








やはりPIDの係数を調整中
色々触っている内にソナーの急激な反応が抑えられてきました
押さえすぎると効果無くなるのでまだまだ調整しなくてはなりません
ホバーで一定高度スロ位置でソナーONしソナーが切れるスロ位置が分かってきました
どうも中立ホバー位置はプロポ側でなくCGS側からやらないと駄目かも?
ただ思ったのはソナーOFFにしても何故かソナー効果が残る様な・・・NAZE!!
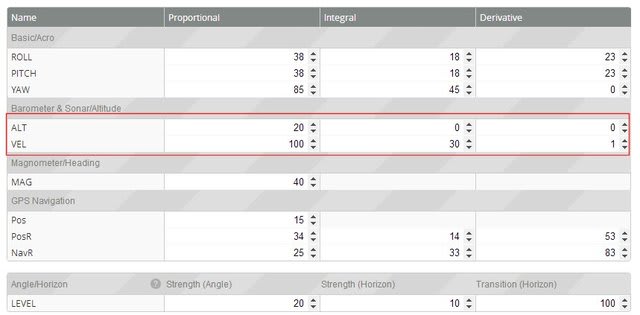
なるほど急激な変動はこれでしたVEL、速度か~~ゲームで呼ばれていたSPPEDでなく超速を意味します
設定を戻してこの数値を煮詰めます・・・

で他は戻しVEL90で以下動画で・・・十数センチの高度、強力な吹き返しでも高度保持しました
そして初めから両方のSW入れていたのだが・・・?
SATS10補足!GPS HOLD入れたいがやはり怖すぎる・・・まだ飲んでいないのだ(汗)
気を良くしてX500もと
しかし室内では爆風だし怖すぎたので調整は野外で・・・(汗)
出ていた妖怪、一反もめんが恐怖で隠れてしまいました(笑)
うん?ALT高さで制御!?
色々触っている内にソナーの急激な反応が抑えられてきました
押さえすぎると効果無くなるのでまだまだ調整しなくてはなりません
ホバーで一定高度スロ位置でソナーONしソナーが切れるスロ位置が分かってきました
どうも中立ホバー位置はプロポ側でなくCGS側からやらないと駄目かも?
ただ思ったのはソナーOFFにしても何故かソナー効果が残る様な・・・NAZE!!
なるほど急激な変動はこれでしたVEL、速度か~~ゲームで呼ばれていたSPPEDでなく超速を意味します
設定を戻してこの数値を煮詰めます・・・
で他は戻しVEL90で以下動画で・・・十数センチの高度、強力な吹き返しでも高度保持しました
そして初めから両方のSW入れていたのだが・・・?
SATS10補足!GPS HOLD入れたいがやはり怖すぎる・・・まだ飲んでいないのだ(汗)
気を良くしてX500もと
しかし室内では爆風だし怖すぎたので調整は野外で・・・(汗)
出ていた妖怪、一反もめんが恐怖で隠れてしまいました(笑)
うん?ALT高さで制御!?




