








免震の制御系について解説する
減衰を効果的に得るために,ダンパーの減衰を可変にしたセミアクティブサスペンションが実用化されていることについては述べた.
その,減衰を可変に,どのように制御するかを決めるのが制御系の設計となる.
一つの方法は,最適制御則を使って設計する方法がある.
最適制御則は,評価関数を使って,その評価関数を最小にするような制御則を求める方法である.といっても,これだけを述べただけでは解説になっていないが数式を使う必要がある.
しかし数式を使う事を避けるために,概念的に説明することにする.詳しく知りたい方は制御系の参考書は沢山あるのでそちらを見ていただきたい.
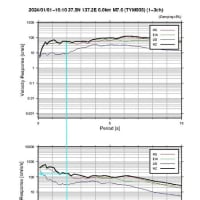
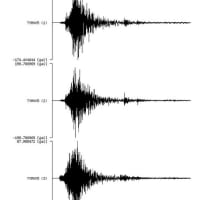
振動系の場合,入力(外力=地震)の振動数により,その応答がどうしても大きくなる振動数がある.これを共振と呼ぶが,線形の方程式すると,その周波数は求まる.質量とばね定数の比によって決まる.質量がばねに対して大きければ,大きいほど振動数は遅くなる.重いものはゆっくり動くイメージを持ってもらえば良い.
それの逆は,つまり質量がばねに対して相対的に軽い場合,速く振動するようになる.その共振する振動数に対して効果的に減衰させないと,周波数全体で考えた評価関数があった場合,足し合わせる(通常は積分している)とその値は大きくなる.そこで,制御する場合,直感的にその振動数の振動で,位相が逆になるように力を加えてやれば良いことがわかる.そのためには,振動の状態を知ってそれに合わせて力を加えることになる.これをフィードバックと呼ぶ.状態フィードバックというが,振動を知る事が必要と成る.
これを数式を使って,求める手法があり(詳細は省く),制御則が求まる.
ちょっとわかりにくかったかもしれません(反省)
減衰を効果的に得るために,ダンパーの減衰を可変にしたセミアクティブサスペンションが実用化されていることについては述べた.
その,減衰を可変に,どのように制御するかを決めるのが制御系の設計となる.
一つの方法は,最適制御則を使って設計する方法がある.
最適制御則は,評価関数を使って,その評価関数を最小にするような制御則を求める方法である.といっても,これだけを述べただけでは解説になっていないが数式を使う必要がある.
しかし数式を使う事を避けるために,概念的に説明することにする.詳しく知りたい方は制御系の参考書は沢山あるのでそちらを見ていただきたい.
振動系の場合,入力(外力=地震)の振動数により,その応答がどうしても大きくなる振動数がある.これを共振と呼ぶが,線形の方程式すると,その周波数は求まる.質量とばね定数の比によって決まる.質量がばねに対して大きければ,大きいほど振動数は遅くなる.重いものはゆっくり動くイメージを持ってもらえば良い.
それの逆は,つまり質量がばねに対して相対的に軽い場合,速く振動するようになる.その共振する振動数に対して効果的に減衰させないと,周波数全体で考えた評価関数があった場合,足し合わせる(通常は積分している)とその値は大きくなる.そこで,制御する場合,直感的にその振動数の振動で,位相が逆になるように力を加えてやれば良いことがわかる.そのためには,振動の状態を知ってそれに合わせて力を加えることになる.これをフィードバックと呼ぶ.状態フィードバックというが,振動を知る事が必要と成る.
これを数式を使って,求める手法があり(詳細は省く),制御則が求まる.
ちょっとわかりにくかったかもしれません(反省)




※コメント投稿者のブログIDはブログ作成者のみに通知されます