今回は高度とGPSのPIDをメインで10バッテリーでPIDは煮詰まりました!!
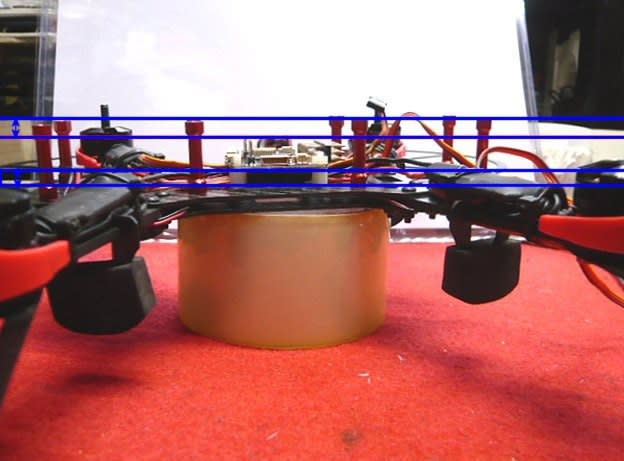
アイレベル以下でもピタリ高度保持します、全て調整完了!!
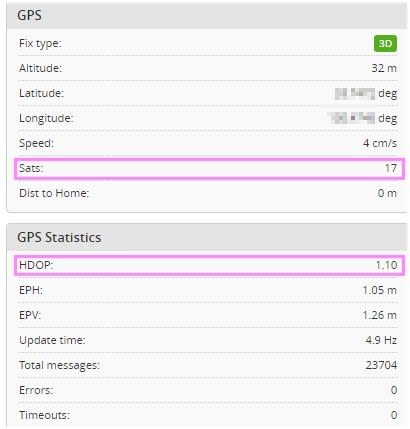
GPS HOLDもNAZE32からすると新GCSでかなり止まりますね~高SATSの野外環境で早く試したいです~
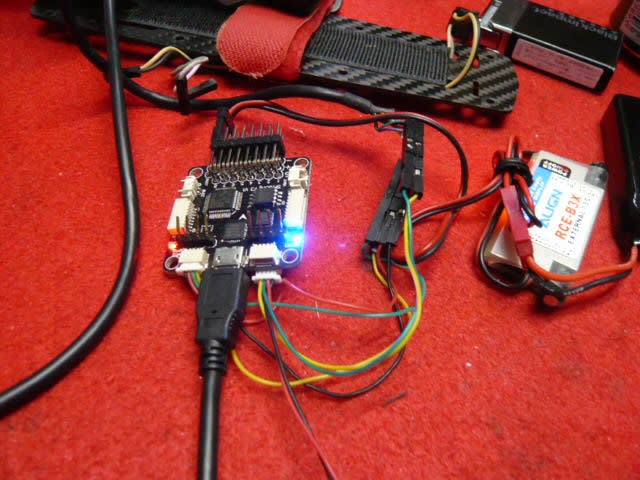
SPRACING F3に交換してとても満足でした!

アイレベル以下でもピタリ高度保持します、全て調整完了!!
GPS HOLDもNAZE32からすると新GCSでかなり止まりますね~高SATSの野外環境で早く試したいです~
SPRACING F3に交換してとても満足でした!