2024年5月18日(土曜日) 晴れ
組み立てが終わったサーボモーターをマイコン(ESP32)に
接続して動作させてみました。
接続はこんな感じです。


配線はごちゃごちゃです。

マイコンには簡単なプログラムを組み込みました。
コントローラの軸を回転させるとその回転に追従するように
サーボモーターが回転します。
ただ、サーボモーターは本来は停止するべきところで「ピクピク・・・」と
動いてしまいます。
アナログーデジタル変換の入力に余分な信号(ノイズ?)が乗って
その出力で細かく振動(ピクピク・・・)してしまうのかもしれません。
そんなサーボモーターの動きをどうぞ動画でご覧ください。
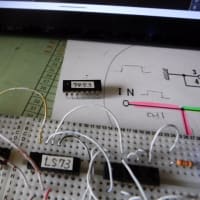
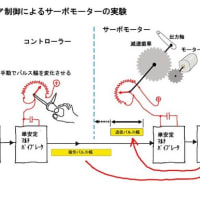
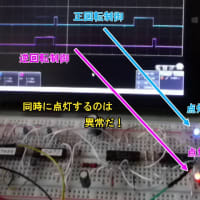
プログラムはコントローラの出力電圧とポテンショメータの出力電圧を比較して
もしコントローラの電圧の方が大きい(高い)場合はポテンショメータの出力を
大きく(高く)する方向にモーターを回転させる、逆の場合はポテンショメータの
出力を小さく(低く)する方向に回転させ、両者の電圧が等しくなったところで
モーターを停止させる・・・ただこれだけです。
信号線にノイズが乗ってもピクピク動かないようにプログラムで制御できれば
良いのですが・・・ 勉強してみます。
(続く)