Scilab 15
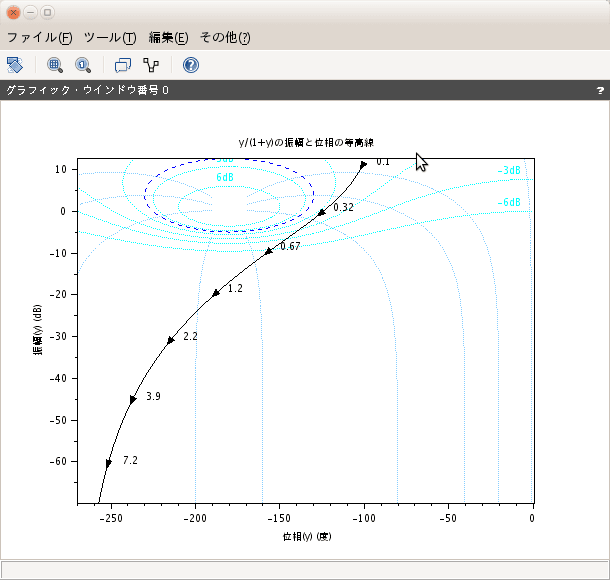
ニコルス線図の解説は他書に譲るとして(^^;
安定性の解析としては、ゲイン余裕、位相余裕という言葉をよく聞きます。
簡単に言えば、制御系の応答に関して、ゲイン余裕があるというのは、位相が−180度、つまり入力の位相と応答の位相が反対になるような周波数で、ゲインが0dbまでどのくらいあるかというもので、これがマイナス、ゲインが0dbを超えている時には、もはや応答は不安定ということになります。制御としては、遅れが生じていて、制御が追いついているどころか、逆位相で煽っているような状態です。
逆に位相余裕とは、ゲインが0dbの時の周波数での位相−180度までどの程度の位相角があるかということで、逆位相になって、簡単なイメージでは逆に制御する=発散するまので余裕ということになります。
通常、位相余裕は30度から60度くらいと言われています。一般にゲインだけをいじり、位相余裕を得る時には、ゲインを下げていくことになり、応答性が悪くなります。応答性とはランプ入力の追従性などに現れます。
対策は 補償器 というのを入れる設計をすることです。
さて、matlabゲイン余裕、位相余裕などを計算するコマンドは
margin(sys)でできるのですが、scilabでは
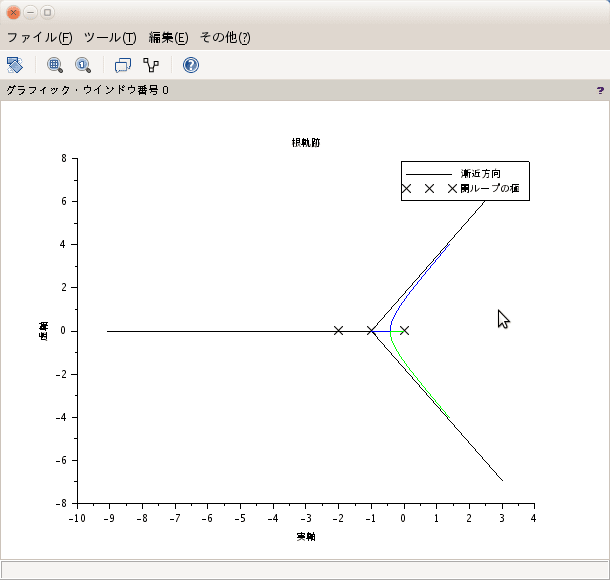
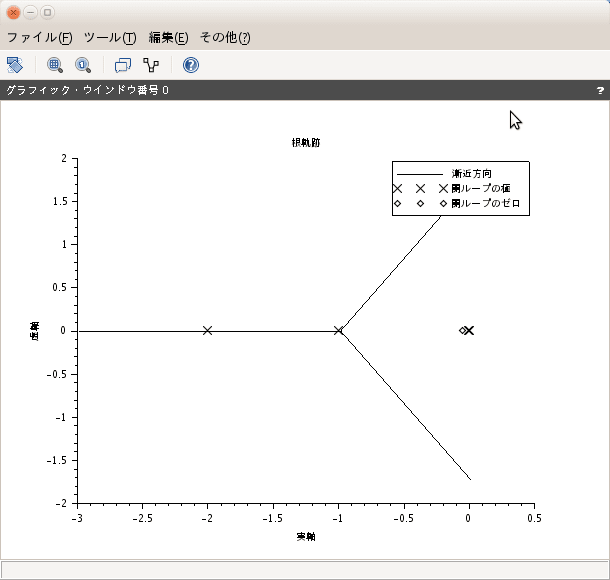
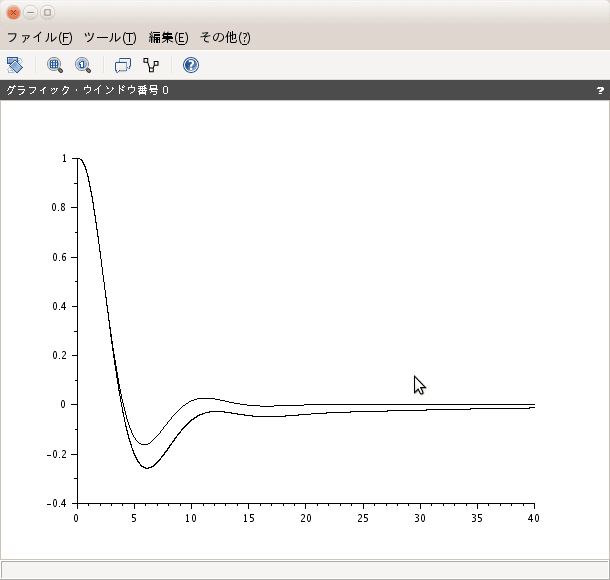
-->s=poly(0,'s');
-->h=20*(s+1)/(s*(s+5)*(s^2+2*s+10));
-->H=syslin('c',h);
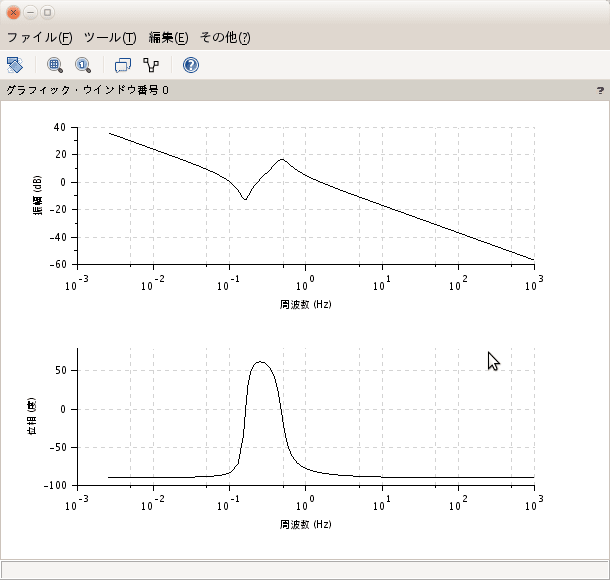
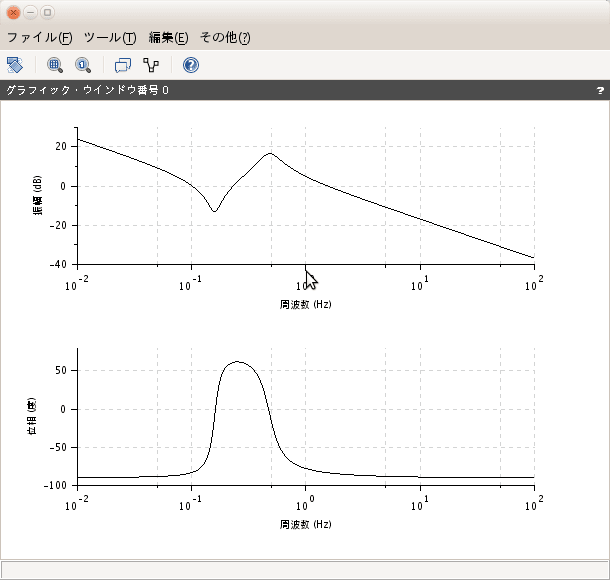
-->bode(H);
-->show_margins(H);
で位相余裕とゲイン余裕をグラフに示してくれます。

ニコルス線図の解説は他書に譲るとして(^^;
 | 制御基礎理論―古典から現代まで |
| 中野 道雄,美多 勉 | |
| 昭晃堂 |
安定性の解析としては、ゲイン余裕、位相余裕という言葉をよく聞きます。
簡単に言えば、制御系の応答に関して、ゲイン余裕があるというのは、位相が−180度、つまり入力の位相と応答の位相が反対になるような周波数で、ゲインが0dbまでどのくらいあるかというもので、これがマイナス、ゲインが0dbを超えている時には、もはや応答は不安定ということになります。制御としては、遅れが生じていて、制御が追いついているどころか、逆位相で煽っているような状態です。
逆に位相余裕とは、ゲインが0dbの時の周波数での位相−180度までどの程度の位相角があるかということで、逆位相になって、簡単なイメージでは逆に制御する=発散するまので余裕ということになります。
通常、位相余裕は30度から60度くらいと言われています。一般にゲインだけをいじり、位相余裕を得る時には、ゲインを下げていくことになり、応答性が悪くなります。応答性とはランプ入力の追従性などに現れます。
対策は 補償器 というのを入れる設計をすることです。
さて、matlabゲイン余裕、位相余裕などを計算するコマンドは
margin(sys)でできるのですが、scilabでは
-->s=poly(0,'s');
-->h=20*(s+1)/(s*(s+5)*(s^2+2*s+10));
-->H=syslin('c',h);
-->bode(H);
-->show_margins(H);
で位相余裕とゲイン余裕をグラフに示してくれます。