2010.08.24 巷のゴミ理論 2-3
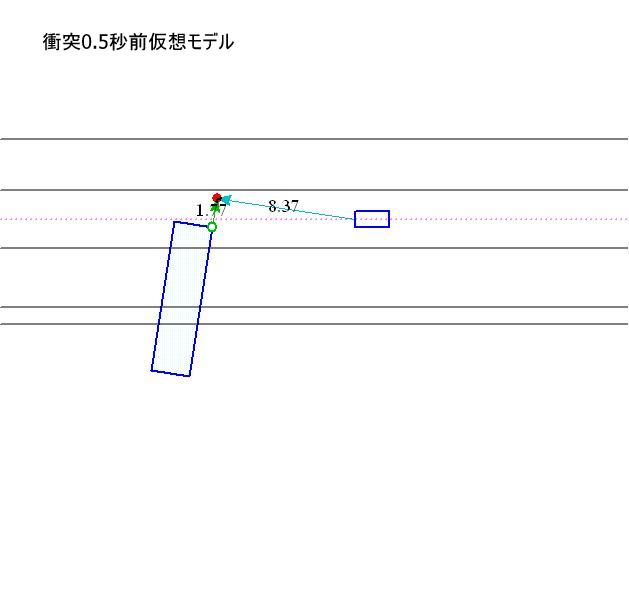
前回の記事での仮想モデルから0.5秒経過した仮想モデル。
バイクが第2車線真ん中走行ラインを変えずに維持していたら、

こうなる。
バスの右前角は衝突地点まで1.77m、
バスの左前角はほぼ第2車線真ん中に来ている。
要するにバイクの真正面にバスはもう来ている。
(これは簡易的な直線モデルなので実際はもっと早く正面に見える)
さて、ここで漸く進路を変える決断をしたとして、
残り8.37m進む間に僅かに1.25mだけ(結果的には正に丁度ぶつかるように)
しかも「直角に」ぶつかるということはどうも考えられない。
少なくともおよそ100m手前からバスの動向認識可能な位置関係にあって、
仮にバスの前をすり抜けようとしていたならば
もっとずっと早くに安全な距離を取ろうとして
右折車線へ移動して大回りするような進路を取っていただろし、
その場合にはやはり安全距離確保の為加速するのが自然だろう。
遠くの対向車線から「このままではぶつかる!!」
と思ったとかいう55m手前衝突3.3秒前から
ずっと「そのまま」状態を維持する必然性はない。
バイクが第2車線真ん中走行ラインを変えずに維持していたら、
こうなる。
バスの右前角は衝突地点まで1.77m、
バスの左前角はほぼ第2車線真ん中に来ている。
要するにバイクの真正面にバスはもう来ている。
(これは簡易的な直線モデルなので実際はもっと早く正面に見える)
さて、ここで漸く進路を変える決断をしたとして、
残り8.37m進む間に僅かに1.25mだけ(結果的には正に丁度ぶつかるように)
しかも「直角に」ぶつかるということはどうも考えられない。
少なくともおよそ100m手前からバスの動向認識可能な位置関係にあって、
仮にバスの前をすり抜けようとしていたならば
もっとずっと早くに安全な距離を取ろうとして
右折車線へ移動して大回りするような進路を取っていただろし、
その場合にはやはり安全距離確保の為加速するのが自然だろう。
遠くの対向車線から「このままではぶつかる!!」
と思ったとかいう55m手前衝突3.3秒前から
ずっと「そのまま」状態を維持する必然性はない。