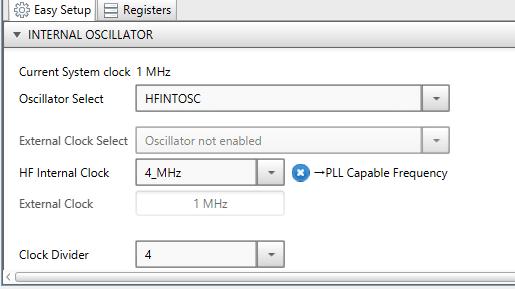
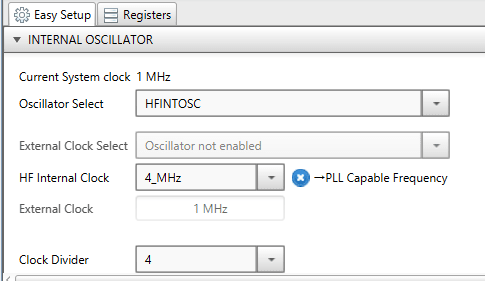
systemモジュールです。デフォルトのままで、クロックは1MHzです。
FVAR,ADC,MSSP1モジュールを導入して、それぞれ設定します。
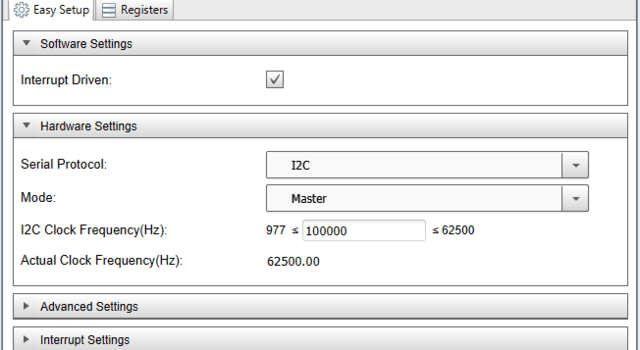
表示用にI2C LCD1602を使いますので、MSSP1モジュールをI2C Masterモードに設定します。
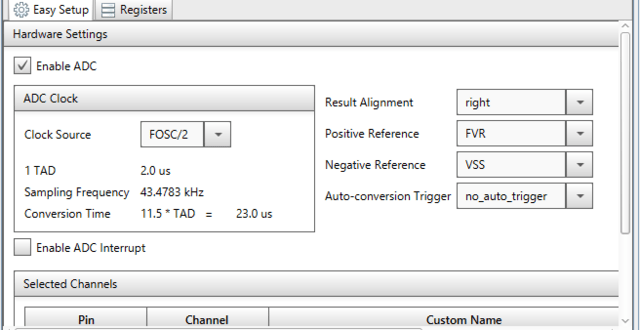
ADCモジュールです。Result Alignmentをrightに、Positive ReferenceをFVRに設定します。
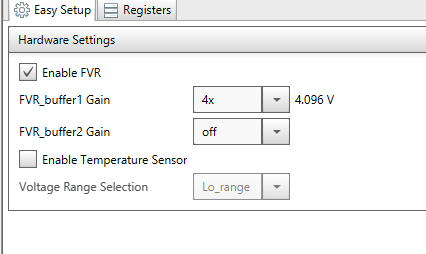
FVRモジュールです。
FVR_buffer1 Gainを4x 4.096Vに設定します。
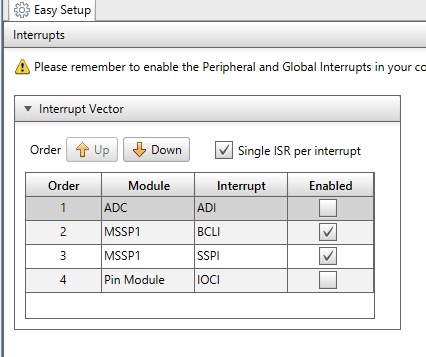
Interruputモジュールです。I2Cで割り込みを使います。
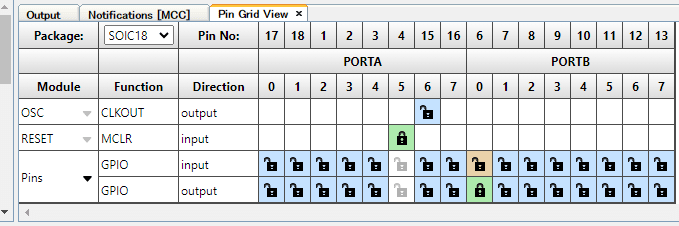
pinモジュールです。
ADCのinputはRC3に設定します。
I2CのSCL1はRC0に、SDA1はRC1に設定します。
以上の設定をして、Generateして、main.cのプログラムを次のように書きました。
------------------------------------------------
/*
* PIC16F18326 MCC FVR test
* 2024.02.08
* JH7UBC Keiji Hata
*/
#include "mcc_generated_files/mcc.h"
#include "mcc_generated_files/examples/i2c1_master_example.h"
#define I2C_LCD_addr 0x27
#define LCD_EN 0b00000100//Enable
#define LCD_BL 0b00001000//Back Light
#define LCD_CMD 0x00
#define LCD_CHR 0x01
#define LCD_LINE1 0x80
#define LCD_LINE2 0xC0
//I2C LCDに1byteのdataを書き込む
void I2C_write_data(uint8_t data){
I2C1_Write1ByteRegister(I2C_LCD_addr, (data | LCD_EN | LCD_BL),(data | LCD_BL));
__delay_us(100);
}
//I2C LCDにコマンドまたは文字を送る
void LCD_write(uint8_t data, uint8_t mode){
//上位4bitを送る
I2C_write_data((data & 0xF0) | mode);
//下位4bitを送る
I2C_write_data(((data << 4) & 0xF0) | mode);
}
//I2C LCD 初期化
void LCD_init(){
__delay_ms(40);
LCD_write(0x33,LCD_CMD);//8bit mode set 2回
LCD_write(0x32,LCD_CMD);//8bit mode set 1回,4bit mode set
LCD_write(0x06,LCD_CMD);//Entry mode set
LCD_write(0x0C,LCD_CMD);//display ON,cursor OFF,blink OFF
LCD_write(0x28,LCD_CMD);//Function set 4bit mode,2line
LCD_write(0x01,LCD_CMD);//Clear display
__delay_ms(1);
}
void LCD_clear(){
LCD_write(0x01,LCD_CMD);
__delay_ms(1);
}
void LCD_home(){
LCD_write(0x02,LCD_CMD);
__delay_ms(1);
}
void LCD_cursor(uint8_t x,uint8_t y){
if(y == 0){
LCD_write(LCD_LINE1 + x,LCD_CMD);
}
if(y == 1){
LCD_write(LCD_LINE2 + x,LCD_CMD);
}
}
//文字列の表示
void LCD_str(char *str){
while(*str)
LCD_write(*str++,LCD_CHR); //pointer increment
}
//1文字表示
void putch(char ch){
LCD_write(ch,LCD_CHR);
}
void main(void)
{
// initialize the device
SYSTEM_Initialize();
// Enable the Global Interrupts
INTERRUPT_GlobalInterruptEnable();
// Enable the Peripheral Interrupts
INTERRUPT_PeripheralInterruptEnable();
LCD_init();
printf("FVR & ADC TEST");
LCD_cursor(12,1);
int data = 0;
while (1)
{
data = ADC_GetConversion(19);
LCD_cursor(5,1);
printf("%5d",data);
__delay_ms(1000);
}
}
------------------------------------------------
putch()関数を定義して、printf()関数を使いますので、Project Propertiesの C standardは、C90に設定しました。
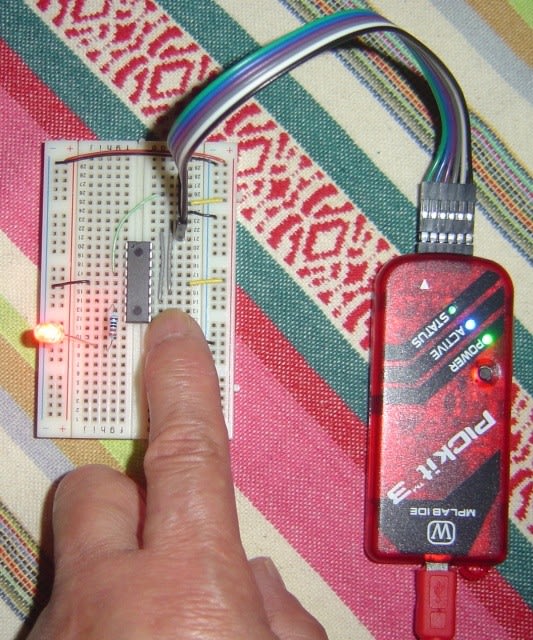
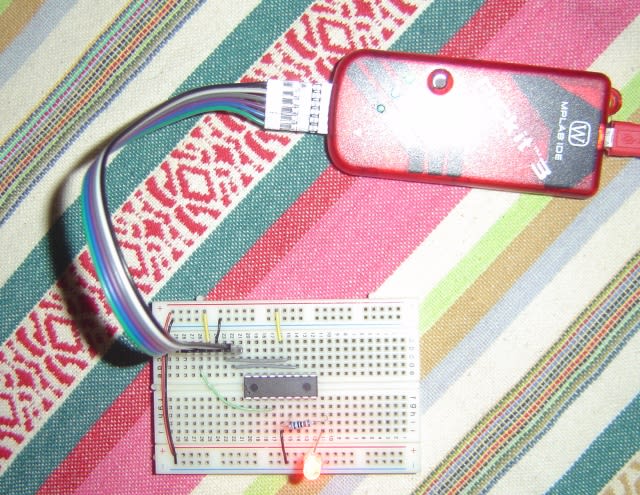
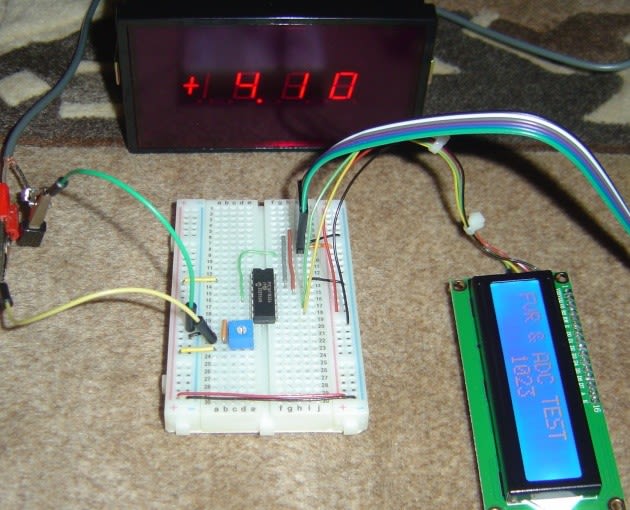
ブレッドボードです。
10kΩのボリュームを回すとその電圧に対してADCの値がLCDに表示されます。
FVRのGainをx4に設定しましたので、電圧0~4.096Vの値がADCで変換されて0~1023の値で表示されます。
写真では、4.10Vの時1023と表示しています。4.10V以上では1023のままです。
FVRとADCを利用すれば、デジタル電圧計を作ることができます。
ただし、ADCの変換値がけっこうふらつきますので、ノイズ対策と平均化などの対策が必要です。