








4号電波探信儀1型のブロックダイヤグラムによる動作概念の解説について
米軍へ提出されたブロックダイヤグラムのタイトルには、Type 41(S3)Anti-Aircraft Radarとある
製造会社は住友通信(日本電気)である。
日本側での制式呼称は、4号電波探信儀1型である。
なお、米軍へ提出されたブロックダイヤグラムは、制御ラインなどに不適切・不足箇所などがあると判断して、こちらで補正などの修正を行っている。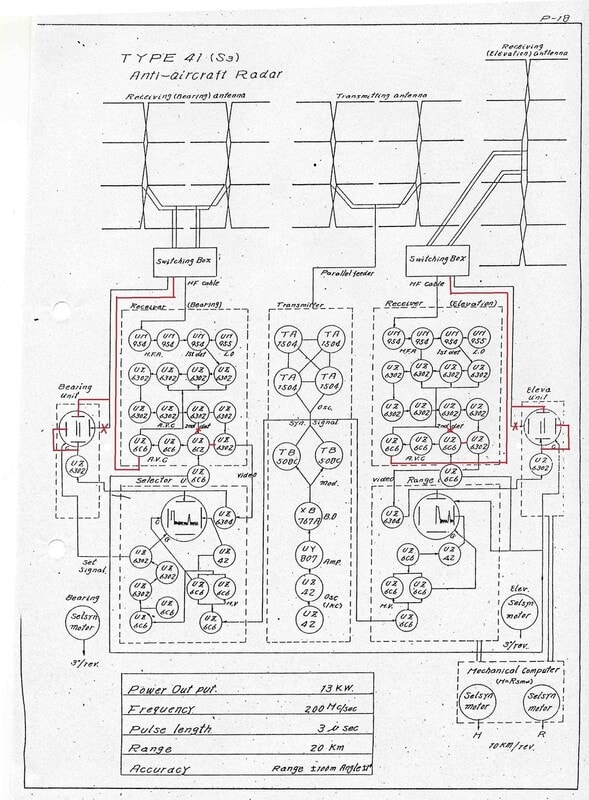
ブロックダイヤグラムでは、次の6つのブロックの機能で構成されている。
Receiver(Bearing) Receiver(Elevation) Transmitter Selector Unit Range Unit Mechanical Computer
空中線(Antenna Unit)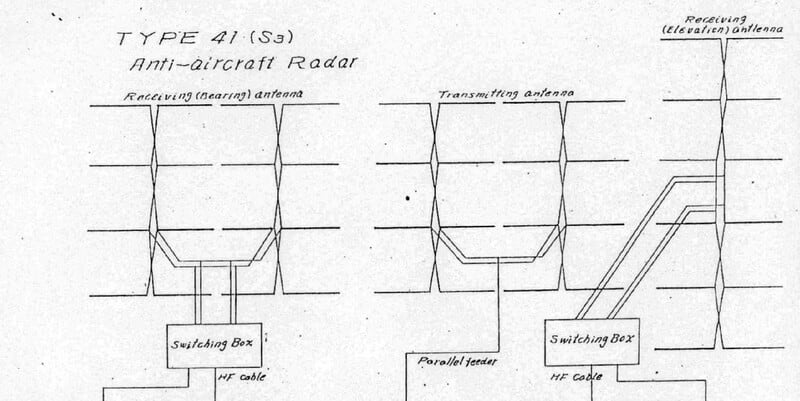
送信用空中線は半波長ダイポール水平2列4段反射器付のスタック構成である。
方位角測定用空中線は半波長ダイポール水平1列4段反射器付を左右2組用意して空中線切替器を利用して等感度方式を実現している。
仰角測定用空中線は半波長ダイポール水平1列3段反射器付 を上下2組用意して空中線切替器を利用して等感度方式を実現している。
日米開戦の初戦によりフィリピンで鹵獲した米軍のSCR-268を参考に開発したことから、空中線構造にはかなりの類似点がある。
受信機(Receiver Unit)
Receiver(Bearing) Receiver(Elevation)のコメントがあるように、受信機は方位角用と仰角用に同じものを2組用意している。
なお、英軍のSLCレーダーでは位相環により、1つの受信機で上下、左右の4つの空中線の受信信号を処理しているのが大きな違いである。
エーコン管による高周波増幅2段、中間周波増幅6段、検波、低周波増幅2段及びAVC制御付加した標準的な受信機構成に、選択器の機能であるゲート機能を受信機内に設けている。
※参考事例:ST管によるレーダー実装事例について
日本電気製の海軍4号電波探信儀1型(ペリリュー島、1944年10月にて米軍に鹵獲)
2台の受信機の内部構造がよくわかる資料である。

送信機(Transmitter Unit)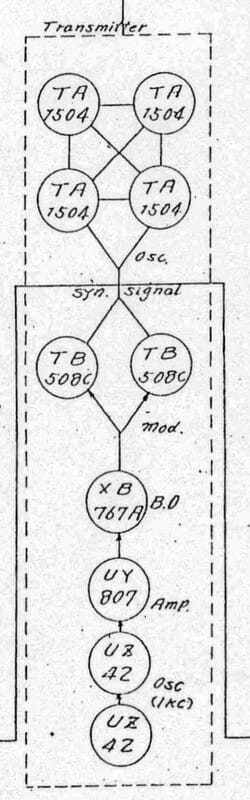

UZ-42による1Khzの正弦波を発生させて、これを同期信号の基準としている。
次のUZ-42で飽和増幅して正弦波を矩形波に変換し、出力側で微分回路を通し、送信同期用バルス波を生成する。以降段のUY-807(Amp)→XB767R(B.O.;バッファ増幅)→TB500C(Mod)プッシュプルでグリッド変調器からTA1504×4本のリング発振器より送信電力を生成している。
使用周波数は200Mhzである。
選択装置(Selector Unit) 

この選択信号の生成方法は以下のとおりである。
送信機で生成した同期信号パルスを変調段で誘導コイルなどにより選択器に引き込み、UZ-6C6×2本(M.V.)のマルチバイブレーターのトリガー信号として同期信号パルスを利用している。
マルチバイブレーターの発振周波数は原発振周波数では1Khzであるが、この周波数ならば理論的な測距可能距離は150Kmとなり実用的な射撃完成レーダーの範囲を超えている。
したがって、マルチバイブレーターの発振周波数はたぶん2Khzとして、理論的な測距可能距離は75Kmと設定しているものと判断される。
このマルチバイブレーターにより、のこぎり波を生成し、選択器の指示管と方位角用指示管の水平軸の掃引として印加している。
受信機(方位角用)の受信信号は、同じように選択器の指示管と方位角用指示管の垂直軸に印加される。
一方、選択機能の仕組みとしては、マルチバイブレーターより2Khzの「のこぎり波」を作っているので、この「のこぎり波」を利用して、Limitterの機能として、カソードバイアス電圧を可変としたプレート検波を行い、「のこぎり波」の頭を自由に切断する。
更にPulse Genの機能としてこれを微分回路に通すと位相を可変した選択信号パルスを生成できる。

生成した選択パルスについて、選択器の指示管、方位角用指示管、仰角用指示管及び測距用指示管のグリッドに輝度変調として印加することにより、選択された移相のところで輝点として発光する。
このように本機では、特殊な回路による位相調整器を実現しているが、一般的には、ツーロン回路やゴニオメーターによる位相調整器が採用されている。
選択器の処理イメージを下記に示す。
測距装置(Range Unit)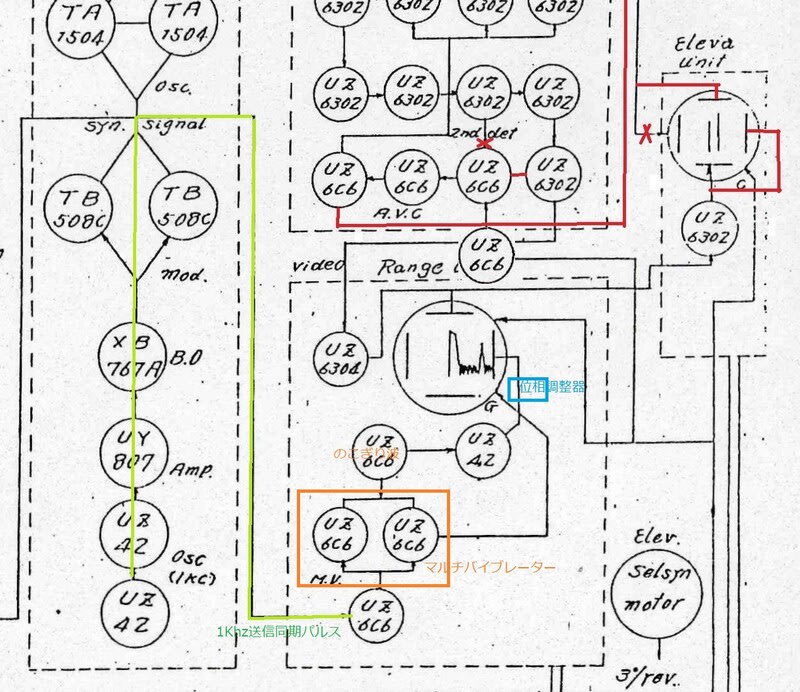
送信機で生成した同期信号パルスを変調段で誘導コイルなどにより選択器に引き込み、UZ-6C6×2本(M.V.)のマルチバイブレーターのトリガー信号として同期信号パルスを利用している。
マルチバイブレーターの発振周波数は原発振周波数では1Khzであるが、この周波数ならば理論的な測距可能距離は150Kmとなり実用的な射撃完成レーダーの範囲を超えている。
したがって、マルチバイブレーターの発振周波数はたぶん2Khzとして、理論的な測距可能距離は75Kmと設定しているものと判断される。
このマルチバイブレーターにより、のこぎり波を生成し、測距器の指示管と仰角用指示管の水平軸の掃引として印加している。
受信機(方位角用)の受信信号は、同じように測距器の指示管と仰角用指示管の垂直軸に印加される。
測距装置のブロックダイヤグラムをみても、残念ながら移相調整機能は明示されていない。
このままでは、単なるオシロスコープの機能にすぎない。
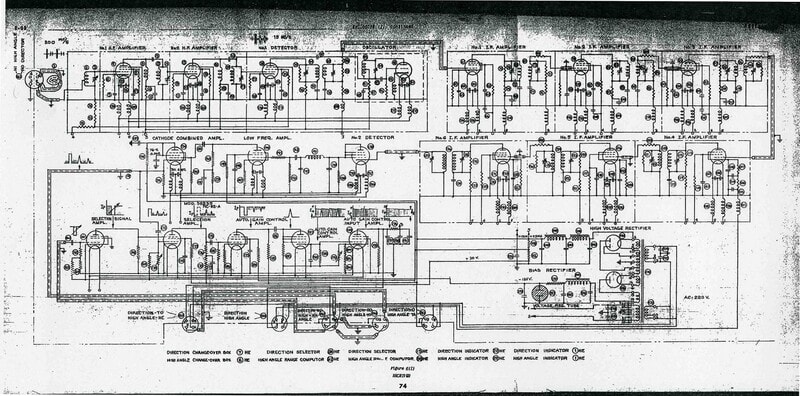
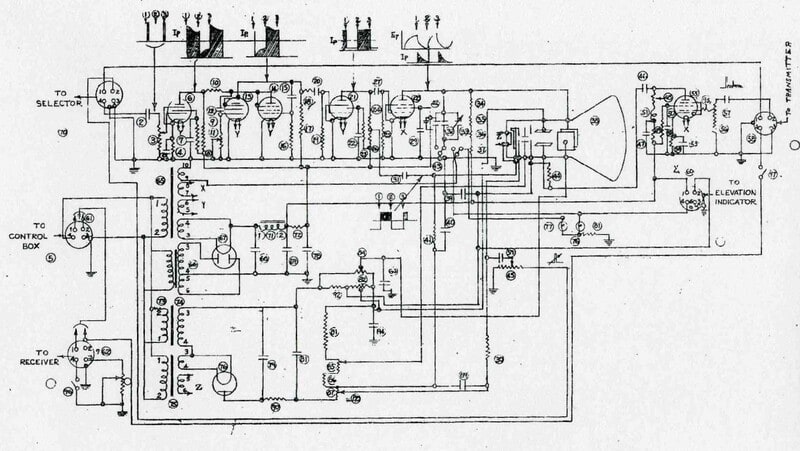
Reports of the U.S. Naval Technical Mission to Japan, 1945-1946には、4号電波探信儀1型の各機能の配線図が付属しているが、その配線図をみても位相調整機能は特定することができなかったが、外部接続端子らしきものは確認できる。
実機の写真から測距装置を観察すると、測距装置の横に位相調整器が独立して設置していることが判る。
このことから、測器装置の外付けの機能として位相調整器が独立していると判断される。
参考元の米軍のSCR-268の測距装置にはゴニオメーターか採用されていることから、本機の位相調整器も、ゴニオメーターと考えられる。
位相調整器には移相を変化させるハンドルを廻すことにより、その移相変化分を距離換算した距離をデジタル表示することができる。
測距用指示管の処理イメージを以下に示す。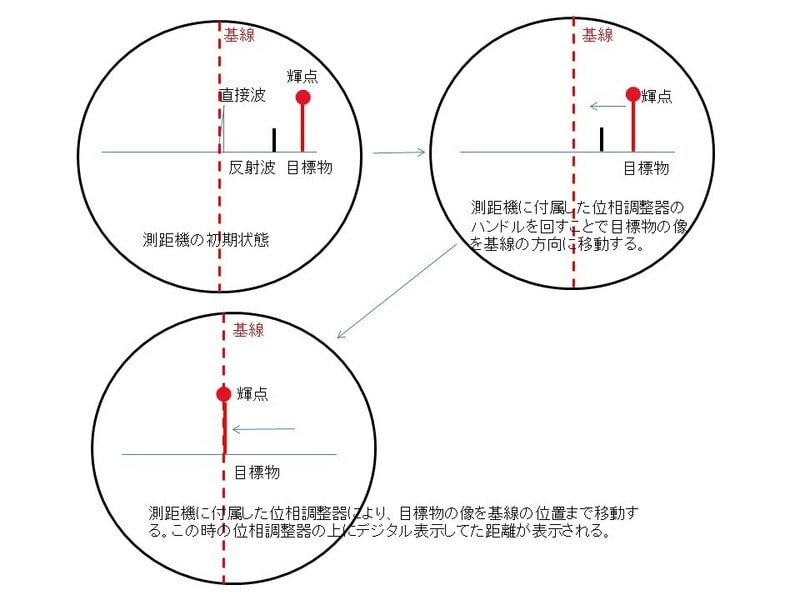
照準用指示管(方位角用と仰角用)
本機能は選択機と測距機内の付属機能として装備されているが、独立した項として取り扱う。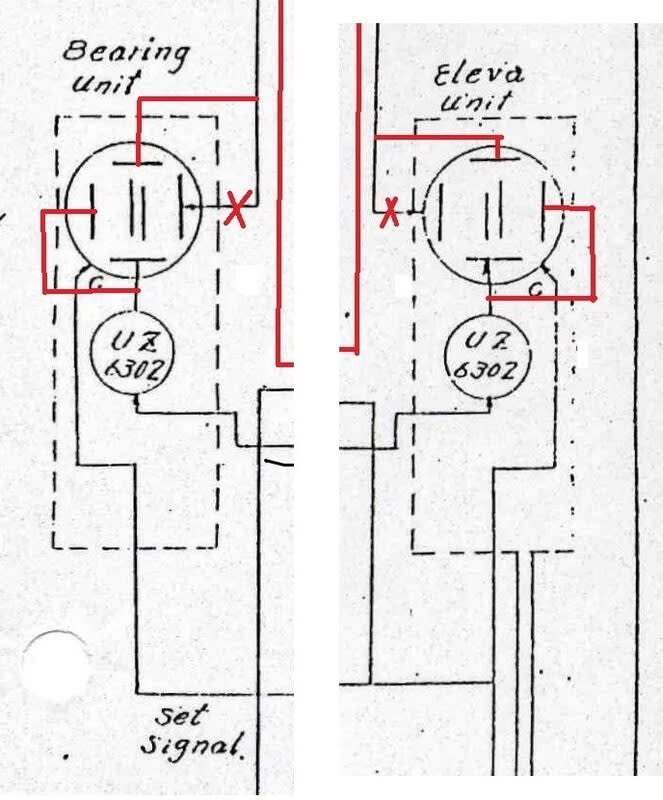
本ブロックダイヤグラムを眺めても、動作原理を推論することはできない。
したがって、今回は配線図のみを考察して、具体的な動作原理を確認することにした。
なお、本機能は、4号電波探信儀2型改2の照準指示管と同じ仕組みが採用されている。
照準装置(方位角と仰角用)の指示管のブラウン管の配線状況を見ると、全く一般のオシロスコープの機能を搭載している。
具体的には、焦点、輝度、上下、左右及び入力調整の基本機能を用意している。
ただし、掃引部の調整機能は付属していない。
この理由は、水平軸には一般的な「のこぎり波」などの掃引を使用せず、交流信号を使用した直交ベクトル合成方式により描画を実現していることであり、そういう意味では特異な使い方のオシロスープといえる。
照準装置(方位角と仰角用)は、水平軸用増幅部及び垂直軸入力部の2つの機能から構成されている。
水平軸用増幅部
受信機からの受信信号をUZ-6302(Amp)で増幅し、ブラウン管の水平軸に印加する。
垂直軸入力部
検波された受信信号のうち選択機(41号では受信機内の機能)により選択された受信信号のみ通過させ、分配器により上下、左右の4つの受信信号として取り出し、照準装置(方位角と仰角用)の指示管のブラウン管の垂直軸の偏向板に印加する。
特徴
水平軸に印加された受信信号(交流)と垂直軸に印加された分配器により上下、左右の4つの受信信号を直交ベクトルデータとして、照準装置(方位角と仰角用)に表示する。
この時、分配器により上下、左右のアンテナの機械的SWによる時間差分が上下と左右の2本の直交データとして表示されることになる。
したがって、照準装置(方位角と仰角用)のこの2本の像を平行にするようにアンテナの向きを行うことで、目標物の正確な方位角や仰角の情報を得ることができる。
照準装置(方位角と仰角用)の指示管の処理イメージを下記に示す。

機械式計算機(Mechanical Computer)
当時の射撃管制レーダーで取得できる直接データは、目標物の飛行機に対して直角三角形の斜辺にあたる距離データとその仰角データの2つのみである。
しかしながら、高射算定具の入力データは、目標物の高度データと仰角データが必要となる。
このため、斜辺にあたる距離データとその仰角データから高さである高度データを計算する必要がある。
計算式については、ブロックダイヤグラムにも以下のようにコメントされている。
H(高度)=R(斜辺にあたる距離データ)sinα(仰角データ)とある。
上記の計算式を歯車機構などによるアナログコンピューターで実現している。
更に、高射算定具の入力データまでのデータ入力を自動化するため、方位角用ハンドル、仰角用ハンドル及び測距用ハンドルを回転させることに連動してセルシン・モーター(シンクロのこと)と結合しておき、自動的にこの機械式計算機(Mechanical Computer)の入力データとして連動させている。
計算結果については、更にセルシン・モーターにより高射算定具へ送られる。
この仕組みについては、米軍のSCR-2684のConverter BC-437の機能をコピーしたものと思われる。
参考に米軍のブロックダイヤグラムを示す。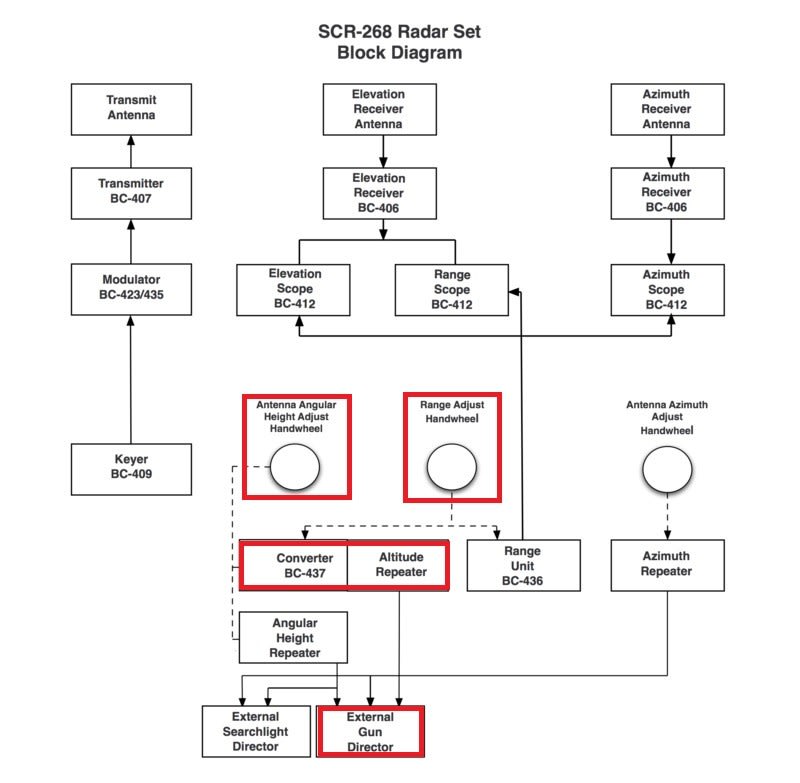
参考に海軍の高射算定具を示す。
※参考資料 高射砲部隊の実際の運用について
http://minouta17.livedoor.blog/archives/20559560.html
参考文献
Reports of the U.S. Naval Technical Mission to Japan, 1945-1946
「日本無線史」10巻 1951年 電波管理委員会
「元軍令部通信課長の回想」昭和56年 鮫島素直
機密兵器の全貌 昭和51年6月 原書房
日本海軍小禄(那覇)飛行場 http://evnara.blog.fc2.com/blog-entry-50.html
米国国立公文書館
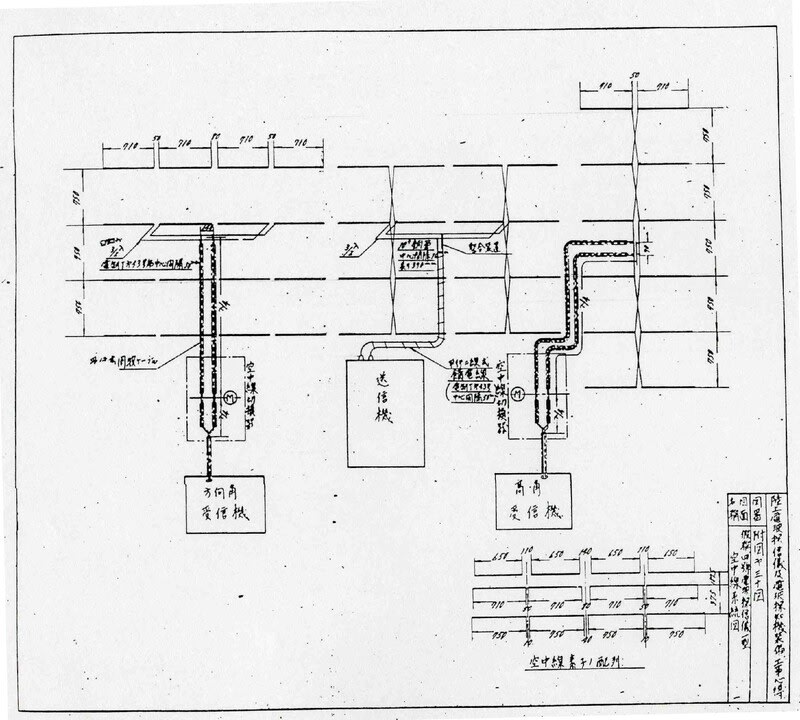
電波探信儀および電波探知機装備工事心得 国立公文書館
Anatoly Koshkarov提供資料